Clear Sky Science · ru
Крупномасштабный когерентный 4D-излучающий сенсор
Видеть мир в четырёх измерениях
Беспилотные автомобили, доставочные дроны и очки дополненной реальности полагаются на машины, которые в реальном времени понимают трёхмерный мир вокруг них. Сегодня такие системы зрения часто громоздки, дороги или энергозатратны. В этой статье сообщается о значительном шаге к «4D-камере» — сенсору размером с чип, который не только строит 3D-карту сцены, но и измеряет движение объектов, что потенциально позволит встроить компактное машинное зрение в роботов и смартфоны.
От плоских фотографий к живым картам
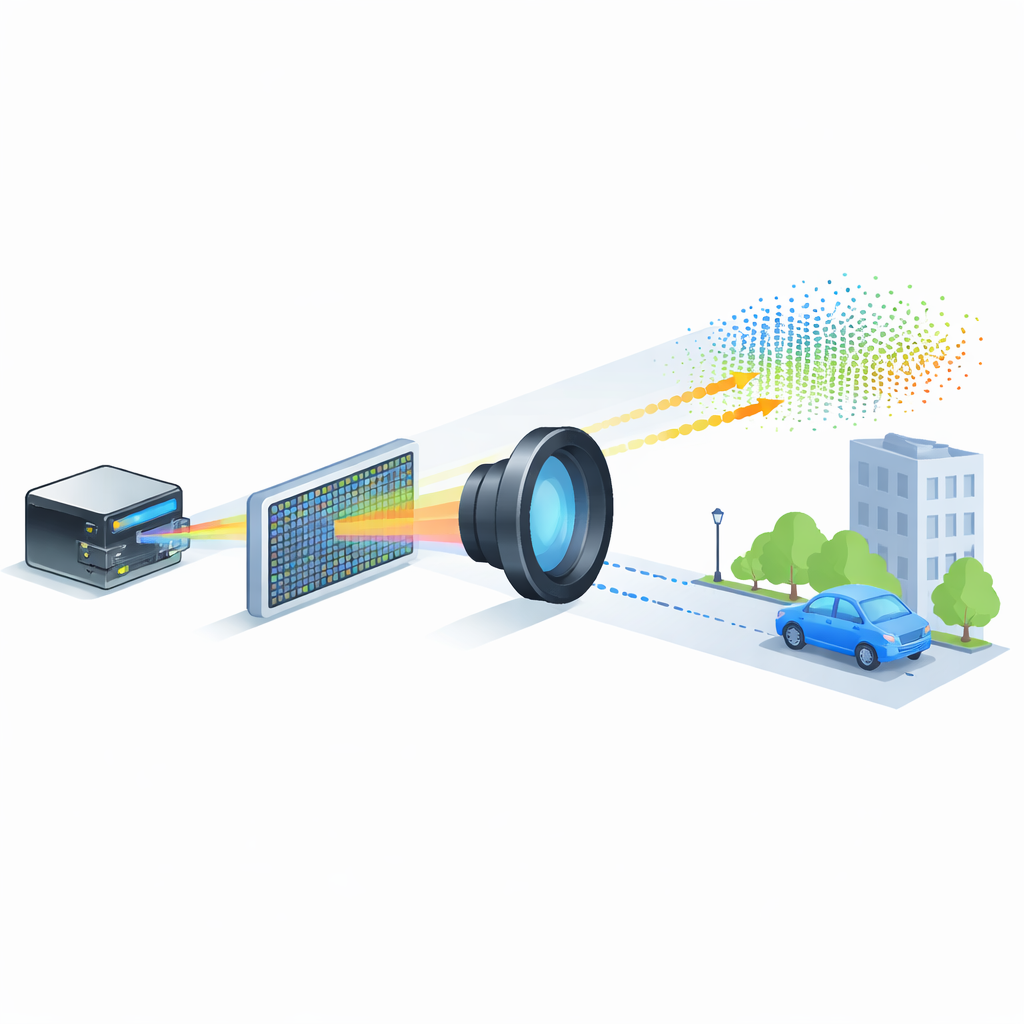
Обычные камеры фиксируют интенсивность света на плоскости, создавая красивые 2D-изображения, но не давая прямой информации о расстоянии. В отличие от них, системы обнаружения и дальнометрии (LiDAR) посылают лазерные импульсы и измеряют время их возврата, строя 3D-карту окружения. Существующие подходы умеют видеть на большие расстояния и с высокой детальностью, но обычно требуют подвижных частей, больших оптических элементов или больших затрат энергии на точку измерения. Это затрудняет создание чего-то столь же маленького, дешёвого и надёжного, как камера в смартфоне, но способного безопасно сканировать улицы, промышленные объекты или заполненные людьми помещения с высокой точностью.
Чип, измеряющий расстояние и движение
Исследователи представляют новый тип массива приёмо-передающей матрицы LiDAR — по сути LiDAR-версию сенсорного чипа, как в цифровой камере. Их устройство содержит 352 на 176 пикселей, всего более 60 000 точек съёмки, всё это построено на одном кремниевом фотоническом чипе вместе с управляющей электроникой. Вместо коротких лазерных импульсов система использует частотно-модулированный непрерывный сигнал (FMCW), при котором цвет лазера последовательно изменяется в управляемом «чирпе». Когда свет отражается от объектов и возвращается на чип, он когерентно смешивается с опорным пучком. Небольшие различия в частоте дают информацию как о расстоянии до каждой точки, так и о скорости её удаления или приближения к сенсору, добавляя скорость в качестве четвёртого измеряемого измерения.
Как работает крошечная световая матрица
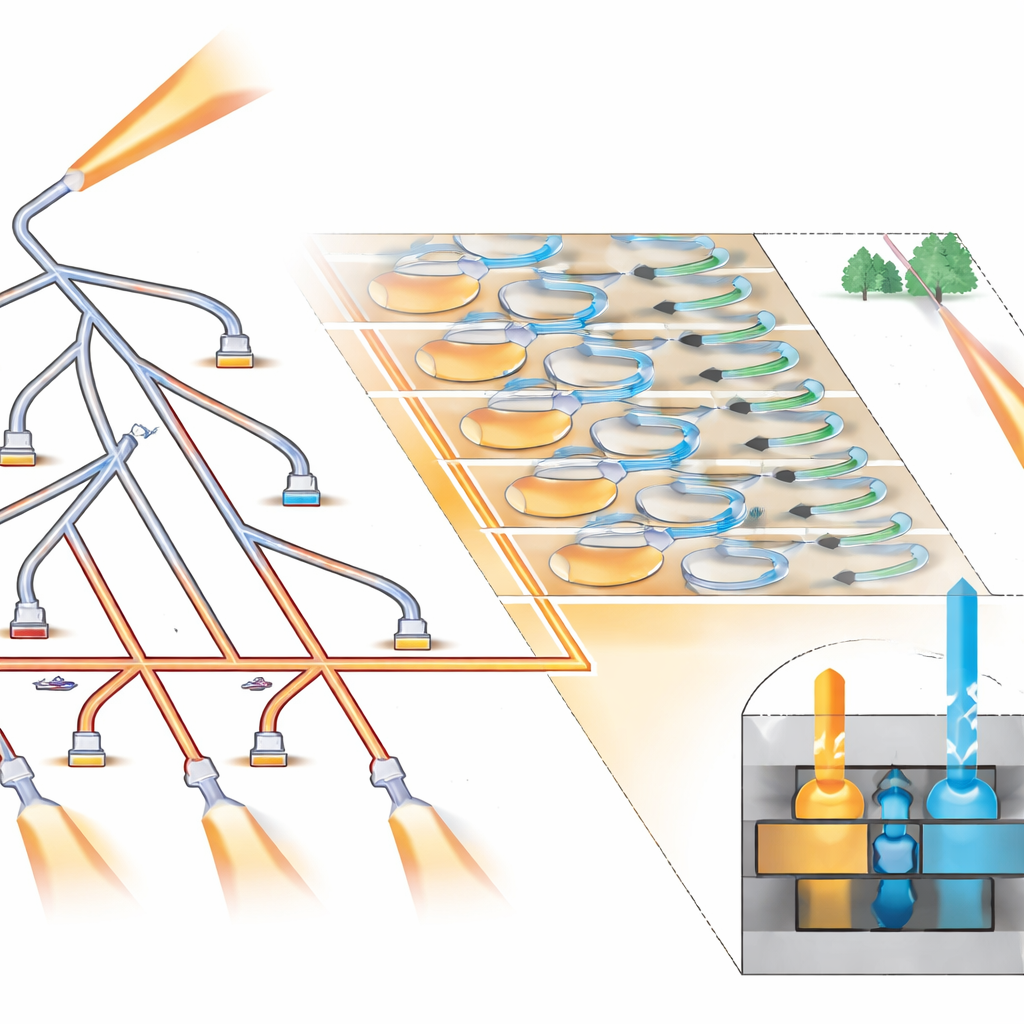
Чтобы покрыть множество пикселей без лишних потерь энергии, чип направляет чирпованный лазерный свет через дерево миниатюрных оптических переключателей, поочередно подводя его к группам по восемь соседних пикселей. Внутри каждой группы свет равномерно делится, так что все восемь одновременно функционируют как передатчики и приёмники. Каждый пиксель использует пару решётчатых выводов для отправки и сбора света, пару сбалансированных фотоприёмников и усилитель на пикселе для извлечения биений, кодирующих расстояние и скорость. Специально разработанные микролинзы, нанесённые непосредственно на чип, помогают эффективнее направлять свет, повышая КПД. Поскольку то же отверстие излучает и принимает свет (моностатическая схема), система избегает паразитных перекрёстных взаимодействий между пикселями и требует только одной внешней объектива, подобно обычной камере.
Тестирование 4D-камеры
Используя готовые коротковолновые инфракрасные объективы, команда собрала модуль, похожий на камеру, вокруг чипа и получила детальные 3D-облака точек внутренних и внешних сцен. С одним объективом сенсор обеспечил поле зрения примерно 33 на 19 градусов и угловое разрешение до 0,06 градуса — достаточно, чтобы различать мебель в офисе и архитектурные детали на зданиях на десятки метров. Система измеряла объекты на расстоянии от 4 до 65 метров, используя лишь десятки наносекунд джоулей оптической энергии на точку и среднюю направленную мощность около 178 микроватт на пиксель, оставаясь в пределах строгих ограничений по безопасности для глаз. Она также отслеживала движение: в одном эксперименте была измерена изменяющаяся радиальная скорость вращающегося диска с точностью миллиметров в секунду.
Производительность, ограничения и перспективы роста
Тщательные измерения показывают, что производительность сенсора близка к фундаментальным физическим пределам, определяемым квантовой природой света, но ещё не достигла их полностью. На сегодняшний день основное ограничение — электронный шум от усилителей в каждом пикселе, что несколько снижает отношение сигнал/шум по сравнению с идеальным детектором, ограниченным только фотонами. Авторы предлагают простые конструктивные изменения — главным образом увеличение уровня внутреннего опорного света и доработка оптической компоновки, с возможным использованием смесей кремния и нитрида кремния — которые могут перевести систему в режим, действительно ограниченный шумом от отдельных фотонов, и увеличить рабочую дальность свыше 200 метров. Перенос части встроенных переключателей за пределы матрицы пикселей также уберёт небольшие пропуски в покрытии дальнего поля и обеспечит более чистые облака точек.
К повседневному 4D-зрению
Эта работа демонстрирует компактный, полностью интегрированный 4D-излучающий сенсор, который сопоставим по числу пикселей и дальности с требованиями многих практических приложений, при этом контролируя потребление энергии и размеры. Объединив источники света, приёмники, управление лучом и управляющую электронику на одном кремниевом чипе, устройство выполняет для 3D- и скоростного зондирования роль, аналогичную той, которую сыграл CMOS-сенсор для цифровой фотографии. При дальнейшем совершенствовании такие сенсоры могут стать достаточно недорогими и надёжными для встраивания в автомобили, роботов, телефоны и гарнитуры, давая машинам точное, оперативное понимание 3D-мира и того, как он меняется из мгновения в мгновение.
Цитирование: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
Ключевые слова: LiDAR, 4D-изображение, кремниевая фотоника, автономные системы, измерение глубины