Clear Sky Science · ru
Масштабируемое локальное производство мультимодальной электронной кожи для интеллектуальной робототехники и интерактивных систем
Дарим роботам и игрушкам чувство осязания
Представьте себе робота, который аккуратно поднимает ломтик горячего тоста, не раздавив его и не обожгив руку, или игрушку, которая реагирует по-разному, когда вы обнимаете её, сгибаете ухо или греете ладонью. В этом исследовании описана новая разновидность «электронной кожи», которая приближает такие идеи к реальности, предоставляя машинам более богатое, человекоподобное чувство прикосновения и оценки близости объектов.
Почему машинам нужно лучшее осязание
Современные роботы и гаджеты по-прежнему неуклюжи в обращении с реальным миром. Многие из них способны ощущать лишь одну величину, например давление, и часто полагаются на громоздкие, собираемые вручную узлы, которые трудно масштабировать. Между тем человеческая кожа постоянно объединяет множество сигналов одновременно: легкое прикосновение, сильное давление, растяжение, тепло и даже чувство приближения предметов до контакта. Авторы работы поставили задачу создать электронный аналог кожи, который улавливает несколько таких ощущений одновременно, оставаясь тонким, гибким и легко настраиваемым под разные задачи.
Создание тонкого гибкого осязательного слоя
Команда разработала низкопрофильную «e- кожу» с технологией, не требующей чистой комнаты, которую можно масштабировать и быстро адаптировать. В основе лежит гибкая медная трассировка, нанесённая ультрафиолетовым лазером, которая выполняет роль проводки, как на печатной плате, но при этом может сгибаться и обвиваться вокруг кривых. Сверху и снизу этой трассировки расположен мягкий силиконовый слой с множеством мелких воздушных пор, подобно губке. Внешние поверхности покрыты тонкой плёнкой углеродных нанотрубок, образующей проводящую оболочку, которая одновременно защищает устройство от электрических помех и служит общей опорной слоем для измерений. Такая структура позволяет каждому сенсорному участку вести себя как небольшая электрическая ёмкость, значение которой меняется при нажатии, изгибе, нагреве или приближении объекта. Дополнительные миниатюрные чипы на той же гибкой разводке измеряют температуру и бесконтактную дистанцию, так что весь лист имитирует не только рецепторы давления и растяжения кожи, но и ощущение тепла и «ближнего зрения». 
Как датчики улавливают давление и деформацию
Чувствительные к давлению и изгибу элементы e-кожи сконструированы так, чтобы сильно реагировать на небольшие изменения и при этом оставаться долговечными. Когда что-то нажимает, поры в мягком слое сжимаются, сближая внутренние металлические слои и заменяя воздух на большее количество силикона. Оба эффекта усиливают электрический сигнал, особенно при низких давлениях, когда материал легче всего сжимается. Испытания показали, что e-кожа способна обнаруживать очень лёгкие прикосновения, до нескольких десятков паскалей, с быстрой реакцией и малым дрейфом даже после десяти тысяч циклов нажатия и отпускания. При изгибе листа он складывается вокруг внутренней проводки, снова уменьшая зазор между слоями с одной стороны и усиливая сигнал. Ответ становится заметнее при больших углах сгиба, что соответствует тому, что реальные изгибы склонны локализоваться в одной области, а не распространяться равномерно. В целом конструкция балансирует мягкость, стабильность и чувствительность без сложных многослойных структур, применяемых во многих ранних устройствах. 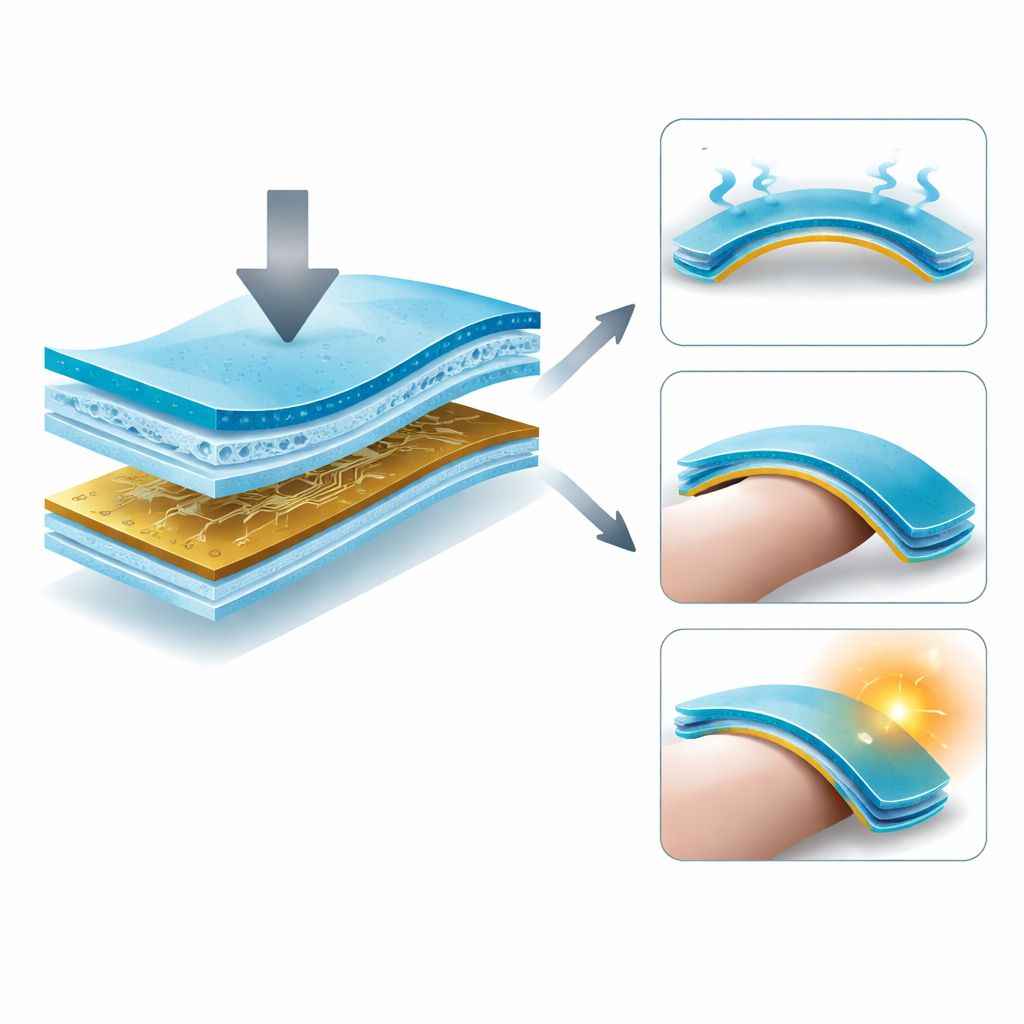
От кухонных роботов до игривых компаньонов
Чтобы продемонстрировать возможности e-кожи, исследователи обёрнули ею роботический захват и поручили роботу задачу в стиле кулинарии. По мере того как захват приближается к горячему куску хлеба, встраиваемый в кожу мини-модуль для измерения глубины сначала оценивает расстояние до объекта, помогая роботу сориентировать пальцы перед контактом. После соприкосновения датчики давления и изгиба направляют силу сжатия, предотвращая соскальзывание или раздавливание хлеба. Датчик температуры на том же листе проверяет, остыл ли хлеб настолько, чтобы его можно было безопасно передать человеку. В другом примере команда создала мягкую игрушку-слонёнка, покрытую e-кожей. Нажатие на грудь меняет ритм скрытого вибромотора, создавая ощущение сердцебиения, сгибание уха запускает звук, а тепло руки может подсветить щёчки игрушки, превращая прикосновение в игривое эмоциональное взаимодействие.
Наблюдение карт давления по поверхности
Помимо отдельных точек, тот же метод изготовления позволяет формировать крупные матрицы для считывания распределения давления по поверхности. Команда продемонстрировала сетку 8 на 15, работающую как «камера давления»: когда пальцы, грузы или тиснёные фигуры нажимают, система восстанавливает картину сил и даже выделяет контуры, например буквы. Способность фиксировать карты давления и центры масс может помочь роботам балансировать грузы, распознавать объекты или выступать в роли умных весов и интерактивных поверхностей. Поскольку используемый процесс быстр и модульный, разработчики могут настраивать размер, шаг и мягкость чувствительных пикселей для разных применений — от умной мебели до ковриков для мониторинга осанки.
Что это значит для повседневных технологий
Объединив несколько режимов измерения — давление, изгиб, тепло и ближнюю дистанцию — в один тонкий и легко настраиваемый лист, эта работа приближает электронную кожу к тонким возможностям человеческой кожи. Хотя есть пространство для улучшения характеристик при очень высоких нагрузках и для автоматизации некоторых сборочных операций, подход уже демонстрирует, что богатое осязание можно добавить в роботов, игрушки и другие устройства без тяжёлого ручного оборудования. На практическом уровне это может привести к домашним роботам, которые безопаснее обращаются с хрупкими предметами, медицинским носимым устройствам, более комфортно отслеживающим контакт с телом, и интерактивным продуктам, которые реагируют на наше прикосновение гораздо более естественно.
Цитирование: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Ключевые слова: электронная кожа, осязательное восприятие, гибкие датчики, роботический захват, интерактивные устройства