Clear Sky Science · ru
Сравнение стратегий управления клиностатом для достижения имитированной микрогравитации с равномерным распределением вектора тяжести
Почему земным ученым важна невесомость
Космос по-разному влияет на живые организмы: от ослабления костей и мышц до изменений в иммунных клетках. Чтобы понять эти эффекты, исследователям нужно подвергать клетки, растения и мелких животных воздействию невесомости в течение часов, дней или даже недель. Но полеты в космос дорогостоящи и редки. В этой статье рассматривается, как улучшить настольный прибор — клиностат — для более точного имитирования микрогравитации на Земле, чтобы лабораторные эксперименты лучше соответствовали тем, что проводятся на Международной космической станции.
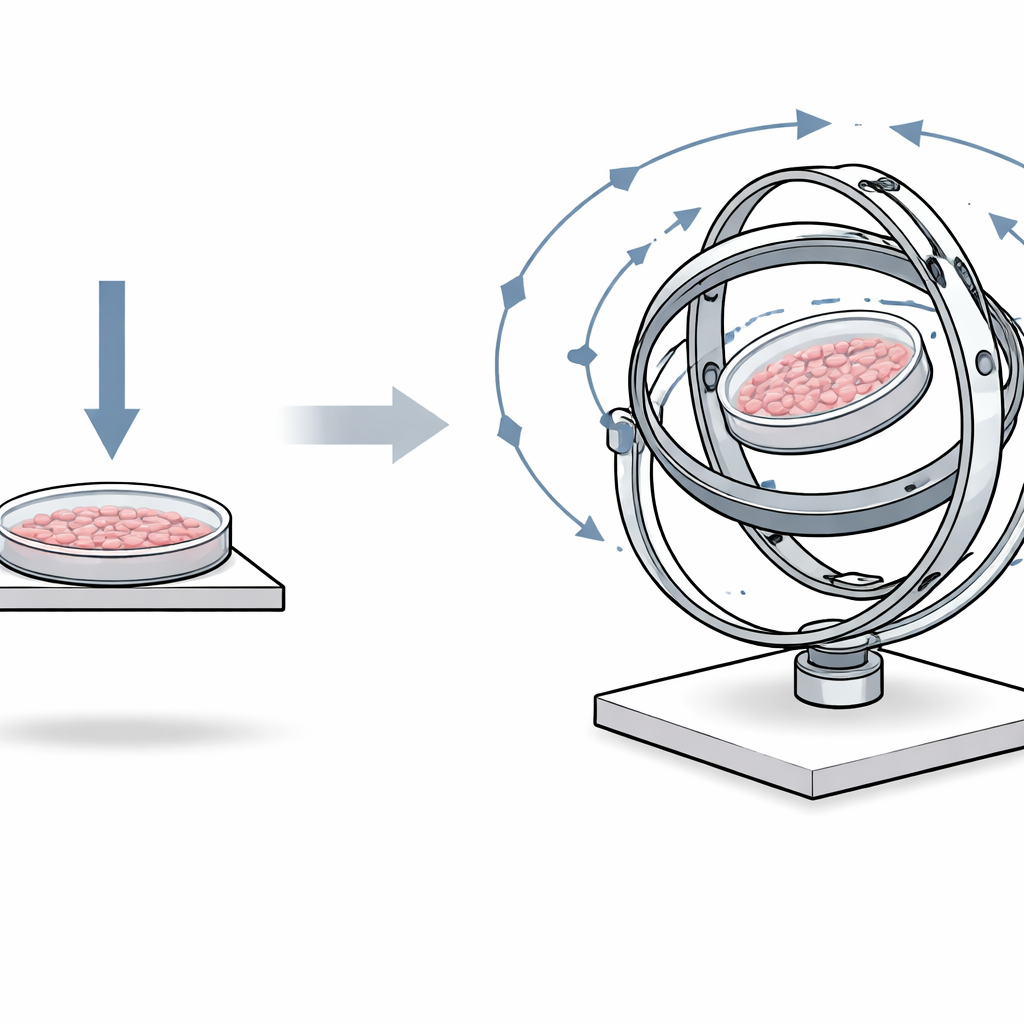
Создаем иллюзию невесомости вращением
Клиностат пытается «выключить» гравитацию не удалением, а постоянным изменением направления её действия. Образцы крепят на небольшой внутренней платформе, которую приводят в движение два перпендикулярных мотора. По мере наклона и поворота платформы направление гравитации, воспринимаемое образцом, просматривает все возможные углы. Со временем эти меняющиеся воздействия усредняются и дают почти нулевой суммарный эффект — состояние, известное как имитированная микрогравитация в усредненном по времени смысле. Предыдущие исследования показали, что клетки и растения в таких условиях могут вести себя очень похоже на поведение в реальном полете, поэтому клиностаты — ценные инструменты для космической биологии.
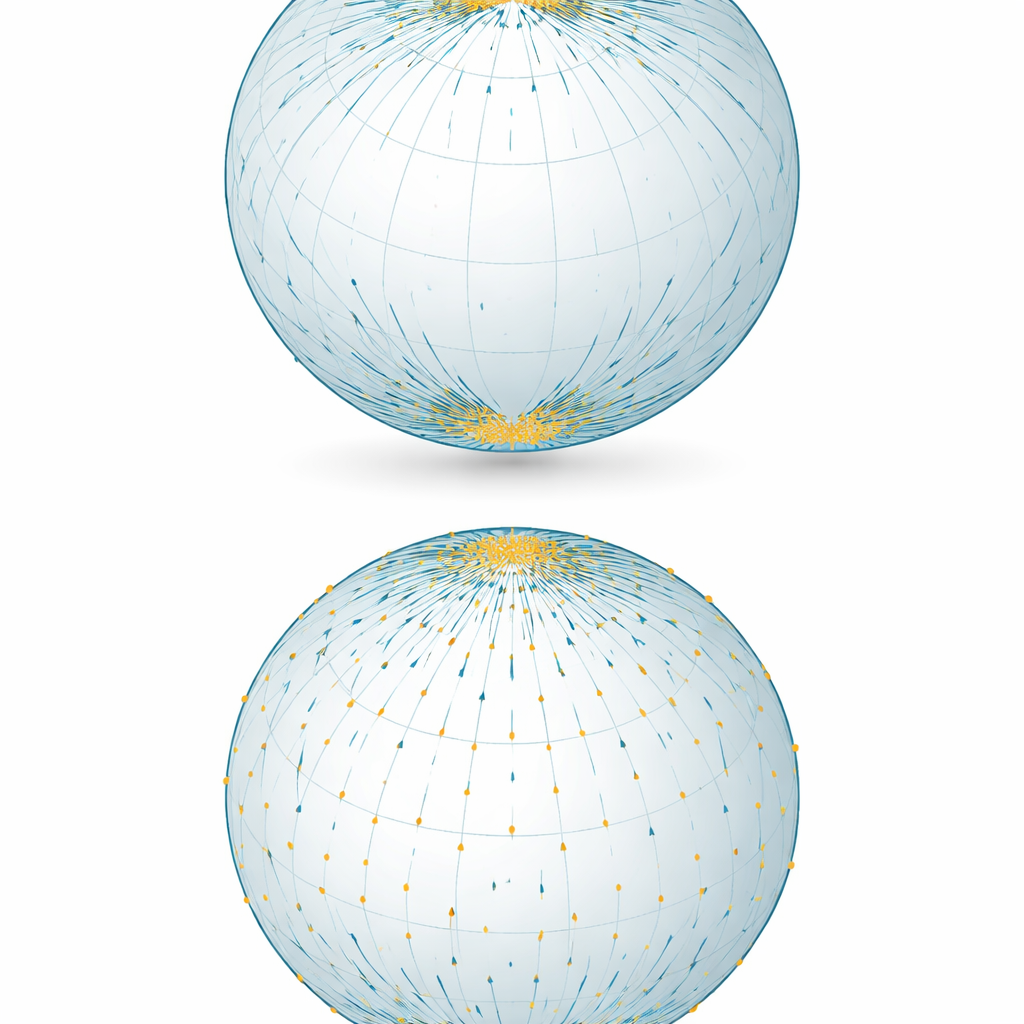
Скрытая проблема «горячих точек» гравитации
Однако есть загвоздка. Из-за геометрии вращающихся рамок видимое направление гравитации распределяется неравномерно по всем углам. Когда внешний мотор вращается с постоянной скоростью, направление гравитации проводит слишком много времени около двух противоположных областей на воображаемой сфере всех ориентаций. Эти «полюса» становятся горячими точками гравитации. Даже если средний суммарный эффект за многие часы близок к нулю, образец многократно испытывает гравитацию чаще из двух направлений, а не равномерно со всех сторон. Многие работы по клиностатам либо не учитывали эту проблему, либо пытались решить её случайной сменой скоростей, но авторы показывают, что сама по себе случайность проблему не решает.
Разработка более продуманного шаблона вращения
Команда сравнила четыре способа управления внешним мотором клиностата: постоянная скорость, случайно выбираемые скорости в некотором диапазоне, простой синусоидальный профиль, при котором скорость меняется в зависимости от угла, и специально сконструированный «обратный синусоидальный» профиль, основанный на точном изменении площади поверхности на сфере. С помощью компьютерных симуляций они отслеживали, где со временем оказывается направление гравитации, и ввели две численные метрики: насколько оно сосредоточено в полюсных областях и насколько равномерно распределено по разным «широтным» поясам на сфере. Также они измеряли, сколько времени требуется каждой стратегии, чтобы привести усредненную по времени гравитацию ниже одной тысячной земной, что является распространенным стандартом для экспериментов с имитированной микрогравитацией.
Выравнивание полюсов без утраты микрогравитации
Результаты были однозначны. Стратегии с постоянной скоростью и со случайными скоростями давали сильные полюса: направление гравитации было до примерно пятнадцати раз плотнее вблизи полюсов, чем в среднем. Случайный подход разрушал простые повторяющиеся траектории, но в целом не менял неравномерность распределения. Простой синусоидальный профиль помогал частично, но при увеличении разницы между минимальной и максимальной скоростью для ослабления полюсов он сдвигал распределение гравитации в другую сторону: некоторые средние широты стали недопредставлены, а низкие широты — перепредставлены. Напротив, обратный синусоидальный профиль — при котором мотор движется быстрее вблизи полюсов и медленнее у экватора в строго рассчитанном математическом соотношении — уменьшал концентрацию у полюсов почти до равномерного уровня при достаточном отношении максимальной к минимальной скорости. Хотя эта стратегия немного увеличивала время достижения очень низкой усредненной гравитации (около шести часов и не быстрее), для типичных экспериментов продолжительностью двенадцать часов и более эта задержка несущественна.
Проверка теории на реальном устройстве
Чтобы убедиться, что эти преимущества сохраняются вне симуляций, авторы собрали двухосный клиностат из стандартных серводвигателей и датчиков. Они задавали внешнему мотору обратный синусоидальный профиль скорости при нескольких отношениях скоростей и регистрировали движение системы двумя независимыми способами: по энкодерам моторов и по ориентации, измеренной инерциальным датчиком, установленным на вращающейся внутренней стадии. Оба метода хорошо согласовывались с симуляциями, с расхождением всего в несколько процентов. По мере увеличения отношения максимальной к минимальной скорости наблюдаемые гравитационные полюса ослабевали так, как предсказывалось. Усредненная по времени гравитация в реальном устройстве не достигла строгой цели в одну тысячную земной из‑за небольших механических дисбалансов, но поведение в течение первых нескольких часов по-прежнему отражало теоретическую тенденцию.
Что это значит для будущих земных исследований космической биологии
Для исследователей, использующих наземные аналоги полетов, вывод прост: важно не только с какой скоростью вращать клиностат, но и как именно вы это делаете. Простой постоянный режим или случайные скачки скорости оставляют скрытые горячие точки гравитации, которые могут влиять на реакции клеток и тканей. Тщательно формируя профиль вращения так, чтобы платформа быстро проскальзывала полюсные области и дольше оставалась там, где площадь поверхности больше, экспериментаторы могут дать образцам гораздо более равномерное «ощущение» всех возможных направлений «вниз». Исследование показывает, что принятие этой стратегии обратного синусоидального управления сделает эксперименты на клиностате более достоверной заменой жизни на орбите без добавления существенной механической сложности или значительного увеличения времени эксперимента.
Цитирование: Kim, Y.J., Park, S. & Kim, S. Comparison of clinostat control strategies to achieve simulated microgravity with uniform gravity vector distribution. npj Microgravity 12, 21 (2026). https://doi.org/10.1038/s41526-026-00570-8
Ключевые слова: имитированная микрогравитация, клиностат, распределение вектора тяжести, космическая биология, алгоритмы управления