Clear Sky Science · ru
Мионейронный актуатор с заданной биофизикой для имплантируемых биогибридных систем
Перестройка мышц в умные живые машины
Представьте, что врачи могли бы превратить собственную мышцу человека в живой двигатель, который не утомляется, управляется компьютером и может безопасно соседствовать с хрупкими органами годами. В этой работе описан способ сделать именно это. Исследователи создают «мионейронный актуатор» у крыс — мышцу, нервная проводка которой намеренно перестроена так, чтобы ею можно было управлять электроникой, чтобы она сопротивлялась утомлению и при этом вела себя как естественная ткань. Такие живые актуаторы однажды могут восстанавливать движение, поддерживать слабые органы или передавать реалистичные ощущения от продвинутых протезов.
Почему живые мышцы лучше роль моторов
Искусственные двигатели на электричестве, воздухе или жидкости мощные, но они тяжёлые, трудно поддаются уменьшению до размеров, удобных для тела, и сделаны из материалов, плохо совместимых с живой тканью. В отличие от них скелетная мышца лёгкая, энергоэффективная, способна к саморемонту и уже по конструкции предназначена для работы внутри организма. Она может расти, адаптироваться и реагировать на крошечные нервные сигналы. Однако при прямом управлении мышц имплантированными электрическими импульсами они быстро утомляются. Эта утомляемость возникает потому, что стандартная электрическая стимуляция обычно сначала вовлекает самые большие, быстрые, но наименее выносливые волокна. Чтобы использовать мышцу как надёжный имплантируемый двигатель, команде пришлось изменить организацию и порядок рекрутирования её нервных волокон — не жертвуя при этом естественным здоровьем и устойчивостью ткани.
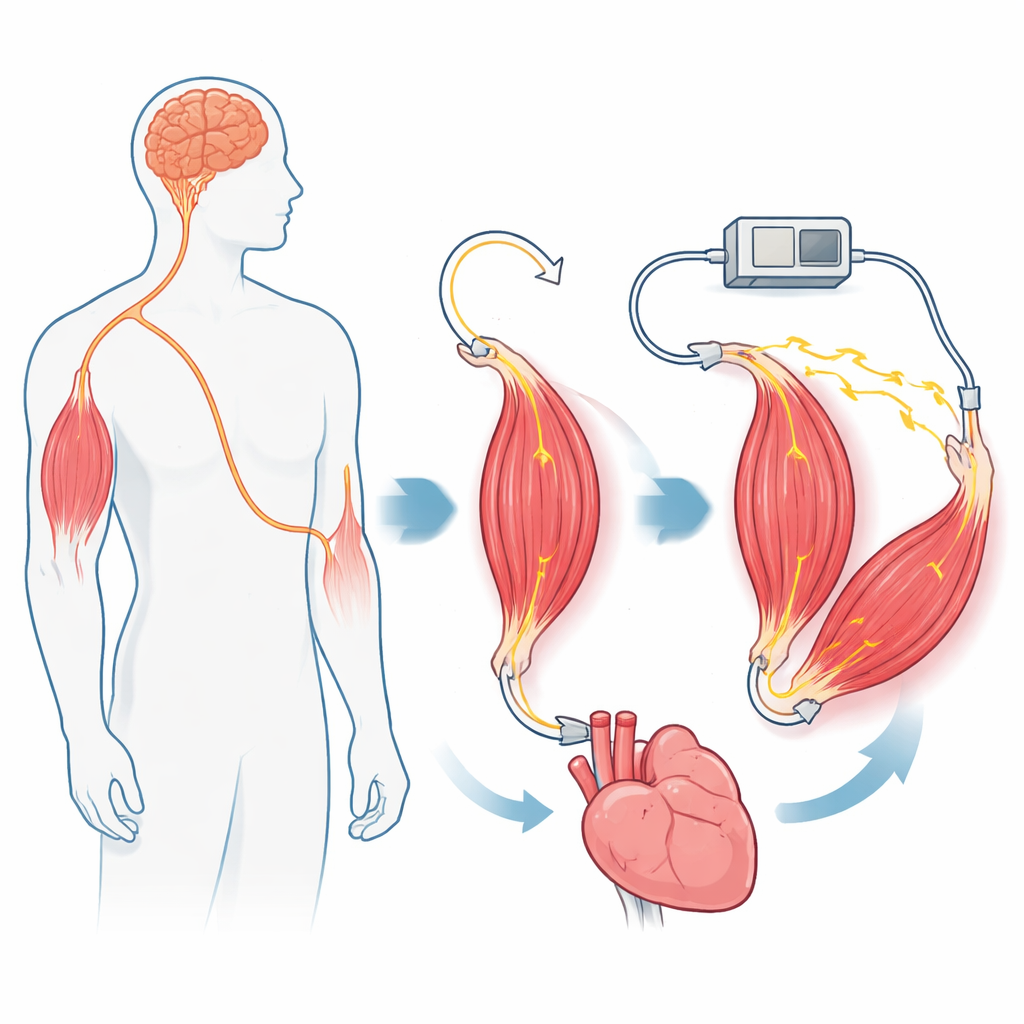
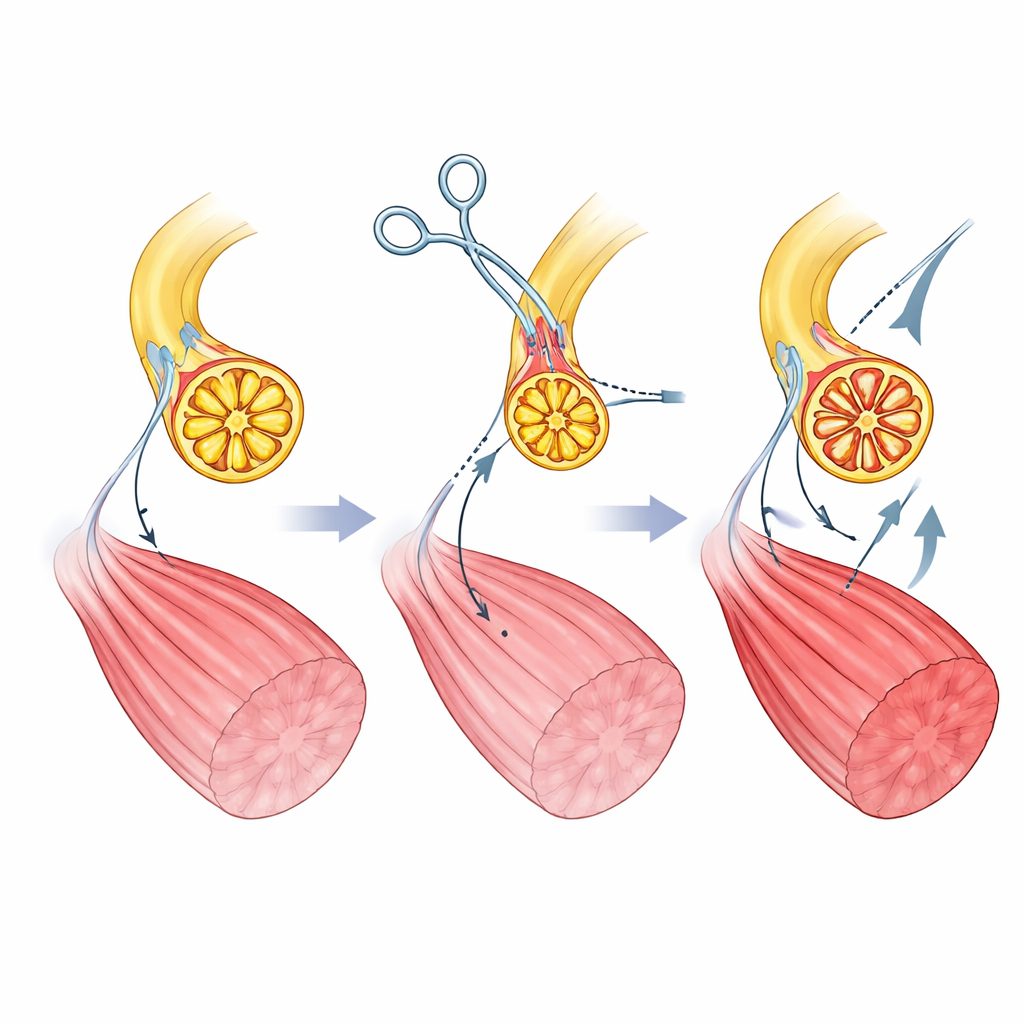
Перенаправление нервных путей для переписывания управления
Авторы создают свой мионейронный актуатор у крыс хирургическим перенастройкой иннервации мышцы ноги. Сначала они пересекают обычный двигательный нерв, который несёт команды от спинного мозга, и препятствуют его повторному отрастанию. Затем они направляют другой нерв — тот, что обычно передаёт ощущения прикосновения и растяжения от кожи и тканей — прямо в мышцу. Со временем этот «сенсорный» нерв регенерирует внутри мышцы и образует новые точки контакта с мышечными волокнами. Микроскопия показывает, что эти новые синаптические соединения выглядят и функционируют как обычные моторные, и мышца снова способна сокращаться при электрической стимуляции сенсорного нерва. Важно, что аксоны в этом сенсорном нерве более однородны и меньше по размеру, чем в исходном моторном нерве, что создаёт предпосылки для более сбалансированного рекрутирования мышечных волокон под управлением компьютера.
Мышцы, которые продолжают работать при большой нагрузке
После заживления перенастроенных мышц команда подвергла их интенсивным испытаниям. Они сравнивали родные мышцы с новыми актуаторами при повторяющихся одиночных сокращениях и в ходе длительных периодов непрерывной работы. Миотонейронные актуаторы теряли силу гораздо медленнее и демонстрировали более стабильную работу с течением времени — сопротивляемость утомлению при непрерывной нагрузке улучшилась на 260 процентов. Их поведение в течение минут заметно отличалось от неизменённых мышц: вместо быстрого падения силы, отдача снижалась более постепенно и затем стабилизировалась. Несмотря на потерю части массы во время перенастройки иннервации, актуаторы сохранили здоровую структуру волокон и выдавали сопоставимую силу на единицу массы по сравнению с родной мышцей, поддерживая своё состояние как минимум 15 недель даже без упражнений или дополнительной стимуляции.
Компьютерное управление без помех для мозга
Поскольку новая проводка нервов отключает мышцу от нормальных моторных сигналов мозга, все сокращения теперь инициируются внешним стимулятором. Исследователи встроили мышцу в контур обратной связи: датчик измеряет силу, контроллер регулирует стимуляцию нерва, и система следит за заданной целевой силой в течение множества циклов. Родные мышцы быстро выходили из строя в такой схеме, но мионейронные актуаторы продолжали следовать командным сигналам. Чтобы сделать систему безопаснее и гибче, команда также ввела обратимый «блок нерва». Наложив высокочастотный электрический сигнал на нерв ближе к спинному мозгу, они препятствуют прохождению стимуляционных импульсов обратно в центральную нервную систему, при этом позволяя стороне мышцы реагировать. В экспериментах актуатор продолжал генерировать контролируемые усилия, пока мозг оставался эффективно изолирован от искусственной стимуляции.
От бионических конечностей до помощи слабым органам
Чтобы показать возможные применения этого живого двигателя, авторы собрали две демонстрационные системы у крыс. В первой они соединили актуатор последовательно с другой мышцей, имитирующей остаток мышцы на месте ампутации. Натягивая или расслабляя эту пару, они изменяют растяжение остаточной мышцы и, в свою очередь, активность её сенсорных волокон — по сути регулируя восприятие положения и силы конечности. Этот «проприоцептивный механонейронный интерфейс» в перспективе мог бы обеспечить естественные ощущения от роботизированных протезов или виртуальных аватаров. Во второй системе они обёртывают актуатор вокруг петли тонкой кишки, заполненной жидкостью. При стимуляции нерва мышца сжимает и расслабляет сегмент кишечника, а трекинг движения показывает, что орган движется синхронно с актуатором. Это даёт представление о будущих устройствах, которые могли бы придавать механическую силу ослабленным органам — например кишечнику, мочевому пузырю или даже сердцу.
Что это может значить для медицины будущего
В целом работа демонстрирует, что при аккуратном перенаправлении нервов собственную мышцу человека можно превратить в устойчивый к утомлению, управляемый компьютером актуатор, который при этом сохраняет поведение родной ткани и при необходимости может быть электрически изолирован от мозга. Поскольку подход опирается на хирургические методы и электроды, уже похожие на клинические инструменты, его может быть легче перевести в клинику, чем полностью синтетические импланты или выращенные в лаборатории ткани. Если подобные мионейронные актуаторы удастся безопасно создать и контролировать у людей, они могут стать основой новых биогибридных систем, восстанавливающих ощущение конечностей, поддерживающих слабые органы и обеспечивающих точные механические сигналы телу без громоздкости и жёсткости традиционных машин.
Цитирование: Song, H., Herrera-Arcos, G., Friedman, G.N. et al. A myoneural actuator with engineered biophysics for implantable biohybrid systems. Nat Commun 17, 2584 (2026). https://doi.org/10.1038/s41467-026-70626-6
Ключевые слова: биогибридный актуатор, нейропротезирование, мышечная усталость, регенерация нервов, поддержка органов