Clear Sky Science · ru
Биомиметический актуатор из нанокомпозита рела́ксорного ферроэлектрического полимера
Крошечные роботы, движущиеся как настоящие насекомые
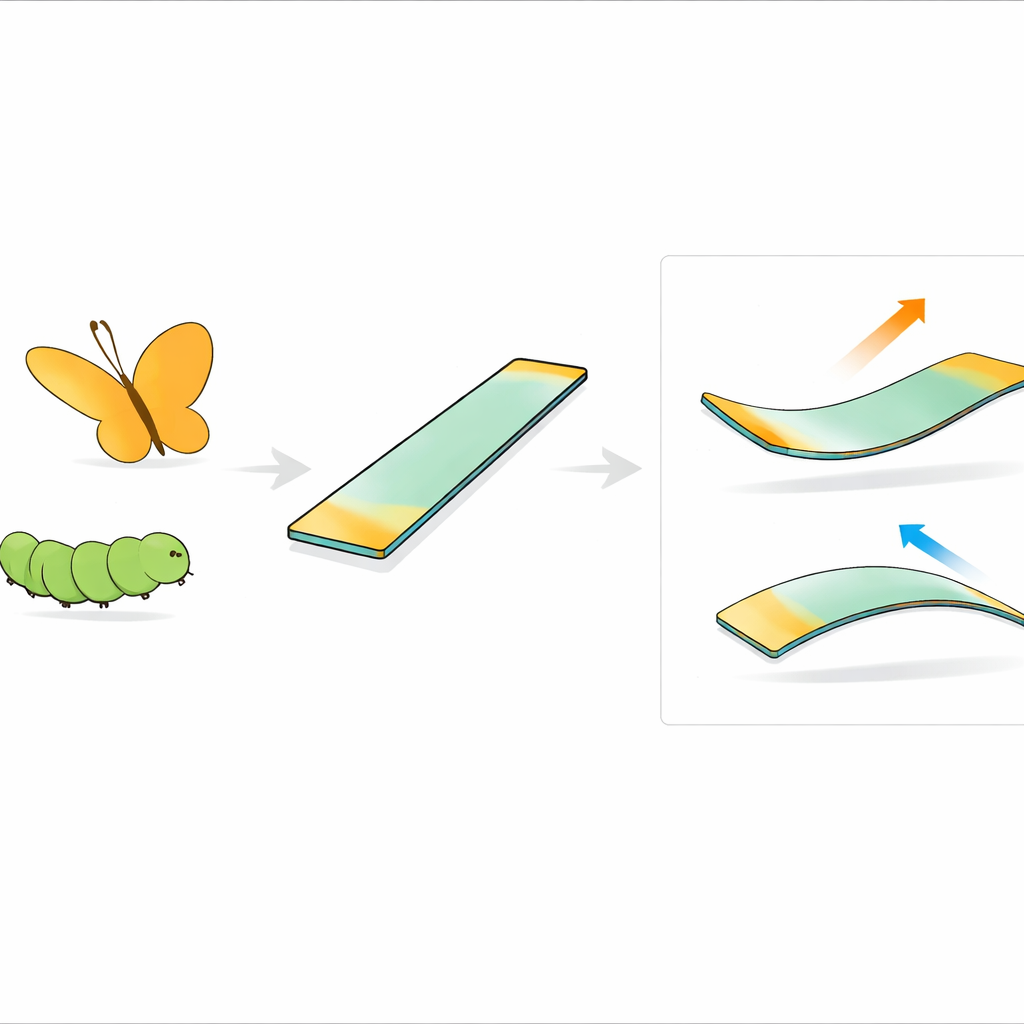
Представьте робота размером с гусеницу, который может ползать по неровной поверхности, или устройство, похожее на бабочку, махающее крыльями и взлетающее с земли — при этом состоящее из одного, бумажно-тонкого куска пластика и потребляющее меньше энергии, чем ночник со светодиодом. В этой статье описан новый тип мягкого материала, действующего как искусственная мышца, который делает подобные роботы в масштабе насекомых проще, легче и энергоэффективнее.
Почему важны маленькие мягкие машины
Миниатюрные роботы, вдохновлённые насекомыми, могли бы проникать в завалы зданий в поисках выживших, ползать по трубам для обследования инфраструктуры или незаметно мониторить посевы и леса. Чтобы работать в стеснённых и непредсказуемых условиях, они должны быть крошечными, гибкими и прочными, при этом потреблять очень мало энергии. Многие современные конструкции опираются на сложные сборки зубчатых передач, шарниров и разные материалы, которые увеличивают массу, тратят энергию и трудно поддаются дальнейшему уменьшению. Авторы утверждают, что идеальное решение — это один материал, способный одновременно генерировать движение и передавать его напрямую, подобно тому, как настоящая мышца работает у животных.
Умный пластик, разработанный изнутри
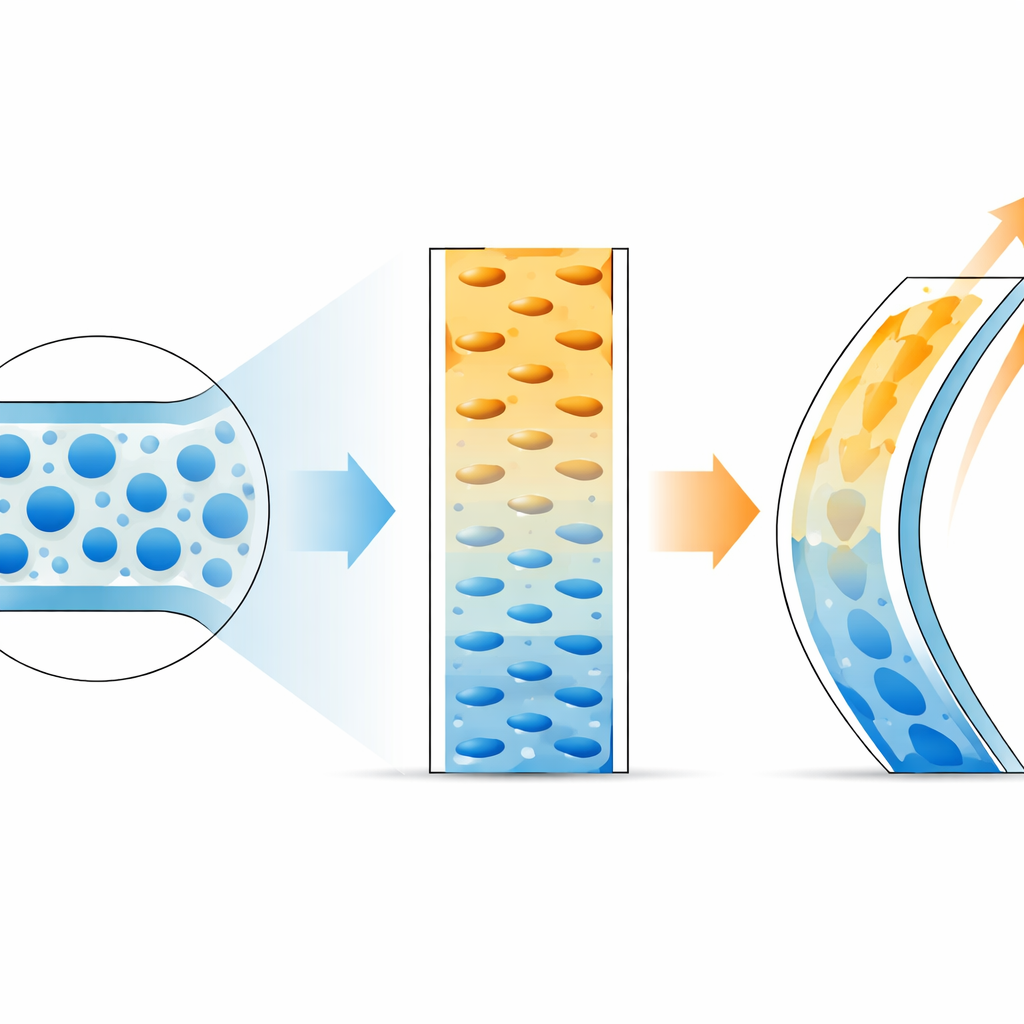
В основе работы лежит тонкая плёнка пластика на базе хорошо известной семьи материалов PVDF, уже ценимой за способность деформироваться под воздействием электрического поля. Исследователи смешивают этот пластик с крошечными «полимерными точками», наномасштабными частицами, покрытыми химическими группами, способными образовывать водородные связи. При литье смеси в плёнку и её аккуратном контролируемом нагреве растворитель испаряется быстрее сверху, чем снизу. Такое неравномерное высыхание вместе с водородными связями побуждает полимерные цепи у нижней поверхности выстраиваться в высокоупорядоченное, полярное состояние, тогда как верх остаётся менее организованным. В результате по толщине однослойного материала формируется встроенный внутренний градиент.
От скрытой структуры к мощному движению
Этот тонкий структурный градиент даёт заметный механический эффект. При приложении электрического поля более упорядоченная, сильно полярная нижняя область реагирует сильнее, чем верхняя, поэтому одна сторона листа расширяется больше другой. Этот дисбаланс заставляет полоску изгибаться, напоминая классический биметаллический элемент в термостате, но здесь это происходит в полностью органической гибкой плёнке толщиной всего в десятки микрометров. Тщательные измерения показывают, что плёнка может изменять длину примерно до 14 процентов и аккумулировать плотности механической энергии, сопоставимые с жёсткими керамическими актуаторами — при этом она остаётся мягкой и лёгкой. По сравнению с иначе идентичной плёнкой без полимерных точек или градиентной обработки новый материал обеспечивает в несколько раз больший удлинение и значительно эффективнее превращает электрическую энергию в движение.
Создание ползущей гусеницы и летающей бабочки
Чтобы продемонстрировать практическое применение материала, команда вырезает из плёнки формы, напоминающие насекомых, и добавляет простые углеродные электроды и тонкие медные опоры. Одна конструкция похожа на небольшую гусеницу с широкой серединой и заострёнными концами; при подаче переменного электрического поля полоска изгибается в ритмичном шаблоне и ползёт по ребристому треку со скоростью в несколько тел в секунду, потребляя всего несколько милливатт. Вторая конструкция имитирует бабочку с активной центральной зоной и гибкими крыльями. Подобные электрические сигналы заставляют крылья быстро махать и поднимать устройство на несколько миллиметров от платформы, даже неся грузы до двадцати раз тяжелее собственного веса — и всё это при массе актуатора примерно 50 миллиграммов.
Что это означает для будущих крошечных роботов
Исследование показывает, что при тщательном управлении внутренней организацией пластика от одной поверхности к другой можно создать один ультратонкий лист, который сильно изгибается под электрическим полем и способен приводить в движение сложные, реалистичные движения. Хотя текущие устройства всё ещё требуют относительно высоких напряжений, их крайне низкое энергопотребление и перьевой вес делают их перспективными элементами для будущих роботов в масштабе насекомых и умных устройств. При дальнейшей доработке для снижения рабочего напряжения подобные плёнки однажды могут позволить создавать флоты крошечных автономных машин, которые ползают, машут крыльями и изучают окружающий мир, используя искусственные мышцы толщиной с волос.
Цитирование: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Ключевые слова: мягкая робототехника, искусственные мышцы, полимерные актуаторы, роботы в масштабе насекомых, электроактивные материалы