Clear Sky Science · ru
Декодирование движений фантомного конечности по интраневральным записям
Новые способы двигаться с отсутствующей ногой
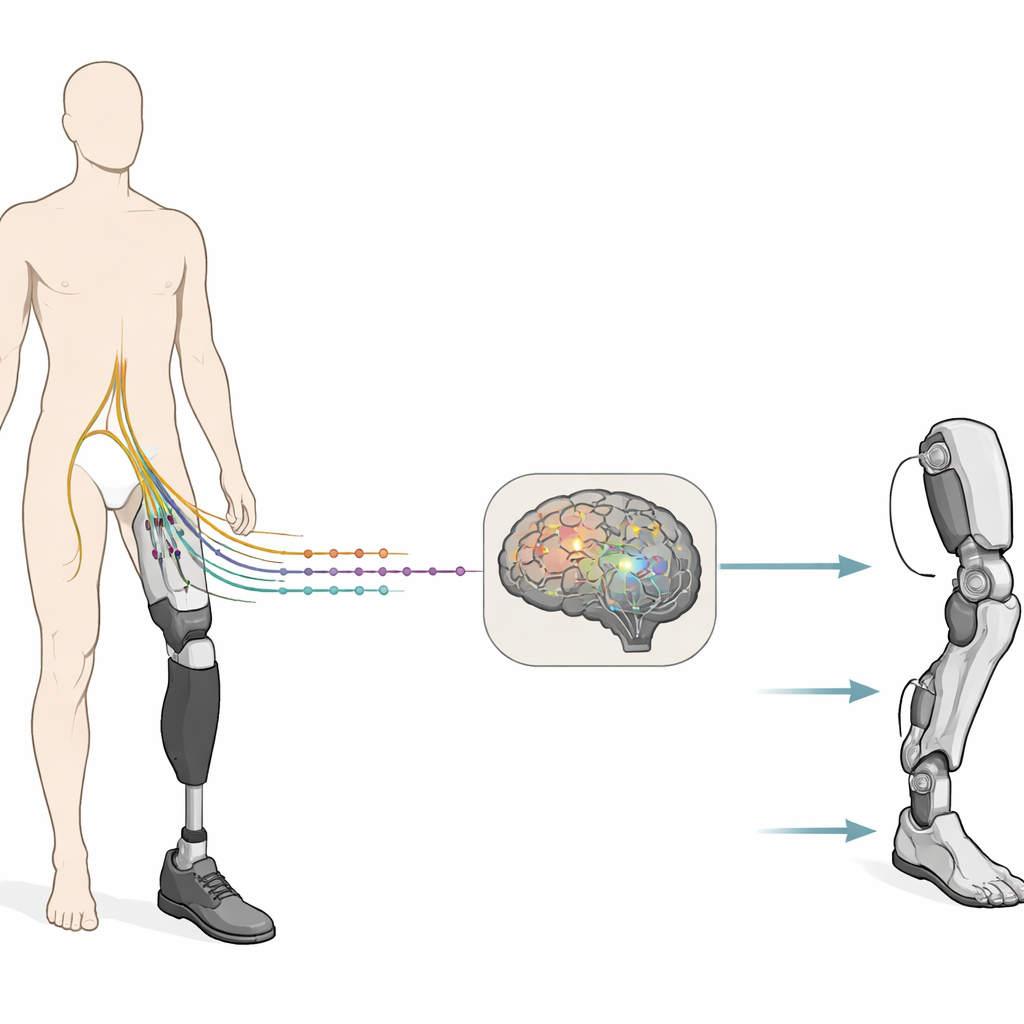
Для людей, потерявших ногу выше колена, ходьба с протезом часто больше похожа на управление жёсткой машиной, чем на движение собственной части тела. В этом исследовании рассмотрен иной путь: прямое «прослушивание» оставшихся нервов ноги, когда ампутанты пытаются двигать своей «фантомной» конечностью, и использование этих сигналов для управления будущей бионической ногой. Подключаясь к той же проводке, которой когда-то пользовался мозг для управления коленом, лодыжкой и пальцами, исследователи показывают, что естественное и интуитивное управление искусственной ногой может оказаться достижимым.
Прослушивание нервов внутри бедра
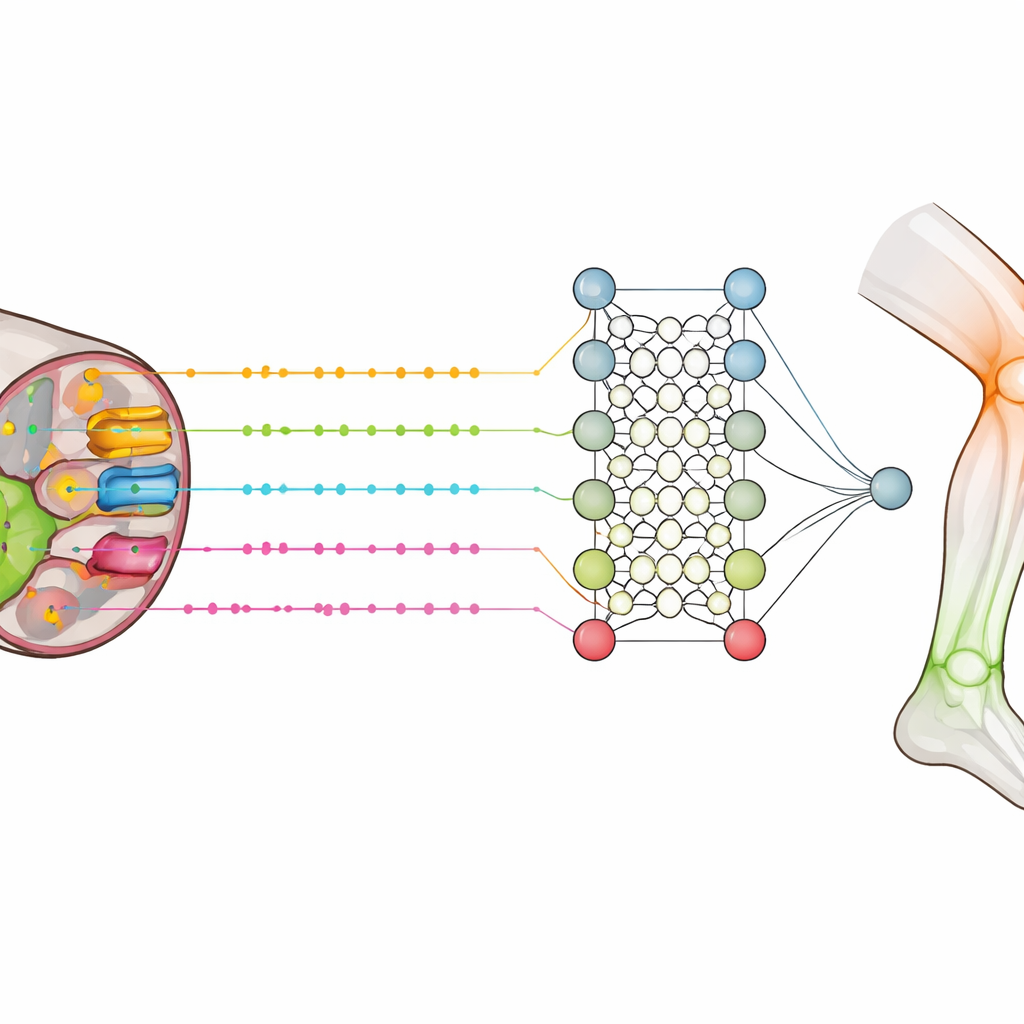
Команда работала с двумя добровольцами, у которых нога была ампутирована выше колена, но которые по‑прежнему отчётливо ощущали и «двигали» свою фантомную конечность. Хирурги имплантировали четыре тонких полосковых электрода внутрь ветви седалищного нерва в задней части бедра. Каждая полоса содержала несколько крошечных записывающих контактов, всего 56 каналов. Когда участники сидели и по команде напрягали или разгибали фантомное колено, лодыжку или пальцы, электроды улавливали всплески электрической активности от нервных волокон, которые некогда управляли мышцами, теперь отсутствующими после ампутации.
Призрачные движения оставляют реальные электрические следы
Хотя нижняя часть ноги была утрачена, попытки её сдвинуть вызывали чёткие и структурированные сигналы в нерве. Большинство записывающих контактов реагировали хотя бы на один тип движения, и многие различали сгибание и разгибание. Одни электроды были более настроены на движения колена, другие — на лодыжку или пальцы, что отражает, как разные группы мышц связаны с нервом. Сила и временная организация нервных всплесков различались от сустава к суставу, что говорит о том, что исходная «карта» управления ногой сохраняется в оставшемся нервном пучке. Исследователи также обнаружили, что эти моторные паттерны хорошо согласуются с анатомией: каналы, активировавшиеся при конкретном движении, как правило, соответствовали тем мышцам, которые обычно бы выполняли это движение.
Обучение декодера, вдохновлённого мозгом
Фиксация нервной активности — лишь половина задачи; будущий протез должен быстро преобразовывать эти сложные сигналы в команды. Учёные обратились к спайковой нейронной сети, типу искусственной сети, который обменивается краткими электрическими импульсами, подобно настоящим нейронам. Сначала они преобразовали сырые нервные записи в плотные поезда спайков, подчёркивающие изменения мощности сигнала во времени. Эти спайктрейны подавались на компактный декодер, который научился классифицировать их в классы движений, такие как сгибание лодыжки или разгибание колена. По сравнению со стандартными методами машинного обучения, спайковый декодер оказался одновременно точнее и эффективнее, надёжно распознавая несколько намерений движения по коротким фрагментам нервной активности.
Комбинирование нервных и мышечных сигналов
Поскольку электроды располагались между мышцами бедра, они также улавливали слабые мышечные сигналы в низкочастотном диапазоне. Применив фильтрацию записей, команда смогла отделить мышечную активность от более быстрых нервных спайков. Когда декодер обучали только на мышечных сигналах, производительность улучшалась по сравнению с использованием только высокочастотных нервных данных. А лучше всего сказывалось объединение обоих источников — нерва и остаточной мышечной активности — особенно для движений колена и лодыжки. Это указывает на то, что одна имплантированная технология может считывать как нервный трафик, так и остаточную мышечную активность, обеспечивая более богатый и стабильный сигнал управления для роботизированной ноги.
Ощущение опоры во время движения ноги
Те же интраневральные электроды, которые слушали исходящие команды движения, также могли использоваться в обратном направлении: для подачи небольших электрических импульсов в нерв и вызова ощущений. В предыдущей работе с этими участниками стимуляция через имплантаты вызывала тактильные ощущения на подошве стопы и пальцах. В настоящем исследовании учёные сопоставили, где моторные записи и тактильные ощущения перекрываются. Они выяснили, что нервные волокна, связанные с движением и ощущением, в основном разделены на уровне бедра, что может помочь конструкторам назначать одни контакты преимущественно под моторную декодировку, а другие — под сенсорную обратную связь, снижая взаимные помехи между ними.
Что это означает для будущих бионических ног
Для неспециалиста ключевое сообщение заключается в том, что «провода» для движения утраченной ноги остаются активными и читаемыми, даже спустя годы после ампутации. Поместив тонкие электроды внутри оставшегося нерва и применив алгоритмы, вдохновлённые работой мозга, можно по моментальным наблюдениям определить, пытается ли ампутант согнуть колено, разогнуть лодыжку или сжать пальцы фантомной ноги. В сочетании с электрической стимуляцией, восстанавливающей ощущение от отсутствующей стопы, этот подход может позволить создавать протезы, которые ощущаются и движутся гораздо ближе к натуральной конечности. Несмотря на то, что работа всё ещё находится на ранней лабораторной стадии и была протестирована офлайн всего на двух людях, она закладывает важную базу для будущих протезов, напрямую подключённых к нервной системе, предлагая более интуитивное управление, лучшую устойчивость и усиленное чувство воплощённости.
Цитирование: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Ключевые слова: фантомная конечность, нейропротезирование, интерфейс периферического нерва, спайковые нейронные сети, ампутация нижней конечности