Clear Sky Science · ru
Похожий на руку автономный летающий робот для захвата и взаимодействия в воздухе
Летающие помощники, с которыми почти можно пожать руку
Представьте себе небольшой летающий робот, который может не только снимать вокруг, но и открыть дверь, подать вам напиток или сдернуть посылку с трудно доступной полки. Это исследование представляет именно такое устройство: компактный дрон, корпус которого одновременно служит рукой. Смешивая идеи из полёта птиц и человеческого захвата, авторы показывают, как воздушные роботы могут выйти за рамки пассивного наблюдения и стать активными помощниками в домах, на заводах и в поисково‑спасательных операциях.
От летающих камер к летающим рукам
Большинство современных дронов — это «летающие глаза» для съёмки, картографии или инспекций. Когда инженеры пытаются добавить роботизированные манипуляторы, чтобы дроны могли хватать или толкать предметы, машины быстро становятся громоздкими, тяжёлыми, энергозатратными и сложными в управлении — особенно в помещениях или рядом с людьми. Авторы решают эту проблему, переосмыслив сам корпус дрона. Вместо того чтобы прикручивать отдельную руку, они разработали раму, которая сама действует как рука: обвивает предметы, садится на столбы или деревья и при этом остаётся манёвренной в узких пространствах.
Тело, похожее на руку
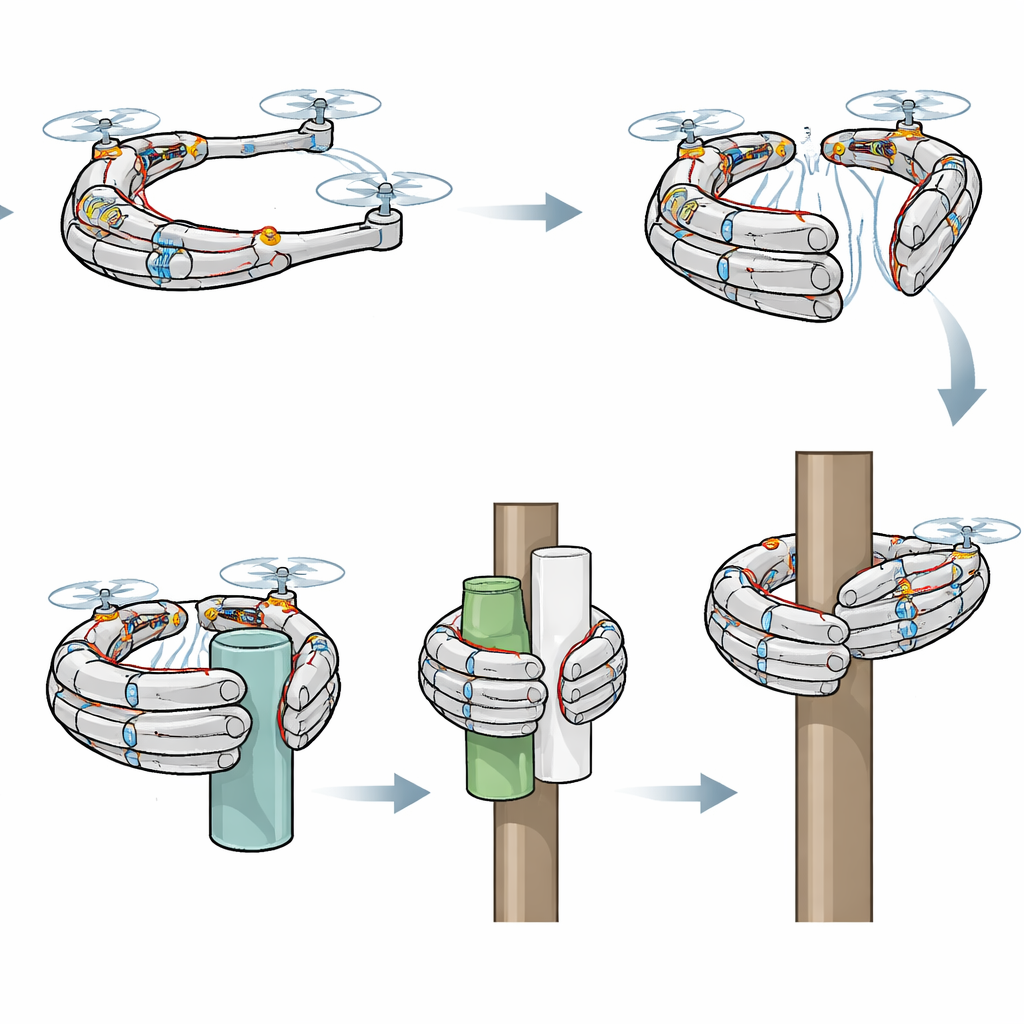
Новый робот, названный HI‑ARM, по размеру и весу близок к взрослой человеческой руке. Его каркас образует открытое C‑образное кольцо, напоминающее изогнутую ладонь с «пальцами». Внутри этой конструкции размещены выдвижные сегменты и скручивающиеся шарниры, приводимые в действие не множеством моторов, а одной «сухожильной» тягой, натягиваемой одним сервомотором. Пружины позволяют структуре сгибаться и затем возвращаться в исходную форму, аккумулируя и освобождая энергию аналогично мышцам и сухожилиям. Такая слабоактируемая конструкция даёт роботу способность подстраиваться вокруг неизвестных предметов: по мере натяжения троса разные части сжимаются и скручиваются, пока естественным образом не примут форму захватываемого объекта.
Как робот думает и летает
Чтобы это трансформируемое тело было полезным, команда создала многоуровневый «мозг» для робота. Одна часть планирует, куда дрон должен лететь и когда ему захватить, отпустить или присесть, обращаясь к библиотеке базовых действий вроде «схватить», «отпустить» или «сесть на столб». Другая часть переводит эти планы в плавные пространственные траектории, которые дрон может выполнять в реальном времени. Быстрая система управления постоянно оценивает положение робота, смещающийся центр тяжести по мере деформации и дополнительные силы при поднятии или отталкивании предметов. Адаптивные алгоритмы обнаруживают эти возмущения и автоматически усиливают или уравновешивают тягу четырёх пропеллеров, так что полёт остаётся стабильным даже когда корпус сжимает бутылку или толкает дверь.
Что умеет эта летающая рука
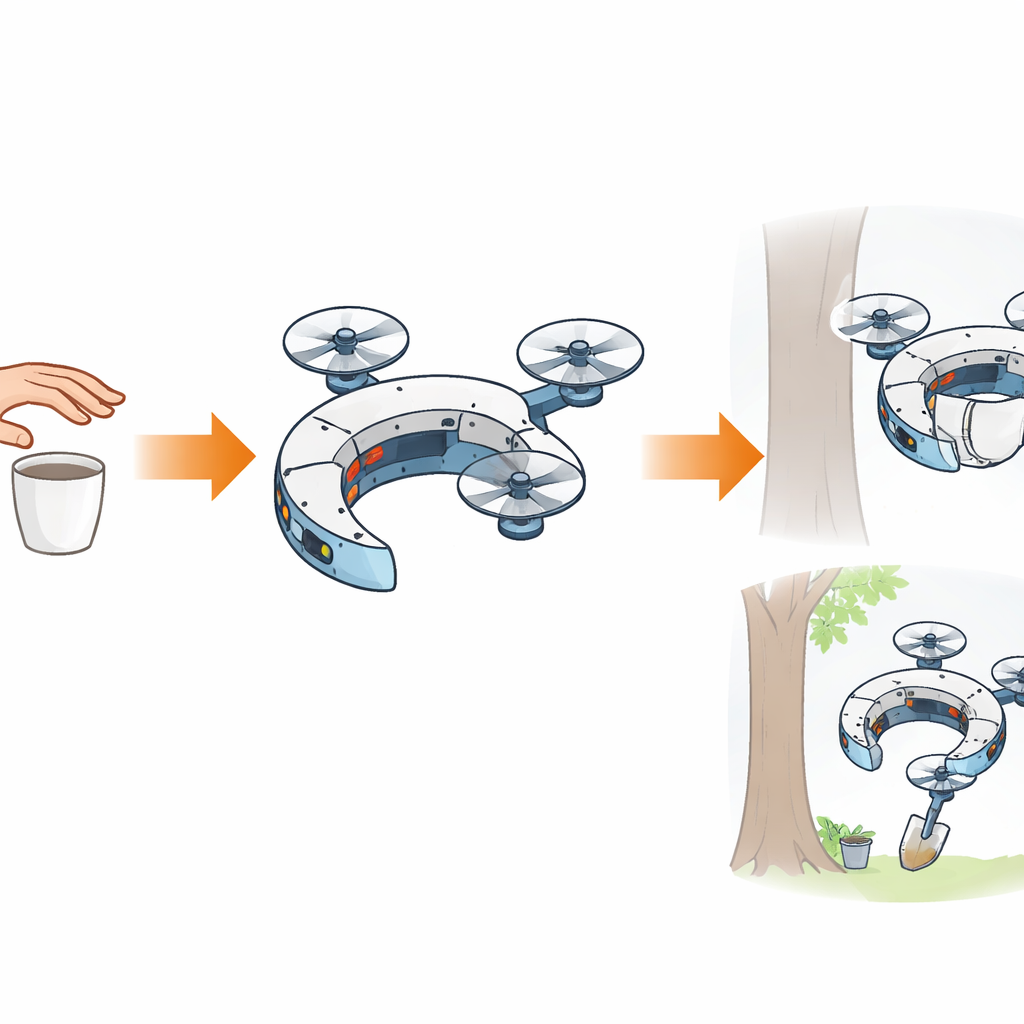
В испытаниях в помещениях HI‑ARM выполняет знакомые человечеству действия. Он использует свою «ладонь», чтобы захватить и перенести полную бутылку воды по заданной траектории, и «кончики пальцев», чтобы щипком поднять тонкую салфетку — особенно деликатная задача для машины. Тот же механизм адаптируется к игрушкам, коробкам, сумкам и необычно сформованным блокам без предварительного знания их форм. Робот может подлететь к стволу дерева или столбу, обхватить его, отключить пропеллеры и просто висеть, потребляя значительно меньше энергии, чем при зависании. Он также может подлететь к двери, обхватить ручку и открыть её, сохраняя равновесие несмотря на реактивные силы.
Помощь людям и работа на открытом воздухе
Исследователи также изучают, как такое устройство может взаимодействовать с людьми. В сцене, напоминающей домашнюю обстановку, дрон забирает посылку из рук человека, убирает её, приносит напиток со стола и передаёт его, затем собирает пустую бутылку и, наконец, садится на вешалку, чтобы дождаться следующей задачи — всё в одной непрерывной плавной последовательности. С помощью видеошлема и простого одноручного контроллера человек с ограниченной подвижностью дистанционно направляет робота, чтобы тот поднял чашку кофе на улице и принёс её обратно на расстояние в десятки метров. В outdoor‑испытаниях дрон садится на бамбук и столбы, пролезает через узкий каменный проход, уменьшая объём корпуса, и переносит напиток через реку, намекая на применение в доставке, инспекции и спасательных операциях.
Что это значит для повседневной жизни
Работа демонстрирует, что маленький, похожий на руку летающий робот может сочетать манёвренный полёт с удивительно человечными способами захвата, сидения и взаимодействия с предметами и людьми. За счёт тесной интеграции конструкции корпуса, планирования движений и адаптивного управления авторы преодолевают многие проблемы размера и стабильности, которые сдерживали ранние аэроманипуляторы. Хотя будущие версии потребуют улучшенного бортового зрения и более совершённых систем принятия решений для полностью автономной работы, это исследование указывает на будущее, где «летающие руки» могут помогать доставлять посылки, ассистировать людям с ограниченными возможностями, обслуживать инфраструктуру и выполнять деликатные задачи в местах, труднодоступных или опасных для людей.
Цитирование: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Ключевые слова: аэроманипуляция, летающая робот-рука, дроны, взаимодействие человек–робот, биомиметическая робототехника