Clear Sky Science · ru
Роботические прыжки, усиленные тягообразной гипогравитацией: точные, предсказуемые и дальние прыжки
Роботы, которые прыгают как на Луне
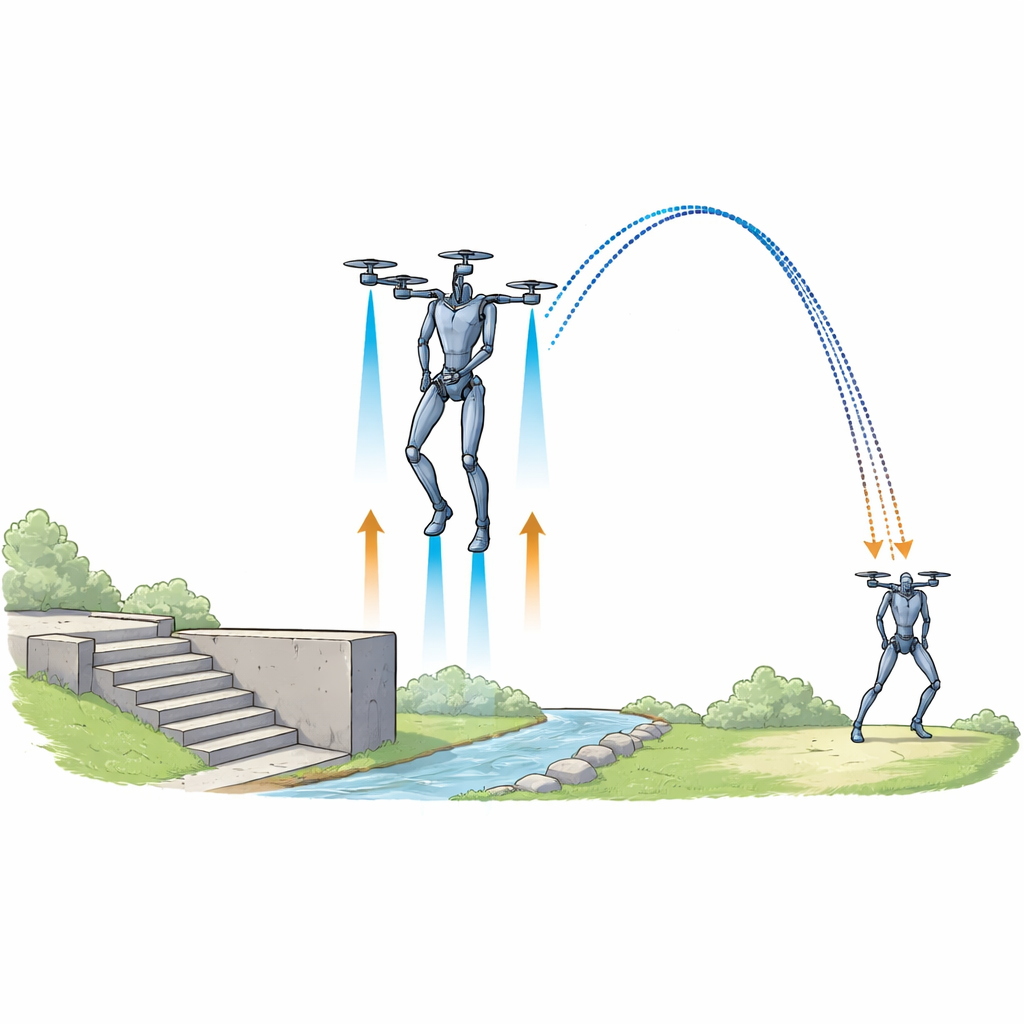
Представьте спасательного робота, который может перепрыгивать через стены, пересекать ручьи или врываться в движущееся окно, не промахиваясь при посадке больше чем на сантиметр. В этой статье описан новый тип прыгающей машины, который делает именно это, на короткое время создавая для себя «низкую гравитацию», как на Луне или Плутоне, при этом сохраняя прыжки точными и предсказуемыми.
Почему современные прыгающие роботы испытывают трудности
Животные, такие как сверчки или лягушки, могут далеко прыгать, приземляться на узкие опоры и корректировать траекторию в полёте при изменениях. Большинство роботов этим похвастаться не могут. Традиционные прыгающие роботы сталкиваются с компромиссом: они либо могут прыгать очень далеко за счёт мощных пружин или двигателей, либо приземляться точно и безопасно, но редко — и то, и другое одновременно. Пружинные «пускатели» накапливают много энергии, но долго перезаряжаются и плохо контролируются в воздухе. Непосредственно приводимые мотором ноги проще управляются, но им не хватает резкого импульса для очень высоких прыжков. Дополнительные крылья или винты могут увеличить время в воздухе, но часто делают траекторию неаккуратной и непредсказуемой, что проблематично, если нужно попасть в маленькую цель или увернуться от движущихся препятствий.
Имитирование низкой гравитации с помощью воздушной тяги
Исследователи создали 370-граммовый двуногий робот под названием GravOff, который обходит этот компромисс, создавая собственную среду с пониженной гравитацией. У робота пара длинных, похожих на насекомых ног с прямым приводом от моторов и четыре небольших пропеллера на широкой раме. Во время прыжка ноги дают быстрый толчок от земли, чтобы достичь высокой скорости отрыва. Одновременно пропеллеры подталкивают вверх ровно настолько, чтобы частично компенсировать земное притяжение — условие, которое авторы называют тягообразной гипогравитацией. Поскольку «эффективная гравитация» ниже, та же мощность ног отправляет робота по более высокой и длинной дуге — до 6,9 метров в высоту, примерно в 46 раз превышающей его рост — сравнимо с рекордными прыгунами, но с более мягкими скоростями отрыва и посадки.
Рисование и управление идеальной дугой
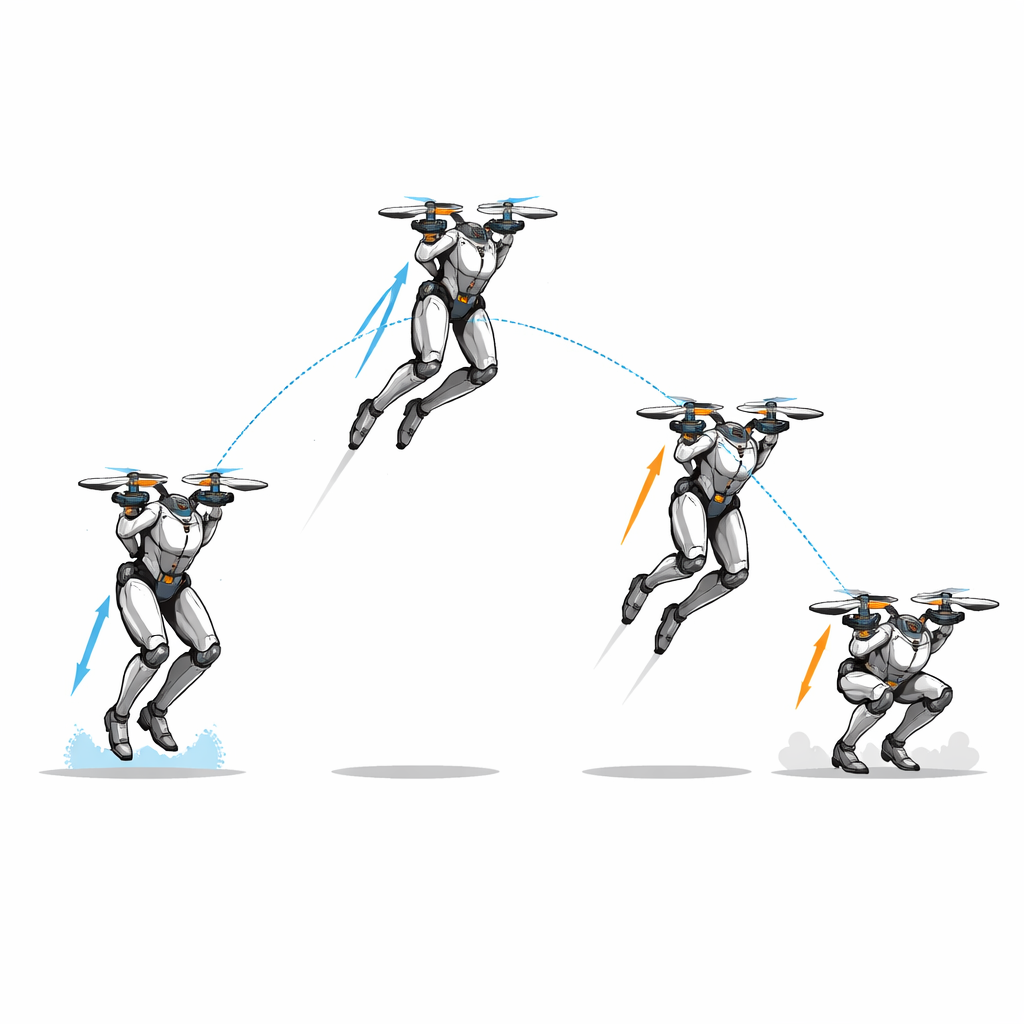
Особенность GravOff — не только дальность прыжка, но и точность следования выбранной траектории. Команда рассматривает каждый прыжок как помеченную временем дугу, где положение и время связаны, как точки на нарисованной параболе. С помощью датчиков и прогностического алгоритма управления робот сравнивает своё фактическое движение в воздухе с эталонной кривой десятки раз в секунду и слегка наклоняет свои роторы, чтобы подправить курс. Важно, что пропеллеры могут вращаться независимо от наклона корпуса робота, поэтому он может направлять тягу, не наклоняя всю раму, сохраняя баланс и руление раздельными. Такое двойное управление позволяет GravOff приземляться внутри квадрата всего 25 сантиметров в стороне с миллиметровой повторяемостью, даже если угол отрыва отличается до 15 градусов или во время полёта на него дует сильный вентилятор со скоростью 3,5 м/с.
Мягкие, устойчивые посадки без отскока
Высокие прыжки обычно означают жёсткие посадки, которые могут повредить оборудование или швырнуть робота. GravOff решает это двумя режимами посадки. Для особенно сильных ударов в каждой ноге есть мягкий амортизатор, напечатанный на 3D-принтере, который помогает рассеять энергию. Для точных посадок на маленькие или движущиеся цели робот активно втягивает ноги, а затем снова выдвигает их в нужный момент, удлиняя время контакта с землёй. Эта «активная демпфировка» уменьшает ударные силы в четыре раза по сравнению с пассивной посадкой и почти гасит входящий импульс, так что робот останавливается при первом касании, вместо того чтобы отскочить.
От лабораторных прыжков к реальным миссиям
Помимо контролируемых испытаний в помещении, авторы показывают, что GravOff умеет комбинировать прыжки с ползанием и катанием, чтобы справляться с реальной местностью. Он может медленно ползти по траве, песку, булыжнику и рифлёной плитке, выстраивая безопасную позу для отрыва, а затем использовать гипогравитационные прыжки, чтобы преодолевать препятствия, такие как многоступенчатая лестница, стена высотой 2,35 м или трёхметровый ручей. Стратегия низкой гравитации также оказывается значительно более энергоэффективной, чем чистый полёт для преодоления средних препятствий: в некоторых тестах прыжки использовали менее одной десятой энергии, необходимой для зависания или полёта над тем же барьером.
Что это значит для будущих роботов
Проще говоря, эта работа демонстрирует, что роботы могут прыгать дальше, точнее и безопаснее, если «притворяться», что гравитация слабее, и корректировать траекторию уже после отрыва. Дизайн GravOff даёт представление о будущих аппаратах, которые могли бы перепрыгивать через завалы при спасательных операциях или пересекать скалы и кратеры на других планетах, при этом точно предсказывая, где и когда они приземлятся. Те же идеи — компенсация гравитации тягой и управление дугой в полёте — можно добавить в многие другие прыгающие роботы, потенциально превращая прыжки в надёжный, планируемый режим передвижения, а не в рискованный последний вариант.
Цитирование: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Ключевые слова: прыгающие роботы, гипогравитация, векторирование тяги, ногатая локомоция, управление траекторией