Clear Sky Science · ru
Биоинспирированная спайковая архитектура обеспечивает кодирование прикосновений при ограниченной энергии
Почему умное осязание важно для роботов
Наши кончики пальцев позволяют нам почувствовать зернышко песка, стакан, скользящий из рук, или легкий прикосновение за доли секунды и при этом расходуют удивительно мало энергии. По мере того как роботы выходят из заводов в дома, больницы и людные рабочие пространства, им понадобится аналогичное чувство осязания, чтобы безопасно взаимодействовать с людьми и хрупкими объектами. В этом исследовании представлена новая искусственная кожа и система обработки, вдохновленная мозгом, которая позволяет машинам с высокой точностью определять точку прикосновения при крайне низком энергопотреблении — ключевом требовании для будущих мобильных и совместных роботов.
Гибкая кожа, похожая на нашу
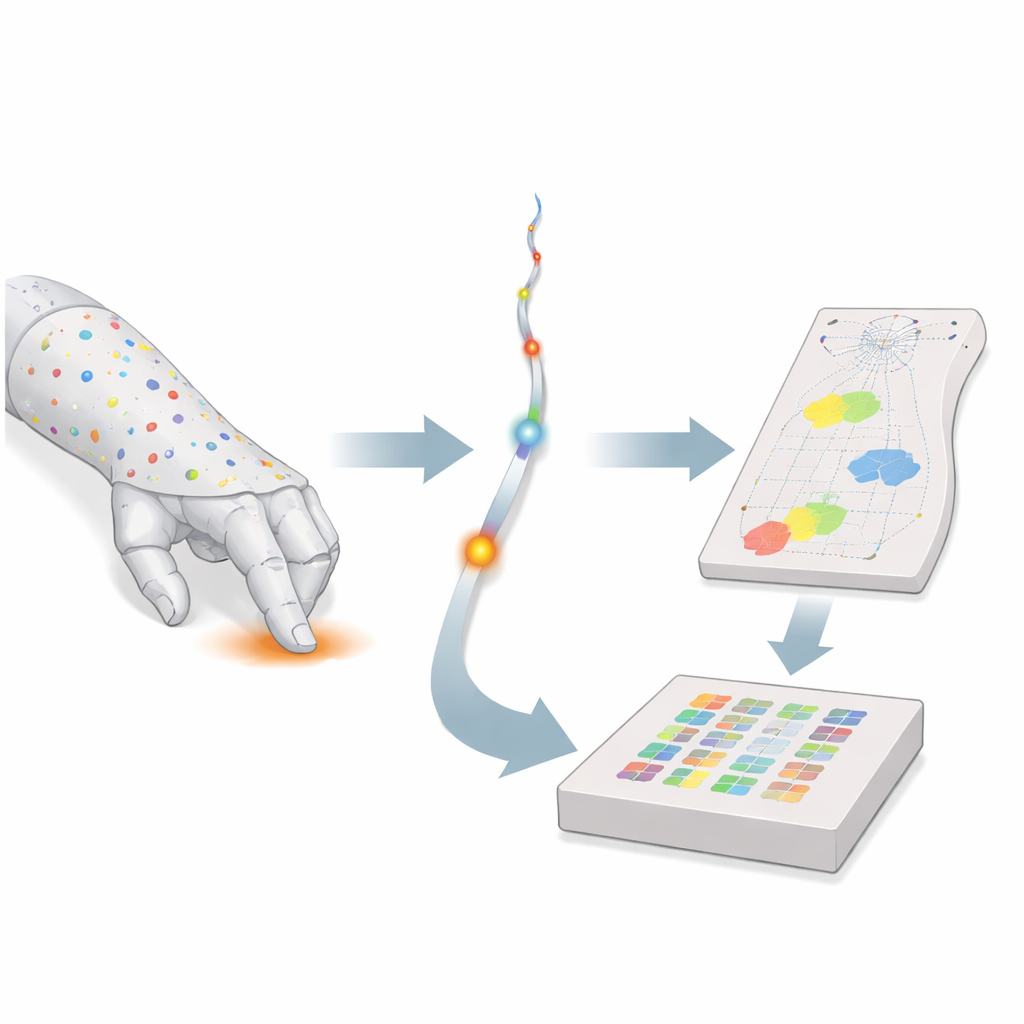
Исследователи создали мягкую силиконовую «э-кожу», формой напоминающую человеческое предплечье, и встроили в нее 21 крошечный оптический датчик вдоль одной тонкой волокны. Эти датчики, называемые решетками Фибера-Бракка (Fiber Bragg Gratings), реагируют на растяжение и изгиб кожи смещением цвета отражаемого света внутри волокна. Поскольку волокно проложено под поверхностью, каждый датчик чувствителен не только к одной точке, но к небольшой области, подобно тому, как рецепторы осязания распределены по нашей коже. Некоторые из этих искусственных рецепторов сильно реагируют на очень локальное давление, тогда как другие дают более широкую реакцию на деформации — отражая то, как различные нервные окончания в человеческой коже улавливают как мелкие детали, так и общую форму.
Преобразование прикосновения в электрические спайки
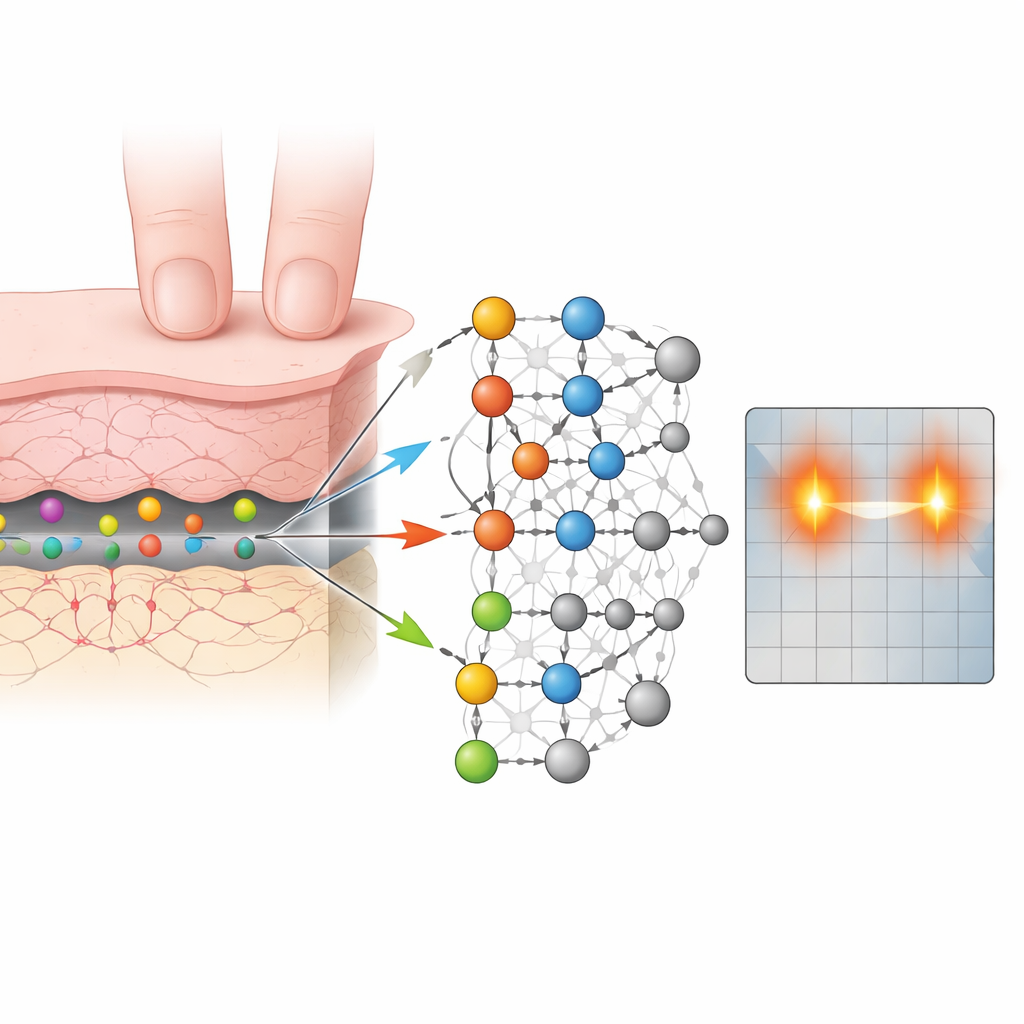
Чтобы интерпретировать этот богатый поток данных, команда не использовала обычные модели глубокого обучения, обрабатывающие кадры чисел. Вместо этого они ближе подражали биологии, применив спайковую нейронную сеть, где информация передается короткими электрическими импульсами, или «спайками», аналогичными нервным сигналам. Оптические сигналы с э-кожи преобразуются в потоки спайков и подаются в сеть. Каждый выходной нейрон этой сети представляет собой конкретную точку на коже, формируя двумерную внутреннюю карту поверхности. Когда что-то касается э-кожи, кластер нейронов генерирует спайки в паттерне, который показывает, где произошло прикосновение, а система вычисляет координату прикосновения по центру этой активности.
Более четкое осязание при меньших ресурсах
С помощью этой конструкции система локализует одиночные точки прикосновения на искусственном предплечье с типичной погрешностью около трех миллиметров, что примерно на треть превосходит сильный базовый метод глубокого обучения и обеспечивает примерно десятикратно лучшую пространственную разрешающую способность, чем можно было бы ожидать по расстоянию между датчиками. Она также работает при одновременных нажатиях в нескольких точках — до четырех контактов одновременно — и при ручных нажатиях с переменной силой и направлением. Исследователи изучили разные схемы внутренней проводки сети и обнаружили, что макет, вдохновленный ранними путями осязания в спинном мозге — где возбуждающие клетки питают тормозные интернейроны, подавляющие соседние выходы — особенно важен для повышения пространственной четкости. Эта «латеральная ингибиция» помогает сохранять представление резким, предотвращая размывание, когда контакты находятся близко друг к другу.
Создано для низкого энергопотребления, а не только для точности
Главная цель работы — держать энергопотребление под контролем, что становится критичным, если сенсорами покрыто всё тело робота. Команда обучала сеть при нарастающем давлении сократить количество спайков, имитируя потребность эволюции жертвовать «сырая» производительность ради метаболических затрат. В условиях без ограничений более гибкая, менее биологически реалистичная архитектура показала чуть лучшую производительность. Но после снижения активности спайков до энергоэффективного уровня био-вдохновленная схема оказалась выигрышной, обеспечивая большую точность при том же бюджете активности. Затем исследователи перенесли эту сеть на смешанно-сигнальный нейроморфный чип, который реализует нейроны и синапсы напрямую в аналоговой электронике. На этом оборудовании тактильная система работала при мощности субмилливатт во время прикосновения и всего в несколько микроватт в режиме покоя, при минимальной потере точности.
От лабораторных предплечий к телам будущих роботов
В целом работа показывает, что тщательное сочетание мягкого распределенного сенсинга с мозгоподобными спайковыми вычислениями может дать машинам точное и быстрое осязание без высокой энергетической нагрузки. Соответствие не только производительности, но и принципов проводки ранних путей осязания в нервной системе намекает, почему эволюция могла предпочесть определённые схемы: они обеспечивают приемлемую точность при строгих энергетических ограничениях. В увеличенном масштабе подобные э-кожи и нейроморфные процессоры могли бы позволить роботам и протезам ощущать контакт по всей поверхности, быстро реагировать на неожиданные столкновения и взаимодействовать более безопасно и естественно в сложных динамичных средах, где живут и работают люди.
Цитирование: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Ключевые слова: искусственная кожа, тактильное восприятие, спайковые нейронные сети, нейроморфное оборудование, безопасность робототехники