Clear Sky Science · ru
Обучение тактильных сенсоров передачи чувства силы друг другу
Роботы, которые чувствуют и делятся ощущением прикосновения
По мере того как роботы выходят из заводских цехов и заходят в дома, больницы и склады, им нужна способность, которую мы обычно считаем само собой разумеющейся: осязание. Так же как наши пальцы автоматически регулируют усилие при взятии чипса или тяжёлой коробки, будущие роботы должны уметь определять, с какой силой сжимать предмет и когда он начинает соскальзывать. В этой статье представлен новый способ, как «кожа» робота может изучать измерение силы, перенимая опыт у других сенсоров — это сокращает дорогостоящее калибрование и приближает машины к человеческой ловкости.
Почему так сложно правильно реализовать осязание у роботов
Современные роботы уже используют разные типы искусственной кожи. Некоторые сочетают маленькие камеры, смотрящие в мягкие гели, другие опираются на магниты или электронные сетки, регистрирующие давление. Каждая конструкция хорошо справляется с определёнными задачами, но все они говорят на разных «диалектах» осязания: одинаковое нажатие на двух сенсорах даёт очень разные сигналы. Сегодня каждый новый сенсор обычно требует собственной трудоёмкой процедуры обучения с точными динамометрами, повторяемой тысячи раз. К тому же мягкие материалы стареют и изнашиваются, поэтому эту дорогую калибровку приходится повторять при замене сенсора.
Заимствование подхода у человеческого мозга
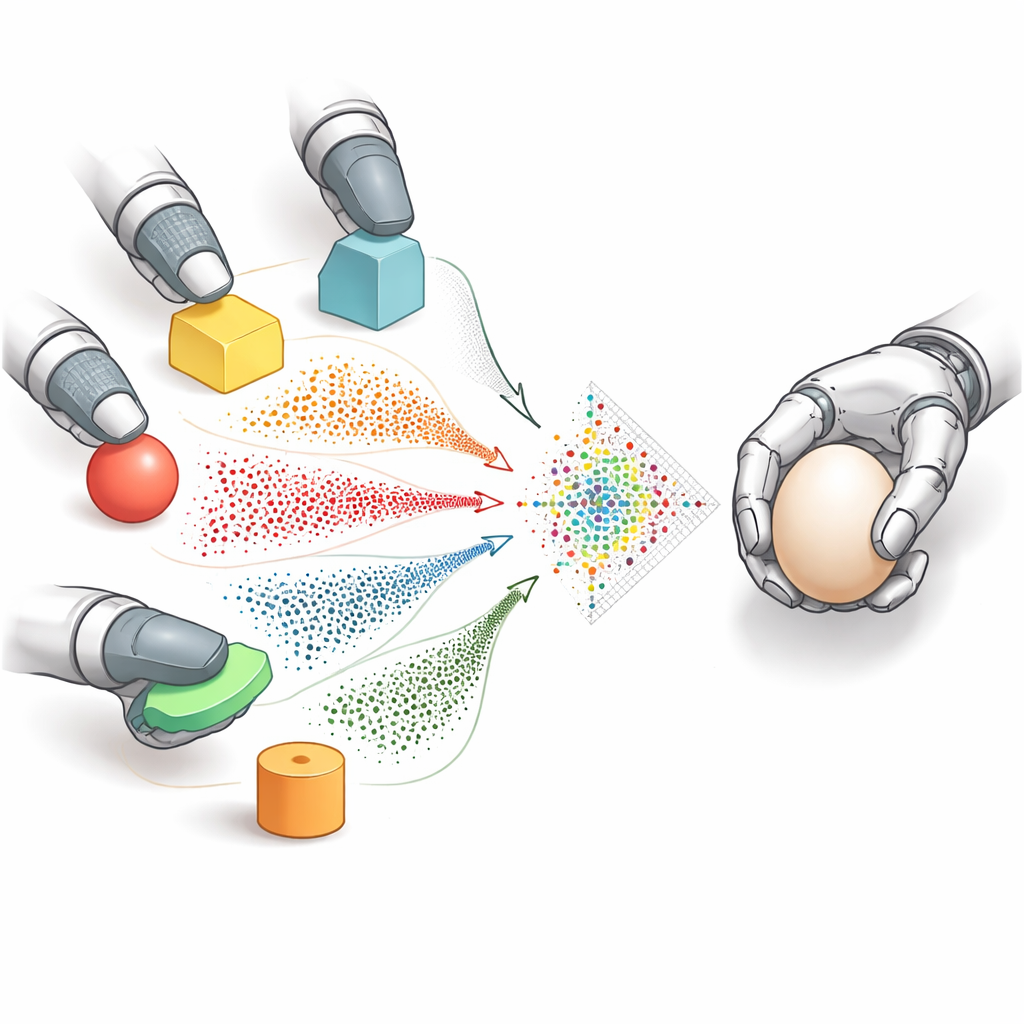
Люди решают схожую задачу без усилий. Наша кожа наполнена разными типами рецепторов, но мозг переводит все их сигналы в единый внутренний код. Эта унифицированная тактильная память позволяет нам представить, как будет ощущаться предмет на части руки, которая никогда его не трогала, опираясь на прошлый опыт. Исследователи, стоящие за этой работой, имитируют эту идею для роботов. Они преобразуют все выходные данные сенсоров — изображения камер, магнитные показания или электронные сигналы — в общую картоподобную форму из точек, которые моделируют деформацию кожи. Это общее маркерное представление служит простой «языком осязания», которым может пользоваться любой сенсор.
Обучение одного сенсора имитировать другой
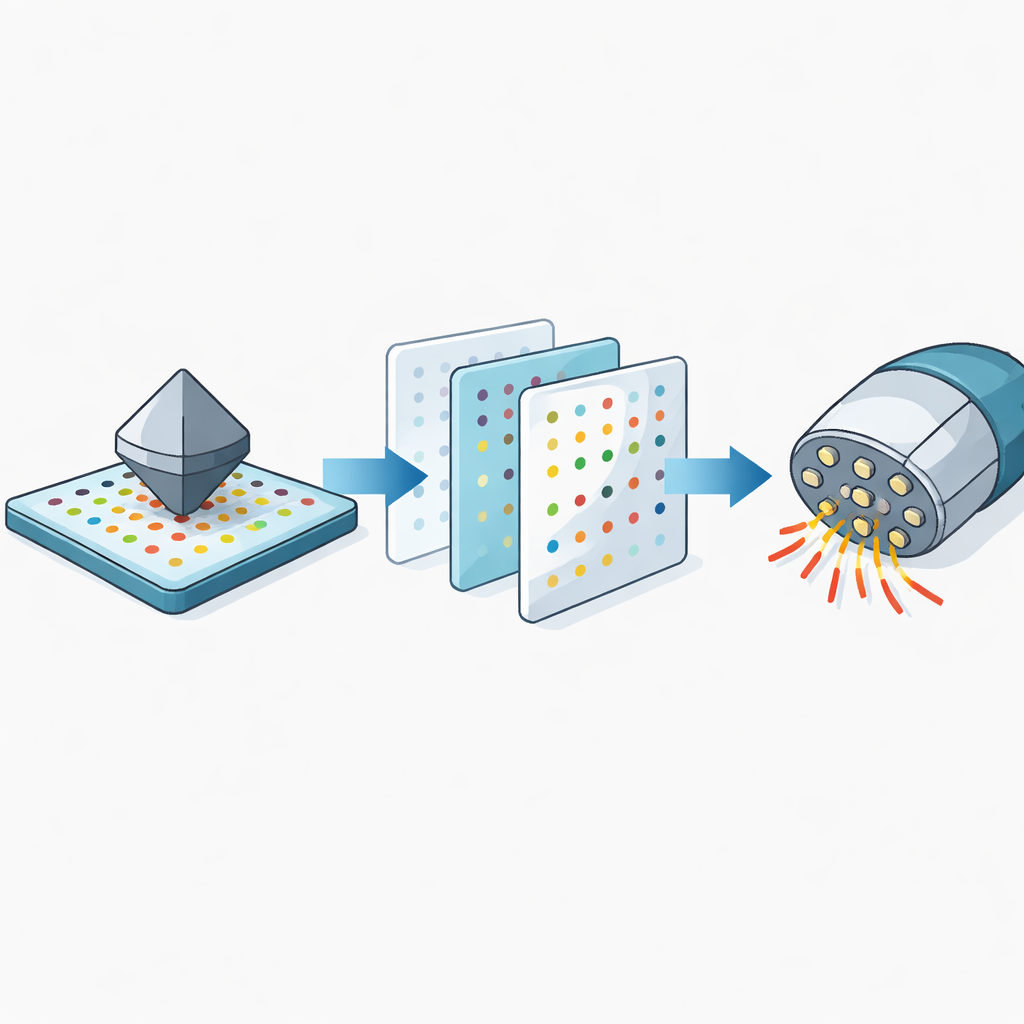
Когда все сенсоры «заговорили» на этой основе точек, команда вводит шаг перевода, называемый маркер-в-маркер (marker-to-marker) трансляцией. С помощью мощных генеративных моделей они обучают систему, способную преобразовывать шаблон точек от одного сенсора в шаблон, который показал бы другой сенсор при том же контакте. Это означает, что хорошо откалиброванный сенсор может фактически «представить», что почувствовал бы неоткалиброванный сенсор, и сгенерировать для него синтетические обучающие данные. Вторая модель затем анализирует короткие последовательности этих изображений с точками, чтобы предсказать, как силы изменяются со временем в трёх направлениях, учитывая как нажатие, так и боковое сдвиговое воздействие.
Учет реальных различий в мягкой «коже»
На практике разные роботизированные кожи отличаются не только формой и схемотехникой; они также сделаны из материалов с разной мягкостью или жёсткостью, которые меняются со временем. Эти различия могут искажать оценки силы, даже если шаблоны выглядят похоже. Исследователи измеряют, как каждый тип мягкого материала прогибается под нагрузкой, и добавляют простую коррекцию, масштабирующую метки силы вверх или вниз перед обучением. Эта компенсация материала значительно снижает ошибки, особенно при переносе знаний между очень мягкой и очень жёсткой «кожей».
От лабораторного стола к повседневной манипуляции
Команда тестирует свой метод, названный GenForce, на широком наборе сенсоров: от нескольких копий одной и той же подушки с камерой до принципиально разных конструкций с магнитами или изогнутыми, похожими на кончики пальцев, формами. В более чем 200 сочетаниях в симуляции и на аппаратуре GenForce заметно сокращает ошибки предсказания по сравнению с простым повторным использованием модели, обученной на другом сенсоре. В демонстрациях роботизированная рука с разными тактильными покрытиями на каждом пальце использует перенесённые модели, чтобы бережно хватать ломкие предметы — фрукты или чипсы — и обнаруживать и исправлять соскальзывание, координируя показания с обеих сторон захвата.
Что это значит для будущего роботизированных рук
Позволяя тактильным сенсорам учиться измерять силы друг у друга вместо того, чтобы начинать с нуля, GenForce прокладывает путь к роботизированным рукам, которые проще и дешевле масштабировать. Один тщательно откалиброванный сенсор может обучить множество других, даже с разными конструкциями, а предобученные модели можно донастраивать с использованием лишь небольшого объёма новых данных. Для неспециалистов итог прост: эта работа делает более практичным способность роботов чувствовать силу сжатия и быстро реагировать, когда предметы начинают соскальзывать, приближая нас к машинам, которые обращаются с реальным миром с такой же уверенной тактильностью, как человеческие руки.
Цитирование: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
Ключевые слова: роботическое осязание, тактильные сенсоры, измерение силы, манипуляция роботов, переносное обучение