Clear Sky Science · ru
Проект автоматизированной системы пакетной микровпрыскивания клеток на основе магнитных пинцетов для эмбрионов Danio rerio
Почему важны крошечные рыбьи яйца
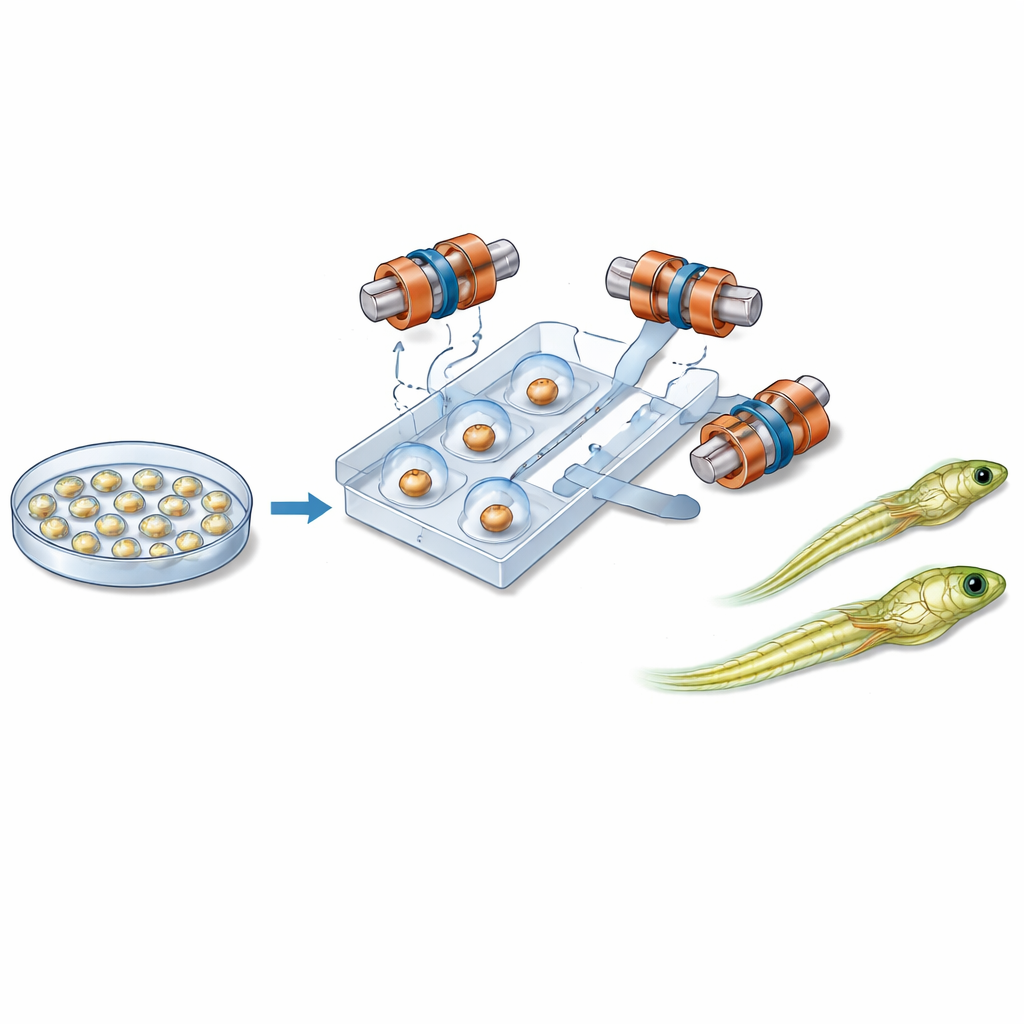
Прежде чем новые лекарства или генные терапии доходят до людей, учёные часто испытывают их на небольших быстрорастущих животных. Эмбрионы zebrafish пользуются популярностью, потому что они прозрачны и быстро развиваются, что позволяет исследователям наблюдать формирование органов в реальном времени. Но чтобы изменить их генетический материал или доставить препараты, требуется ввести в каждое хрупкое яйцо микроскопическую иглу — задача, которая обычно медленная, утомительная и сильно зависит от мастерства оператора. В этой статье представлена новая роботизированная система, способная автоматически вводить препараты партиями в эмбрионы zebrafish быстрее, бережнее и надёжнее человека, что открывает путь к более масштабным и воспроизводимым экспериментам.
Новый подход к обращению с хрупкими клетками
Традиционное микровпрыскивание требует обученного оператора, который под микроскопом ведёт стеклянную иглу, находит каждый эмбрион, поворачивает его в нужную ориентацию и прокалывает так, чтобы не повредить жизненно важные структуры. Это особенно сложно, поскольку эмбрионы представляют собой мягкие сферы с важными областями, которых следует избегать, чтобы сохранить их жизнеспособность. Существующие роботизированные системы помогли автоматизировать транспорт и прокол, но обычно не умеют полноценно контролировать трёхмерное вращение каждого эмбриона. В результате игла может входить под рискованным углом, что снижает выживаемость и ограничивает число эмбрионов, которые можно надёжно обработать. Команда авторов этой работы поставила цель создать полностью интегрированную платформу, способную перемещать, поворачивать, впрыскивать и освобождать эмбрионы в плавной последовательности, без постоянной смены объективов или ручной подстройки.
Магниты, микроканалы и деликатное управление
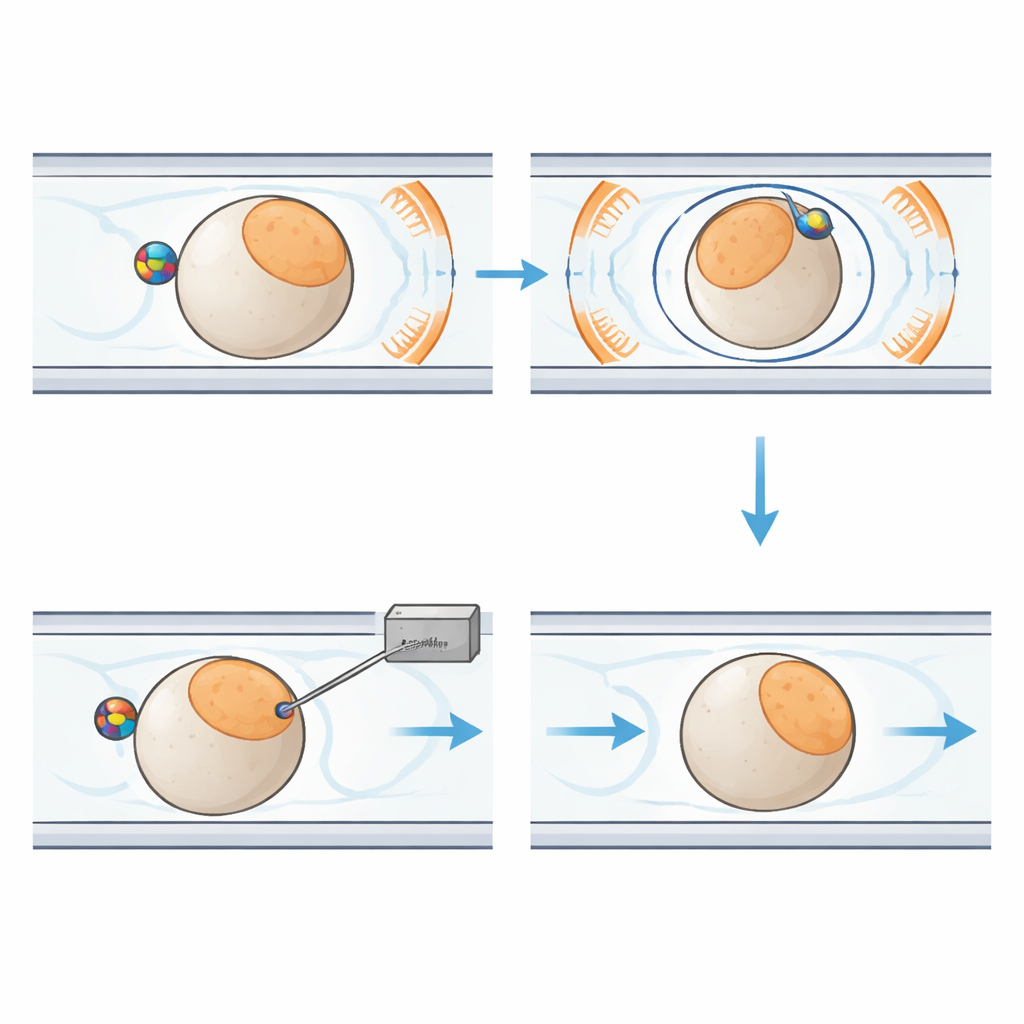
В основе новой системы — пластиновая чип-платформа размером с ладонь с узкими каналами, направляющими отдельные эмбрионы по фиксированному маршруту. Рядом с каждым эмбрионом располагается небольшая магнитная частица. Вокруг чипа шесть тщательно размещённых катушек создают однородное магнитное поле в трёх измерениях. Изменяя направление этого поля во времени, система заставляет магнитную частицу вращаться. Благодаря трению между частицей и поверхностью эмбриона весь объект поворачивается вместе с ней, как две сцепленные шестерёнки. Это позволяет роботу наклонять эмбрион вне плоскости изображения или вращать его в плоскости до тех пор, пока чувствительная область не окажется в безопасном положении относительно входящей иглы. Жидкость и аккуратное воздушное давление перемещают и фиксируют эмбрионы, а отдельный модуль управляет иглой и микропотоком генетического материала.
Чёткое видение в узком поле зрения
Чтобы реализовать эту точную хореографию, исследователи разработали продвинутую систему компьютерного зрения, названную сетью восприятия для микроскопической манипуляции. Она анализирует изображения с микроскопической камеры в реальном времени, чтобы обнаруживать каждый эмбрион, выделять тонкий наконечник иглы и различать два противоположных «полюса» яйца, где расположены ключевые структуры развития. Сеть использует современные приёмы глубинного обучения — например, двойные пути извлечения признаков, механизмы внимания, выделяющие важные детали, и многомасштабную интеграцию информации изображения — чтобы справляться с загруженным и малоосвещённым пространством внутри микрофлюидного чипа. В испытаниях на тысячах изображений она корректно детектировала объекты и сегментировала области эмбриона с примерно 98–99% точностью, обеспечивая надёжную обратную связь для управления как магнитным вращением, так и позиционированием иглы.
Доказательство работоспособности на живых zebrafish
Команда сравнила свою автоматизированную систему с опытными операторами, обработав по 100 эмбрионов zebrafish в каждой группе. Робот выполнял впрыскивания примерно за 33,8 секунды на эмбрион — более чем в два раза быстрее, чем вручную, и успешно проколол все клетки. Он также ориентировал каждый эмбрион с средней угловой погрешностью всего 2,1 градуса, что примерно вдвое точнее, чем у людей. Самое важное: 88% эмбрионов, обработанных роботом, выжили до вылупления личинок, по сравнению с 66% после ручного впрыскивания. Под флуоресцентным микроскопом личинки от автоматизированной системы светились зелёным, что свидетельствует о том, что введённый генетический материал был успешно усвоен и экспрессирован. За счёт магнитного вращения, а не механического сжатия, система минимизировала деформацию и повреждения, сохранив высокую пропускную способность.
Что это значит для будущих исследований
Проще говоря, эта работа демонстрирует, что тщательно спроектированное сочетание микроканалов, магнитного управления и интеллектуального анализа изображений может впрыскивать хрупкие рыбьи эмбрионы быстрее и с лучшей выживаемостью, чем квалифицированный специалист с традиционными инструментами. Поскольку zebrafish являются ключевой моделью для изучения развития, болезней и воздействия лекарств, надёжный высокопроизводительный инжектор может ускорить масштабные генетические скрининги и долгосрочные биологические исследования, ранее ограниченные ручным трудом. При соответствующей переделке чипа и настройке управления ту же стратегию можно адаптировать к другим типам клеток и мелким организмам, помогая превратить деликатную клеточную хирургию из ремесла отдельных специалистов в автоматизированный стандартизованный процесс.
Цитирование: Guo, X., Wang, F., Zhao, A. et al. Design of an automated cell batch microinjection system based on magnetic tweezers for zebrafish embryos. Microsyst Nanoeng 12, 113 (2026). https://doi.org/10.1038/s41378-026-01230-3
Ключевые слова: эмбрионы цыплячьей рыбки (zebrafish), микровпрыскивание, магнитные пинцеты, микрофлюидика, роботизированная манипуляция клетками