Clear Sky Science · ru
Гидрогелевые электроды для высокоточной регистрации sEMG и управления роботизированной рукой
Слушая мышцы, чтобы приводить в движение машины
Представьте, что вы управляете роботизированной рукой, просто напрягая собственные мышцы. Для людей, утративших функцию руки, или для работников, которым требуется точная роботизированная поддержка, такая естественная связь между телом и машиной может кардинально изменить жизнь. Но современные наклеиваемые металлические электроды жесткие, могут раздражать кожу и часто дают шумные электрические сигналы. В этой работе предложен мягкий, дружелюбный к коже «желеобразный» электрод, который плотно прилегает к телу, чище улавливает слабые мышечные сигналы и использует их для управления реалистичной роботизированной рукой.
Мягкая наклейка, похожая на кожу
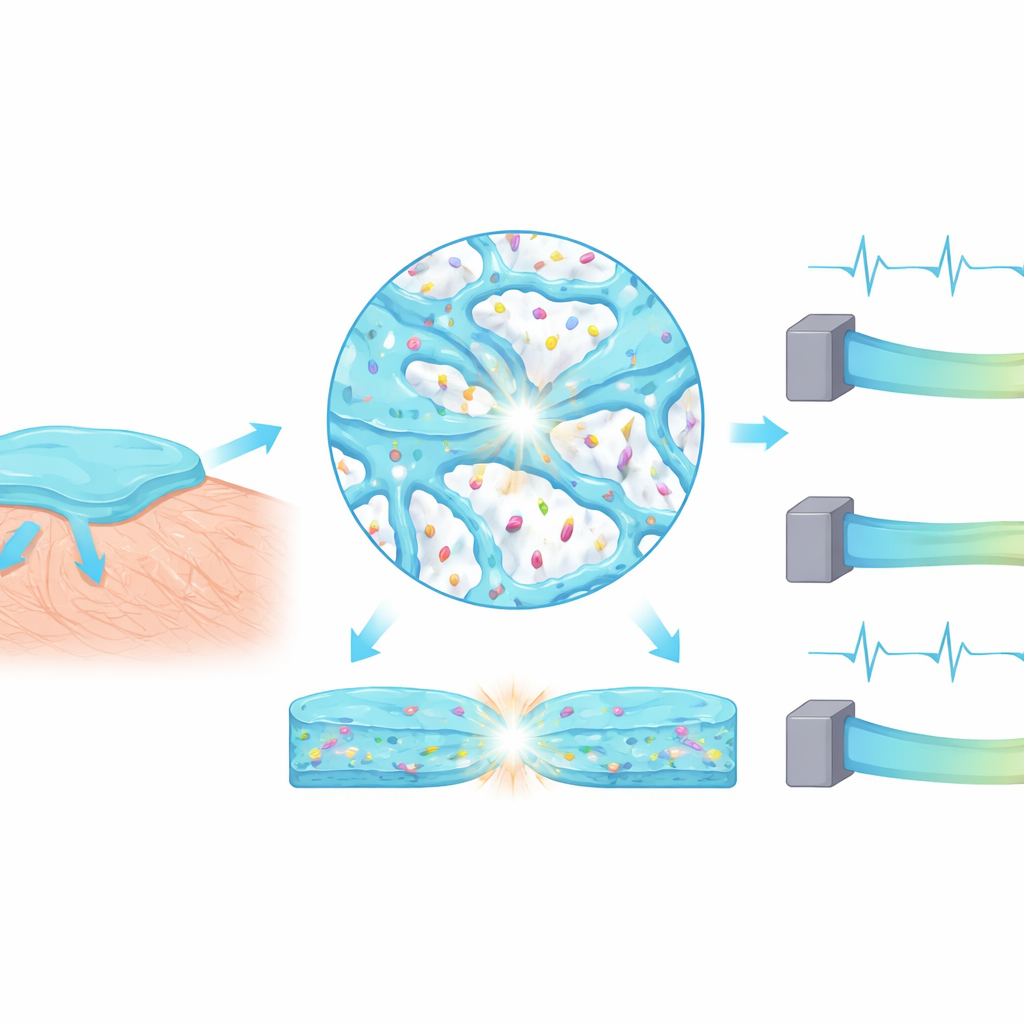
Исследователи разработали новый гидрогель — эластичный, богатый водой материал, схожий с контактными линзами, — который служит электродом на коже. Они сочетали обычные строительные блоки, применяемые в пластмассах, с натуральными добавками, такими как хитозан (получаемый из панцирей морепродуктов) и таниновая кислота (содержащаяся в растениях), а также глицерин и простые соли. В совокупности эти компоненты образуют тянущуюся ионно-проводящую сеть, способную переносить электрические заряды, оставаясь при этом мягкой и влажной на коже. Тонкая настройка соотношения компонентов позволила команде получить состав, который может растягиваться более чем в двенадцать раз от исходной длины, не разрываясь, и при этом сохранять стабильные электрические характеристики.
Прочный, липкий и способный к самозаживлению
Чтобы хорошо работать на движущейся руке или предплечье, электрод должен прочно держаться, выдерживать сгибы и растяжения и оставаться работоспособным после незначительных повреждений. Новый гидрогель превосходно справляется со всеми этими задачами. Под микроскопом он показывает плотную губчатую структуру, сформированную множеством слабых связей между молекулами. Эти связи действуют как амортизаторы: материал может тянуться, скручиваться и сжиматься, а затем возвращаться к исходной форме. Они также позволяют разрезанным кускам геля со временем срастаться; когда команда рассекла образец пополам и сжала части вместе, он постепенно восстановился и вернул почти всю исходную электрическую проводимость. Кроме того, химические группы в таниновой кислоте придают гелю сильную адгезию к множеству поверхностей — от пластика и металлов до свиной кожи и человеческой кожи — и эта липкость сохраняется даже после десятков циклов приклеивания и отрывания.
Более чистые сигналы от работающих мышц
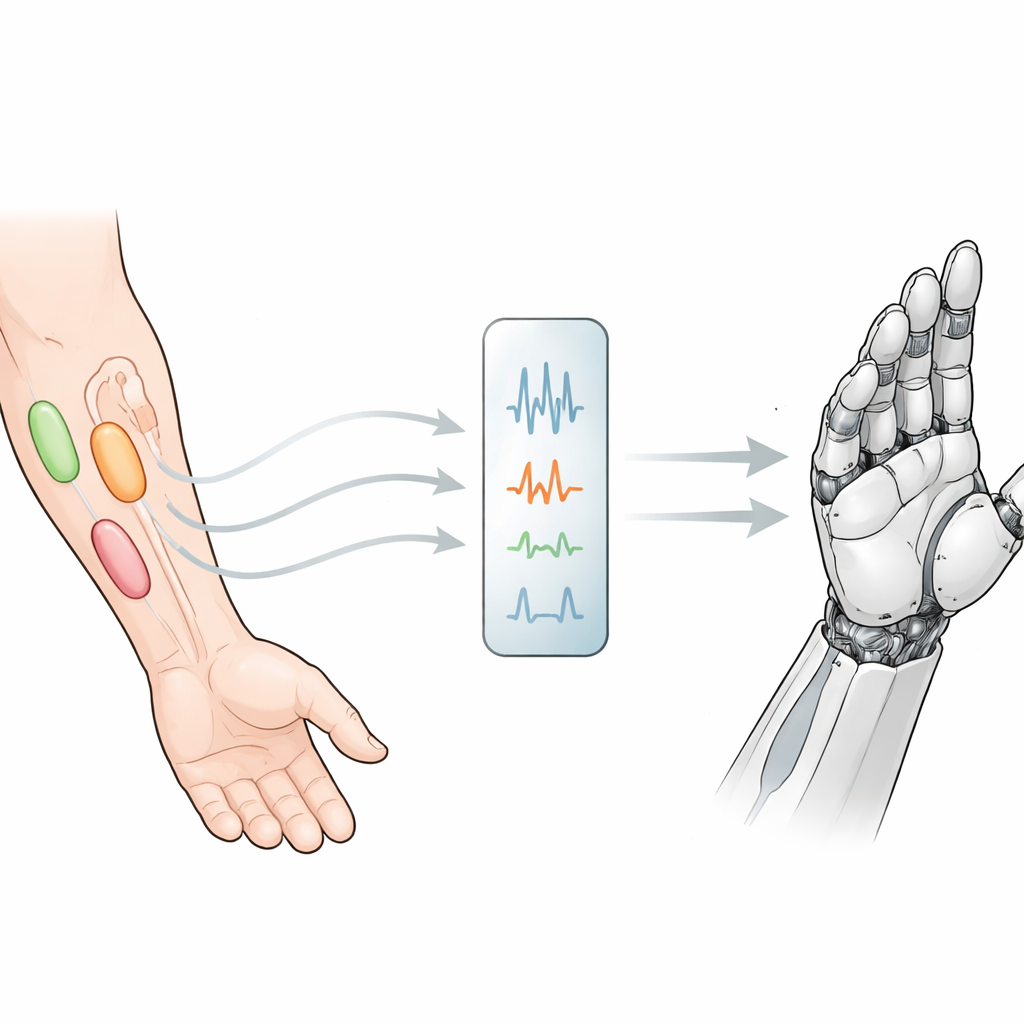
Следующим шагом было проверить, насколько хорошо мягкий гель улавливает сигналы поверхностной электромиографии (sEMG) — слабые напряжения, возникающие в мышцах под кожей. Исследователи прикрепили гидрогелевые электроды к предплечьям добровольцев и сравнили их с коммерческими подушечками из серебра/хлорида серебра того же размера. При простых задачах, таких как сжатие и расслабление кулака, оба типа электродов регистрировали четкие формы сигналов, но гидрогель обеспечивал заметно более высокое отношение сигнал/шум. На практике это означало, что искомые мышечные сигналы выделялись на фоне электрического шума более четко, а показания оставались более стабильными при смещении электродов или их повторном использовании. Даже после многократного приклеивания или преднамеренного порезания с последующим самовосстановлением гидрогелевые пластыри продолжали фиксировать сигналы высокого качества, превосходя жесткие металлические подушечки.
Обучение роботизированной руки «читать» жесты
Имея в распоряжении более чистые мышечные сигналы, команда создала полную систему, преобразующую эти сигналы в различимые жесты руки. Они установили интегрированные гидрогелевые электроды над сгибателями и разгибателями предплечья и записывали электрические паттерны, пока добровольцы выполняли пять распространенных жестов, таких как знак «ОК», поднятый большой палец, раскрытая ладонь, указание и сжатый кулак. Из этих записей исследователи извлекли простые статистические признаки — насколько сильны сигналы, насколько стабильны и как быстро они меняются — и передали их в компьютерную модель. Для обучения использовали алгоритм, сочетающий быстро обучающуюся нейронную сеть с оптимизационным методом, вдохновленным кооперативным поведением стай птиц. Такое сочетание позволило системе быстро научиться сопоставлять мышечные паттерны с жестами с высокой точностью.
От команд, похожих на мысль, к реальному движению
Наконец, команда связала программное обеспечение распознавания с биомиметической роботизированной рукой. Когда доброволец выполнял один из обученных жестов, гидрогелевые электроды захватывали sEMG-сигналы, алгоритм определял предполагаемый жест, и роботизированная рука в реальном времени воспроизводила это движение. В многочисленных испытаниях система правильно классифицировала жесты более чем в 94% случаев, несмотря на то, что опиралась лишь на небольшой набор простых признаков сигналов. Для непосвященного читателя вывод прост: мягкий, самозаживающийся и липкий гелевый пластырь может комфортнее и точнее улавливать активность мышц через кожу по сравнению с привычными металлическими подушечками, обеспечивая надежное управление вспомогательными роботами. Этот подход может лечь в основу будущих протезов рук, реабилитационных устройств и носимых приборов, которые естественно реагируют на электрический «язык» тела.
Цитирование: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
Ключевые слова: гидрогелевые электроды, поверхностная электромиография, носимые датчики, распознавание жестов, управление роботизированной рукой