Clear Sky Science · ru
Параллельно-ногий робот размером с насекомое на основе интегрированной приводно-конструктивной оригами‑механики
Маленькие роботы для узких мест
Представьте себе спасательного робота, достаточно маленького и легкого, чтобы проскользнуть через трещину в стене, проползти по узкой трубе или даже переплыть лужу. В этой статье представлен такой аппарат: размером с ладонь, насекомоподобный робот PLioBot, сделанный из одного сложенного листа, который для своих габаритов перемещается очень быстро и справляется с разными видами неровной местности. Авторы показывают, как умелая компоновка сгибов вместе с крошечными вибрационными моторами может превратить плоские материалы в ловких исследователей для стеснённых, труднодоступных мест.
От плоского листа к четырёхногому ползуну
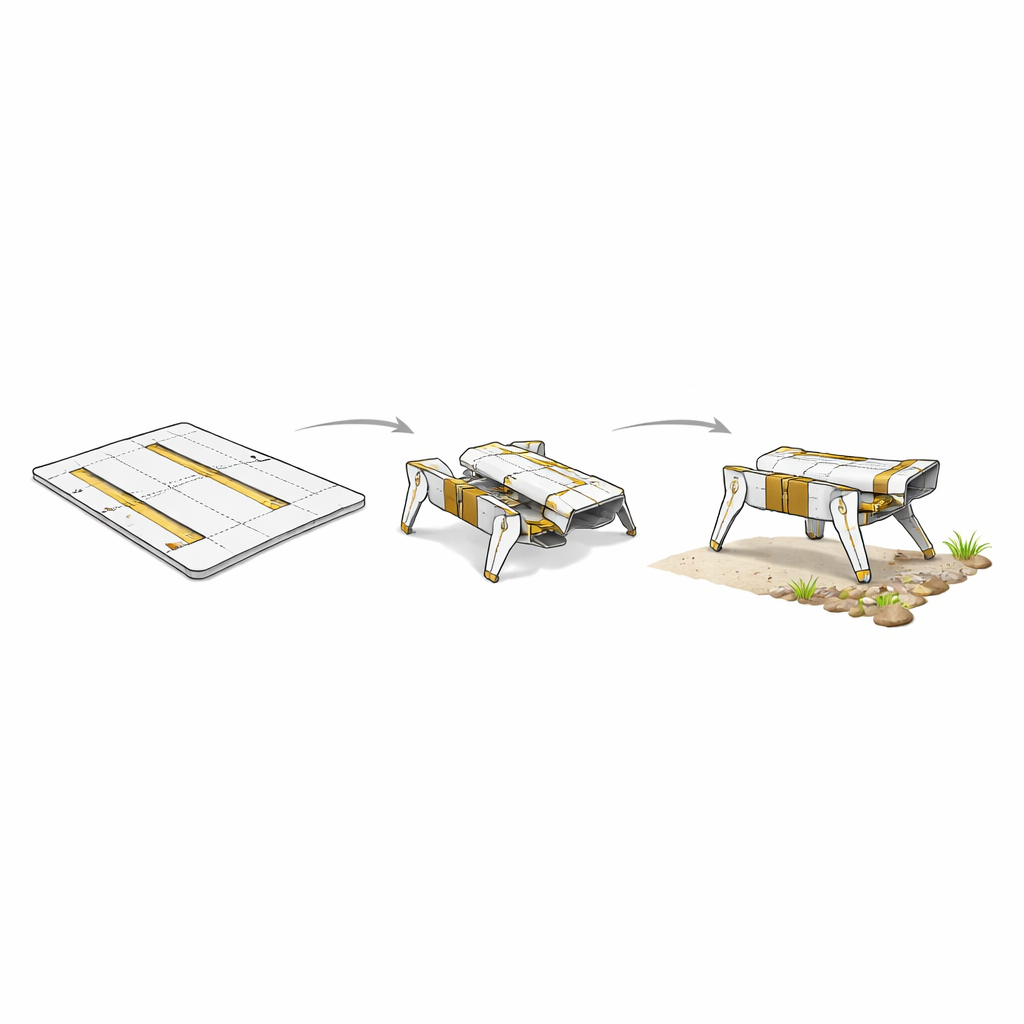
PLioBot начинается как плоский шаблон, подобно вырезанной и сложенной бумажной игрушке. Вместо бумаги шаблон выполнен в виде пятислойного сэндвича: стекловолокно, углеродное волокно, гибкая пластиковая плёнка и полоски пьезокерамики, которые служат «мышцами». Тонкие заранее обозначенные участки в пластиковом слое выполняют роль сгибов. После лазерной резки вся структура складывается в тщательно продуманной последовательности так, что корпус, четыре ноги и все восемь актуаторов формируются из одного непрерывного куска. Никаких винтов, отдельных моторов или ручной подгонки — только сгибание, в результате чего получается готовый робот длиной около 2,5 сантиметра и массой всего 1,2 грамма.
Как крошечные ноги делают большие шаги
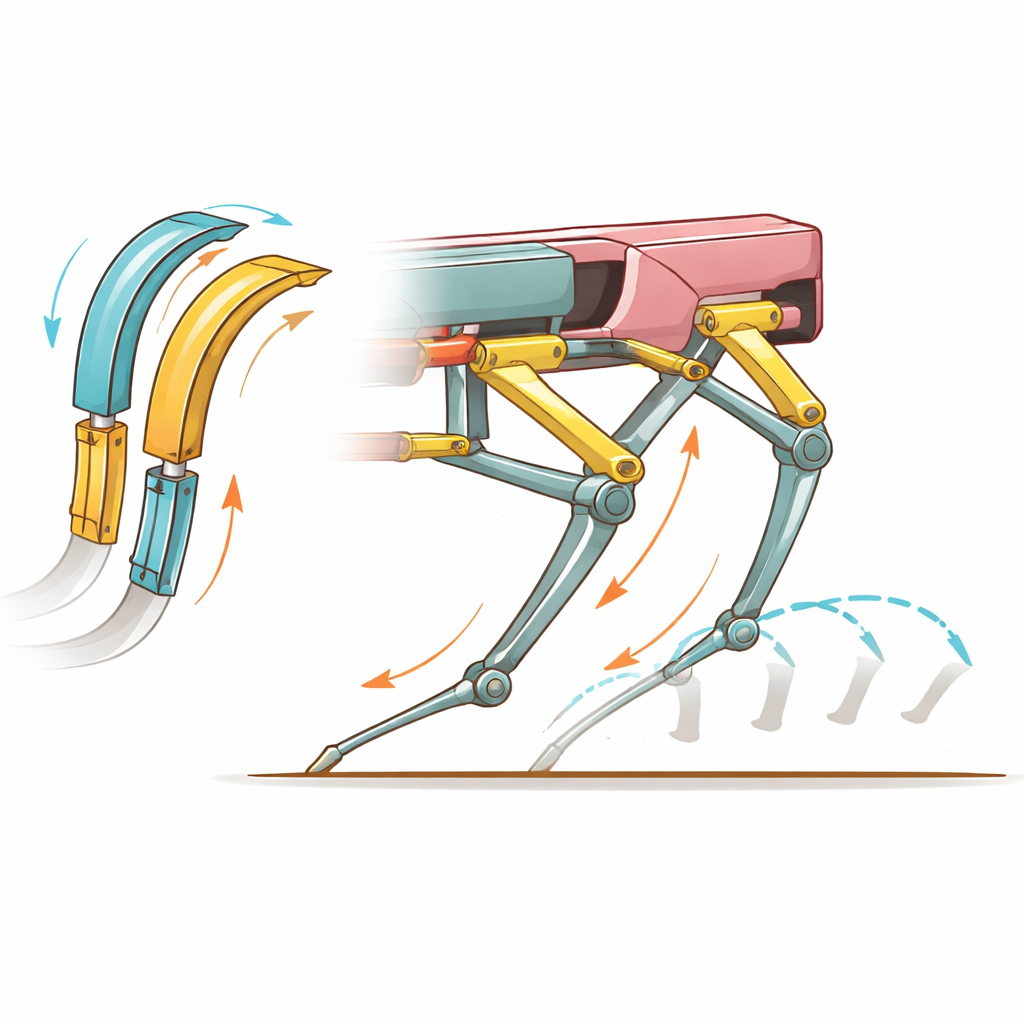
Движение робота обеспечивают пьезокерамические элементы — материалы, которые немного изгибаются при приложении электрического напряжения. По каждой стороне PLioBot расположена пара «двойных» полосовых актуаторов. Когда чередующиеся напряжения заставляют эти полосы изгибаться взад‑вперёд, их движение передаётся через систему шарнирных рычагов, работающих как миниатюрный параллельный ноговой механизм. Тщательно синхронизируя сигналы, каждая нога может двигаться вверх‑вниз и вперёд‑назад, описывая цикличную траекторию стопой. Координация всех четырёх ног в походной, подобной рыси, последовательности позволяет роботу эффективно опираться на грунт и быстро продвигаться вперёд. При оптимальных настройках PLioBot достигает скорости 44,6 сантиметра в секунду — примерно 18 длин корпуса в секунду — что делает его одним из самых быстрых ногатых роботов в этой размерной категории.
Встроенные «мышцы», меньше проблем при сборке
Большинство роботов размером с насекомых собираются вручную из множества крошечных деталей: отдельных моторов или актуаторов, рам и рычажных передач, которые нужно подгонять и выравнивать вручную. Это увеличивает стоимость, снижает точность и затрудняет массовое производство. Авторы решают эту проблему, полностью интегрируя конструкцию и приводы в единый «оригами‑механизм». Они используют отточенный процесс ламинации, при котором все слои — жёсткие стекловолоконные поверхности, ортогональные углеродные электроды, гибкая плёнка для шарниров и керамические полосы — вырезаются, укладываются, выравниваются по отверстиям для штифтов и горячим прессом соединяются, после чего окончательный контур вырезается лазером. В результате получается прочный плоский заготовок, который уже содержит скелет робота, шарниры и «мышцы» в их окончательных положениях и готов к складыванию в форму.
Хождение, лазание и плавание в реальных условиях
Чтобы проверить полезность своей конструкции вне лабораторного стола, команда испытала PLioBot на разнообразных бытовых препятствиях. На гладком стекле он рискует скользить, но всё равно быстро передвигается; на губке и акриле он получает лучшее сцепление, но теряет немного в скорости. Он забирается по наклонным плоскостям до 12 градусов и может нести грузы тяжелее самого себя — до 1,7 грамма, при этом особенно эффективно работает с нагрузками ниже примерно 0,8 грамма. В узких туннелях шириной всего 3 сантиметра и высотой менее 3 сантиметров робот переносит груз 1,4 грамма, сохраняя скорость в несколько длин корпуса в секунду. Заменив подошвы на полусферические накладки или лопастные плавники, PLioBot проходит гравий и траву, пересекает сыпучий песок, не проваливаясь, ходит по дну резервуара и даже плавает по поверхности воды, используя только свои лопасти для тяги.
Что это означает для будущих крошечных исследователей
Проще говоря, эта работа показывает, что можно напечатать и сложить очень маленького робота, у которого корпус и «мышцы» выполнены как единый элемент, и что такой робот может быстро перемещаться и справляться с множеством грязных, реальных поверхностей. PLioBot по‑прежнему зависит от внешних проводов питания, поэтому пока не является полностью автономным. Но интегрированная оригами‑конструкция и способ изготовления указывают на будущее, в котором большие партии недорогих роботов размером с насекомых можно будет производить как плоские детали, складывать их в форму и оснащать миниатюрными батареями и управляющей электроникой. Такие рои однажды могли бы обследовать разрушенные здания, инспектировать промышленные трубы или исследовать другие планеты — всё начиная с того, что поначалу выглядит как искусно вырезанный лист.
Цитирование: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Ключевые слова: роботы размером с насекомых, оригами в робототехнике, пьезоэлектрические актуаторы, локомоция, адаптирующаяся к местности, микропроизводство роботов