Clear Sky Science · ru
Исполнители из проволоки из сплава с эффектом памяти формы: моделирование, проектирование и управление
Металлические проволоки, которые «помнят» свою форму
Представьте тонкую металлическую проволоку, которая может сокращаться, как мышца, тихо сгибать палец робота, перестраивать крыло самолёта в полёте или аккуратно сжимать ослабевшее сердце — всего лишь при нагреве и охлаждении. В этом обзорном материале рассматриваются такие проволоки из сплавов с эффектом памяти формы (SMA): объясняется, как они работают, как инженеры проектируют и управляют ими, и где они уже применяются в роботах, авиации, медицине и носимых технологиях.
Как оживают «умные» металлические проволоки
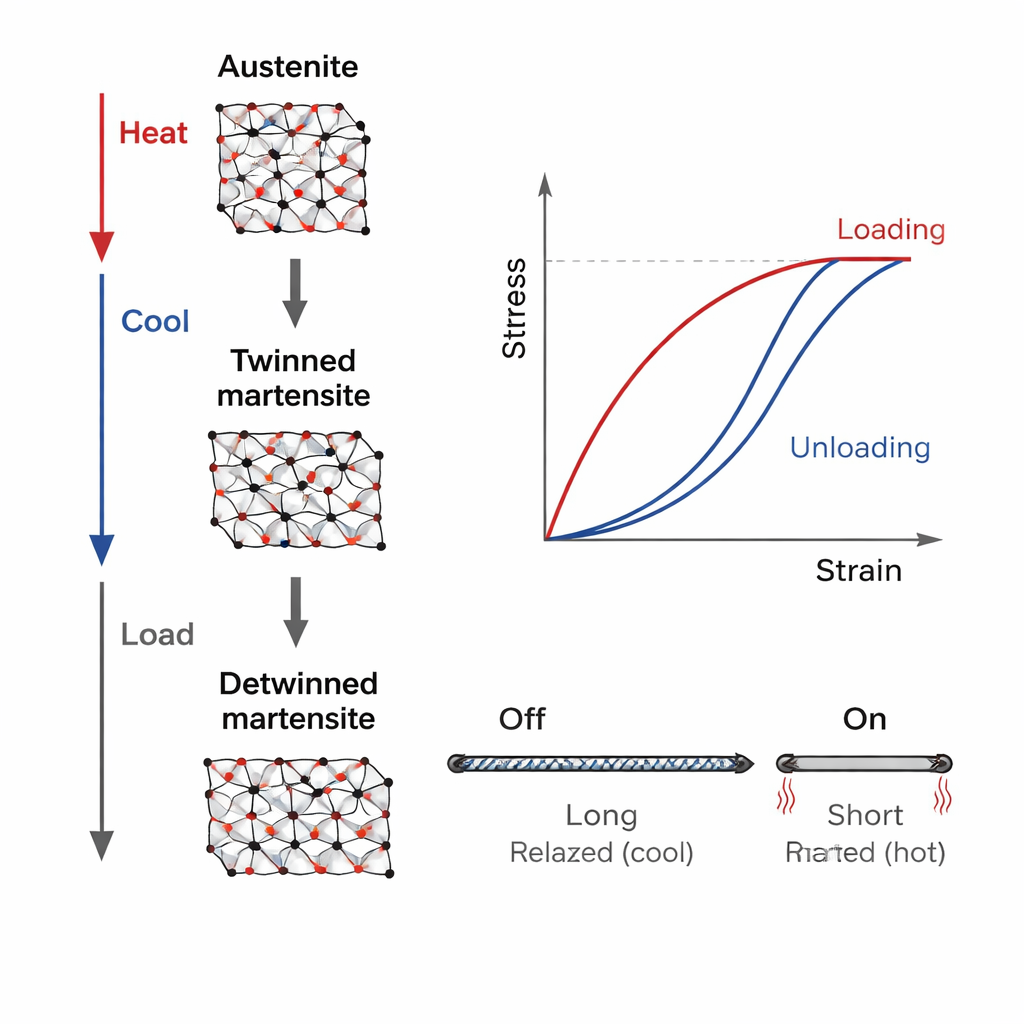
Сплавы с эффектом памяти формы — это особые металлы, которые можно деформировать, а затем вернуть их в заданную форму при изменении температуры. В одном режиме, называемом эффектом памяти формы, проволоку можно согнуть, когда она холодная и относительно мягкая; при нагреве она возвращается в исходную форму. В другом режиме — сверхупругости — сплав может растягиваться под нагрузкой и восстановить форму после её снятия. За этим поведением стоят твёрдо‑твёрдные фазовые переходы между разными кристаллическими структурами, что делает отклик сильно нелинейным и в некоторой степени труднопредсказуемым. Поскольку проволоки SMA тонкие, инженеры обычно рассматривают их как одномерные элементы, что упрощает математические модели, связывающие температуру, напряжение, деформацию и электрический ток.
От уравнений к моделям на основе данных
Чтобы надёжно использовать эти «умные» проволоки, конструкторам нужны модели, предсказывающие, с какой силой они тянут, как далеко перемещаются, насколько нагреваются и как меняется их электрическое сопротивление. Классические «конститутивные» модели рассматривают проволоку как сплошной материал и отслеживают изменения её внутренних фаз в зависимости от напряжения и температуры. Эти модели эффективны, но опираются на упрощающие допущения. Параллельно исследователи всё чаще применяют машинное обучение и нейронные сети, чтобы извлечь поведение проволоки напрямую из экспериментальных данных, захватывая тонкую гистерезисную и историческую зависимость. Ещё одно важное направление изучает, как сопротивление и температура проволоки изменяются при прогреве током, что даёт возможность самодиагностики — оценивать силу или движение по измерению сопротивления без добавления отдельных датчиков.
Создание движения: простые нагрузки, мягкие конструкции и искусственные мышцы
С аппаратной точки зрения статья классифицирует приводы на основе проволоки SMA по типу нагрузки. В простейших схемах с «линейной нагрузкой» проволока тянет против пружины или груза, приводя в действие захваты или механизмы отделения в космосе. Более сложные системы с «нелинейной нагрузкой» интегрируют проволоки в гибкие балки, мягкие полимеры, текстиль или конструкции в стиле оригами, чтобы обеспечить крупные изгибные движения, ползающих роботов и плетёные экзоскелетные перчатки. Дифференциальные конфигурации используют две или более противостоящих проволоки, имитируя пары мышц, например бицепс и трицепс, чтобы обеспечить быстрое обратимое движение в суставах — искусственных локтях и голеностопах. Поскольку проволока SMA может укоротиться примерно на 8%, ключевая инженерная задача — увеличение хода: намотка длинных проводов на шкивы, прокладка их по кривым траекториям, модульные скользящие или вращающиеся стадии, а также применение пружин из SMA для достижения больших перемещений в ограниченном пространстве.
Учить «умные» проволоки подчиняться
Управлять такими приводами сложно, потому что их отклик зависит и от температуры, и от механической истории. В статье рассматривается спектр стратегий управления — от классических PID‑регуляторов до более сложных схем. Подходы на основе модели используют уравнения из физики или модели гистерезиса для разработки скользящих режимов управления и упреждающих компенсаторов, противодействующих нелинейности. Нейросетевые и методы обучения с подкреплением идут дальше, обучаясь управлять проволокой для точного движения без полной опоры на идеальные модели. Одновременно методы самодиагностики используют изменение сопротивления проволоки как встроенный сигнал обратной связи, иногда в сочетании с нейросетями, чтобы оценивать положение или силу без громоздких внешних датчиков.
Реальные применения и направления развития
Исполнители из проволоки SMA уже приводят в действие мягкие роботизированные захваты, крошечных ползающих роботов, морфирующие крылья самолётов, устройства отделения спутников, имплантируемые насосы и стенты, вспомогательные обёртки для сердца, компрессионные изделия, экзоскелеты и перчатки для реабилитации. Во всех этих областях остаются типичные препятствия: медленное охлаждение и нагрев, усталость при большом числе циклов, сложность управления и стоимость производства. Авторы утверждают, что прогресс будет зависеть от интеграции трёх направлений: лучших многомасштабных и дополненных данными моделей, более умных конструкций, сочетающих SMA с гибкой электроникой и многофункциональными материалами, и интеллектуальных стратегий управления, адаптирующихся в режиме онлайн. Они представляют себе объединённые «моделирование–проектирование–управление» фреймворки, поддерживаемые цифровыми двойниками и машинным обучением, которые смогут совместно оптимизировать эти аспекты. Для неспециалиста мысль такова: эти меняющие форму проволоки перерастают из лабораторных курьёзов в практические искусственные мышцы, способные тихо менять форму машин, медицинских приборов и носимых систем в ближайшие годы.
Цитирование: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Ключевые слова: сплав с эффектом памяти формы, мягкая робототехника, интеллектуальные приводы, морфирующие конструкции, носимые устройства