Clear Sky Science · pt
Mapeamento Probabilístico de Ocupação Inspirado no Cérebro com Arquiteturas Simbólicas Vetoriais
Robôs que Veem o Mundo como um Patchwork
Todo carro autônomo, robô de armazém ou aspirador doméstico precisa de uma representação rápida do entorno: o que é sólido, o que é vazio e o que ainda é desconhecido. Este artigo apresenta uma nova forma de construir essa representação—chamada mapa de grade de ocupação—que empresta ideias de como o cérebro pode representar informação, buscando manter a precisão dos mapas ao mesmo tempo em que os torna muito mais rápidos e eficientes de computar.
Transformando Pings de Sensores em um Mapa do Mundo
Robôs frequentemente usam scanners a laser ou outros sensores de distância para sondar o mundo enquanto se movem, coletando nuvens de pontos sobre onde há objetos e onde o espaço está livre. Uma técnica clássica, o mapeamento por grade de ocupação, divide o ambiente em pequenas células, como pixels em uma tela, e atribui a cada uma uma probabilidade de estar ocupada. Métodos tradicionais tratam isso como um problema estatístico pesado, acompanhando cuidadosamente a incerteza, mas consumindo muito tempo e memória. Métodos mais recentes baseados em redes neurais são mais rápidos e conseguem preencher lacunas, mas funcionam como caixas-pretas, podem ser difíceis de confiar em contextos de segurança e geralmente precisam ser reteirados para cada novo ambiente.
Um Caminho Intermediário Inspirado no Cérebro
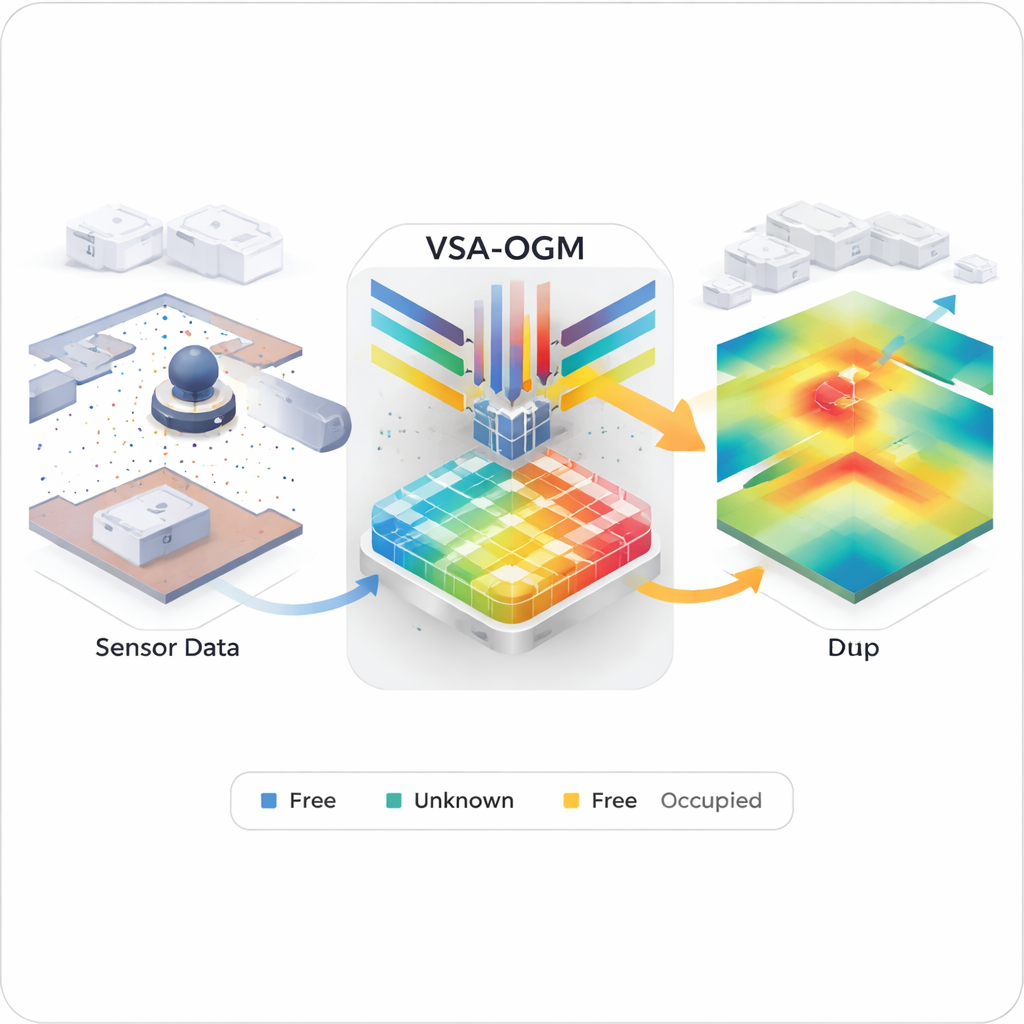
Os autores propõem um compromisso “neuro-simbólico” chamado VSA-OGM, sigla para Vector Symbolic Architecture Occupancy Grid Mapping. Em vez de armazenar cada detalhe em uma grade densa ou enterrar estrutura dentro de milhões de pesos de rede neural, o método codifica leituras de sensores como vetores muito longos em um espaço de alta dimensionalidade—uma ideia matemática inspirada por teorias sobre como grupos de neurônios podem representar conceitos e posições. O ambiente é dividido em blocos, e cada bloco tem memórias vetoriais para evidência de “ocupado” e “vazio”. À medida que o robô se move e coleta nuvens de pontos, cada observação é convertida em um desses vetores hiperdimensionais e agrupada na memória do bloco apropriado, acumulando informação ao longo do tempo de forma eficiente.
De Vetores Ruidosos a Mapas Claros
Claro que agregar muitos sinais em uma única memória hiperdimensional corre o risco de criar um emaranhado ruidoso e difícil de interpretar. O VSA-OGM resolve isso com um pipeline de decodificação cuidadosamente projetado. Primeiro, compara as memórias dos blocos com vetores que representam posições no espaço, produzindo “quasi-probabilidades” aproximadas de ocupação. Em seguida, aplica uma série de etapas não lineares e uma ferramenta da teoria da informação, a entropia de Shannon, para destacar onde os dados apoiam fortemente uma classe em relação à outra. Por fim, usa uma função softmax para converter esses sinais em probabilidades verdadeiras e os combina em um mapa final que mostra a diferença assinada entre “ocupado” e “vazio”. O resultado é uma grade de ocupação suave que interpola regiões medidas de forma esparsa, mantendo-se totalmente probabilística e interpretável.
Mapas Mais Rápidos para um Robô—ou Muitos
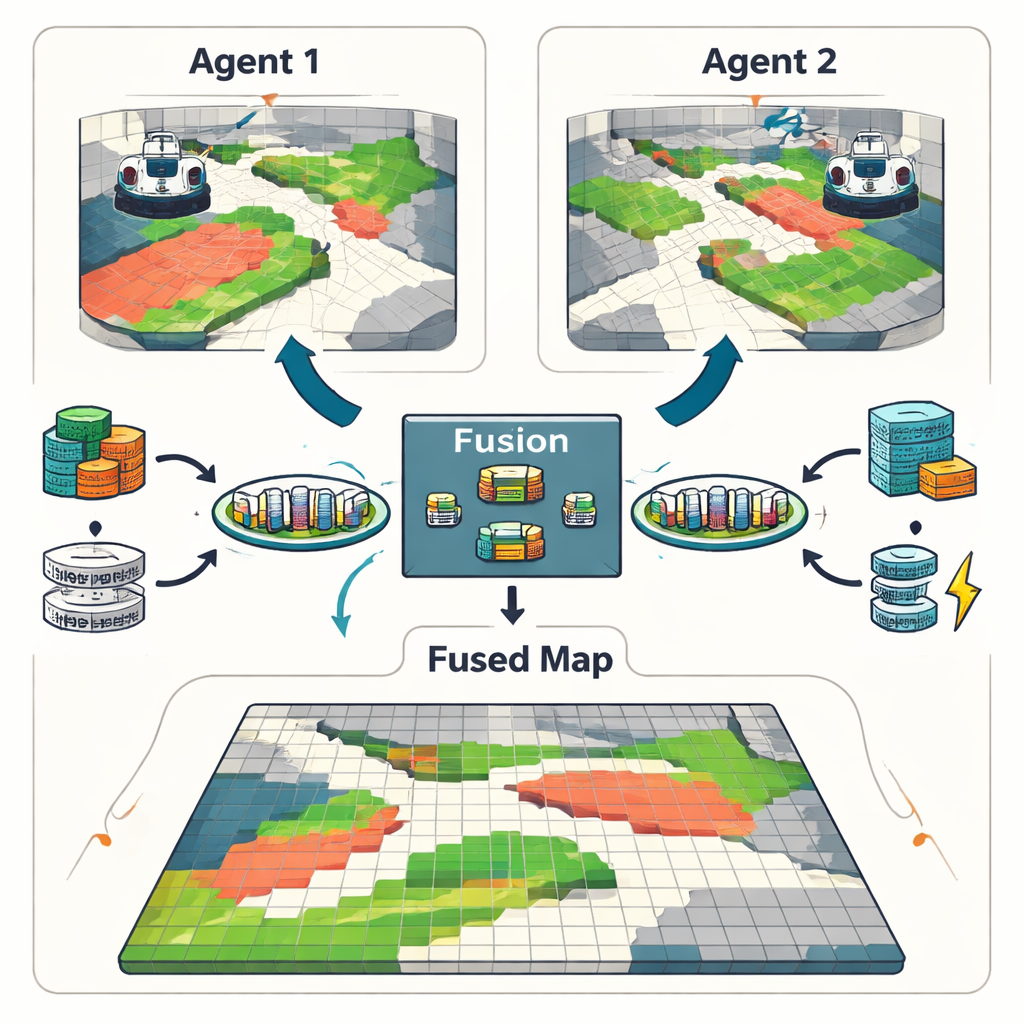
Para testar a abordagem, os pesquisadores executaram o VSA-OGM em vários conjuntos de dados simulados e reais, incluindo um mapa clássico de robô indoor e um cenário de direção em grande escala. Frente a linhas de base tradicionais que modelam cuidadosamente correlações espaciais, o VSA-OGM alcançou precisão de mapeamento semelhante, mas usou cerca de 400 vezes menos memória e rodou até 45 vezes mais rápido. Em comparação com métodos tradicionais simplificados que abandonam alguns detalhes estatísticos, ele ainda igualou a precisão reduzindo a latência em aproximadamente um fator de cinco. Quando comparado a um sistema baseado em rede neural que requer horas de treinamento e milhões de parâmetros, o VSA-OGM entregou qualidade de mapeamento comparável sem pré-treinamento e reduziu o tempo de processamento por quadro em até seis vezes. O framework também suporta múltiplos robôs: memórias vetoriais de agentes diferentes podem ser simplesmente somadas, produzindo mapas fundidos com pouca perda de informação.
O Que Isso Significa para Robôs do Dia a Dia
Em termos simples, este trabalho mostra que os robôs não precisam escolher entre matemática lenta-mas-confiável e redes neurais rápidas-mas-opacas ao construir mapas do mundo. Ao usar vetores hiperdimensionais inspirados no cérebro, o VSA-OGM mantém a clara estrutura probabilística dos métodos clássicos enquanto alcança a velocidade e eficiência necessárias para operação em tempo real em hardware limitado. Ainda existem desafios—como lidar com dados extremamente desiguais e ambientes muito densos—mas a abordagem aponta para robôs futuros que podem entender seu entorno de modo seguro e confiável, mesmo rodando em computadores de bordo modestos.
Citação: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Palavras-chave: mapeamento por grade de ocupação, robôs autônomos, arquiteturas simbólicas vetoriais, mapeamento probabilístico, sensoriamento LiDAR