Clear Sky Science · pt
Evidência comportamental para a execução hierárquica de movimentos sequenciais
Como nossos cérebros transformam movimentos simples em ações fluidas
Tarefas cotidianas como digitar no teclado, tocar uma escala no piano ou alcançar vários objetos sobre uma mesa parecem fáceis. No entanto, nos bastidores, seu cérebro precisa encadear muitos pequenos movimentos em ações suaves e coordenadas. Este estudo põe uma pergunta aparentemente simples: o cérebro sempre planeja essas cadeias de ações como um único movimento longo, ou as constrói passo a passo, usando uma hierarquia oculta de blocos menores?
Alcançando alvos grandes sobre a mesa
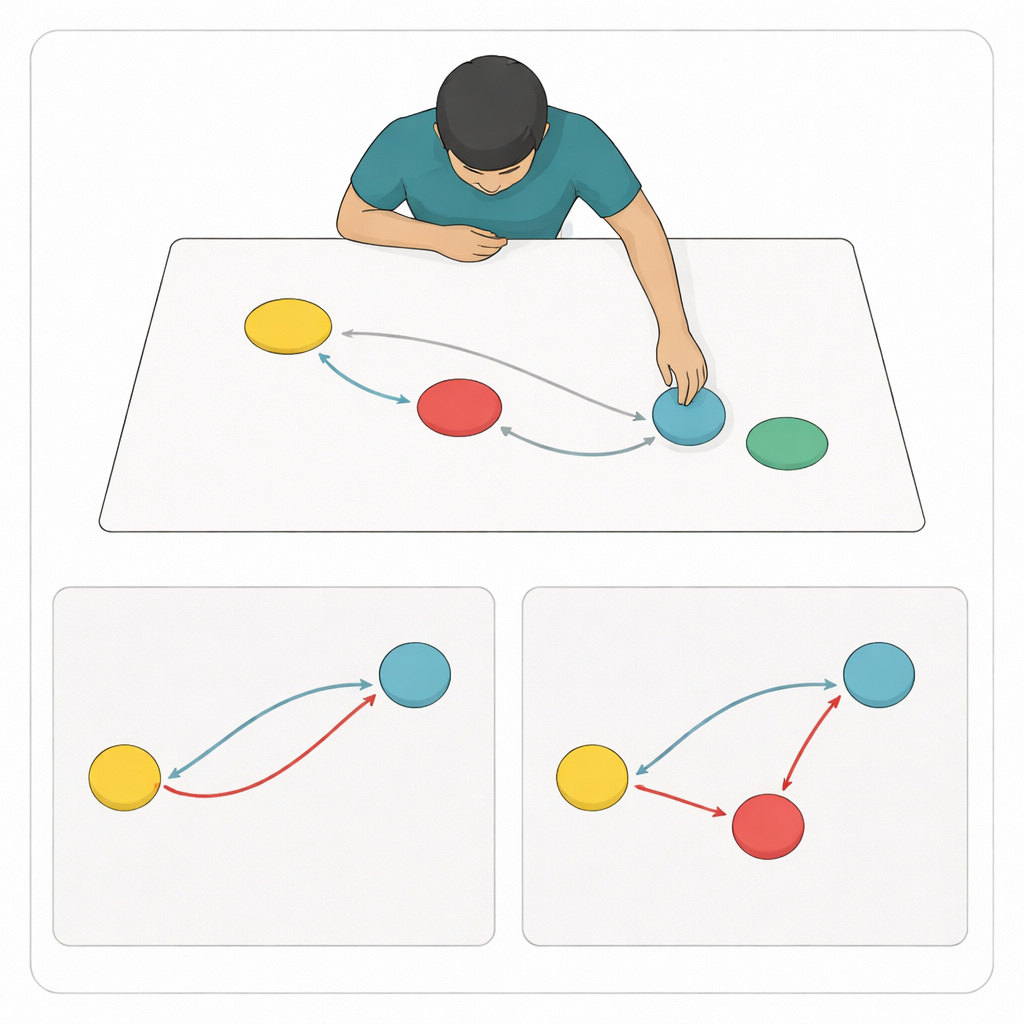
Para investigar isso, os pesquisadores criaram um jogo de “ligue os pontos” para a mão sobre a mesa. Vinte voluntários sentaram-se a uma mesa com vários círculos coloridos grandes impressos na superfície. Um círculo inicial ficava próximo ao corpo, com outros círculos colocados à esquerda, à direita e acima. Em cada tentativa, os participantes ouviam um som e tinham que mover a ponta do dedo indicador a partir do círculo inicial, passando por uma curta sequência de alvos e voltando, o mais rápido possível, mas sem precisar de precisão extrema: bastava que a ponta do dedo pousasse em qualquer ponto dentro de cada círculo. Essa configuração de baixa precisão incentivou as pessoas a se moverem de forma rápida e fluida, permitindo que suas trajetórias se curvassem e se mesclassem entre os alvos em vez de parar bruscamente em cada um.
Lendo planos ocultos nas curvas da mão
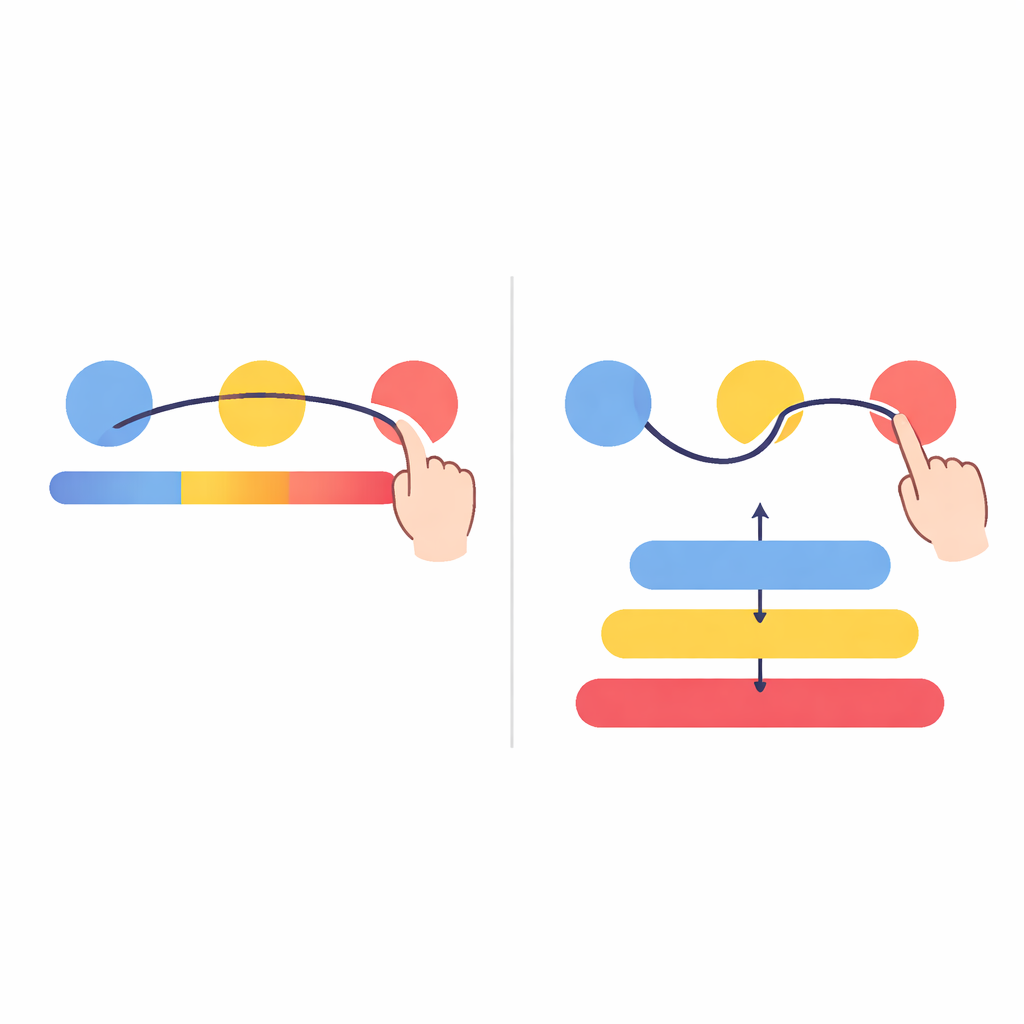
Em vez de medir quanto tempo as pessoas levavam ou com que frequência erravam, a equipe concentrou-se na forma exata de cada trajetória da ponta do dedo. Eles analisaram duas características principais. Primeiro, a “flexão intermediária”: o quanto a trajetória rumo a um alvo se desviava na direção do alvo seguinte antes de realmente alcançá‑lo. Segundo, o “contorno em torno de um alvo”: com que nitidez ou suavidade a trajetória curvava ao passar perto de um alvo e mudar de direção. Juntos, esses padrões revelam se um movimento para um alvo já está levando em conta o alvo seguinte — um efeito chamado “coarticulação”, semelhante a como a boca molda sons futuros durante a fala. Os cientistas compararam essas curvas medidas com as trajetórias produzidas por dois modelos computacionais de planejamento de movimento, ambos baseados em teorias estabelecidas de controle ótimo, porém diferentes em sua estrutura interna.
Planos planos versus planos em camadas
No modelo “plano”, imagina‑se que o cérebro planeja toda a sequência de três alvos como uma única trajetória unificada antes de a mão começar a se mover. Isso se assemelha a um gesto totalmente memorizado ou a um “chunk” executado de uma vez. Nesse caso, a flexão intermediária e o contorno em torno dos alvos estão fortemente ligados: uma vez que o planejador decide com que intensidade mirar o primeiro alvo, isso fixa em grande parte como as curvas se parecerão por toda a sequência. O modelo “hierárquico”, em contraste, acrescenta uma camada intermediária simples que costura pedaços menores — como um movimento de dois alvos seguido por um retorno a um alvo — em tempo real. Um sistema dinâmico separado decide quando mudar de um submovimento para o próximo, permitindo que a forma ao redor de cada alvo seja ajustada de modo mais independente, ao mesmo tempo em que mantém a fluidez geral do movimento.
Comportamento que parece hierárquico
Quando os pesquisadores executaram muitas simulações, descobriram que o modelo plano simplesmente não conseguia gerar algumas combinações de flexão intermediária e contorno que os participantes humanos naturalmente produziram. Em particular, as pessoas frequentemente exibiam forte desvio em direção ao segundo alvo na primeira parte do movimento, mas ainda faziam uma curva acentuada ou com formato diferente ao redor desse segundo alvo — padrões que o planejador plano não conseguia reproduzir. O modelo hierárquico, por sua vez, conseguiu recriar esses comportamentos mistos ligando dinamicamente submovimentos separados em alvos intermediários. Ao comparar os dados reais com ambos os modelos, os autores concluíram que quase metade de todas as sequências de movimento registradas claramente exigia uma explicação hierárquica, enquanto outras eram compatíveis com planejamento plano, sugerindo que as pessoas alternam estratégias de forma flexível dependendo da sequência.
O que isso significa para habilidades do dia a dia
Os achados sugerem que, mesmo sem prática longa ou rotinas altamente treinadas, nossos cérebros frequentemente dependem de planos em camadas ao encadear alcances simples. Em vez de sempre comprimir uma sequência em um único chunk rígido, o sistema motor parece manter peças de movimento reutilizáveis prontas para serem conectadas em tempo real. Com o treinamento, essas cadeias podem gradualmente colapsar em ações mais planas e totalmente “chunked”, ajudando a explicar como habilidades se tornam tão rápidas e automáticas. Este trabalho oferece uma nova janela, baseada em geometria, sobre como o cérebro organiza o movimento, o que pode orientar pesquisas futuras em aprendizado motor, reabilitação e no design de robôs que se movam com uma graça adaptativa similar.
Citação: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Palavras-chave: controle motor, planejamento de movimento, agrupamento (chunking), comportamento hierárquico, alcance sequencial