Clear Sky Science · pt
Ancoragem por fratura: impacto dinâmico permite ancoragem robótica previsível ao gelo de água doce
Escalando onde a gravidade quase não existe
Imagine tentar escalar um penhasco congelado onde a gravidade é tão fraca que seu próprio peso não ajuda suas botas a cravar. Esse é o desafio para robôs futuros enviados a luas geladas como Encélado, de Saturno, onde cientistas esperam procurar sinais de vida em chaminés e cavernas de gelo profundas. Este artigo descreve uma nova forma dos robôs se prenderem ao gelo usando golpes rápidos, semelhantes a marteladas, e uma pinça firme, inspirada nos piolets dos alpinistas. O resultado é um sistema de ancoragem leve que usa muito menos força e energia do que os parafusos de gelo ou picaretas aquecidas atuais, potencialmente tornando mundos gelados antes inacessíveis mais alcançáveis.

Por que segurar no gelo é tão difícil
Na Terra, um escalador pode apoiar todo o seu peso num parafuso de gelo ou numa machadinha para que ela morda a superfície. Em Encélado, a gravidade é cerca de um por cento da terrestre, então um robô não pode contar com seu peso para empurrar ferramentas no gelo. As opções existentes têm grandes desvantagens. Parafusos de gelo exigem forças de empuxo consideráveis para começar a morder a superfície — tanto que, em Encélado, um robô poderia precisar pesar tanto quanto um grande rover marciano para usá-los de forma eficaz. “Picaretas térmicas” aquecidas podem se fundir no lugar com muito pouco empurrão, mas consomem quantidades enormes de energia a cada uso, uma limitação séria para espaçonaves operando longe do Sol. Ao mesmo tempo, muitos robôs de escalada modernos dependem de texturas rochosas, sucção ou adesivos especiais, todos os quais têm dificuldade com as formas lisas e onduladas encontradas no gelo glacial natural.
Tomando emprestada uma técnica dos escaladores humanos
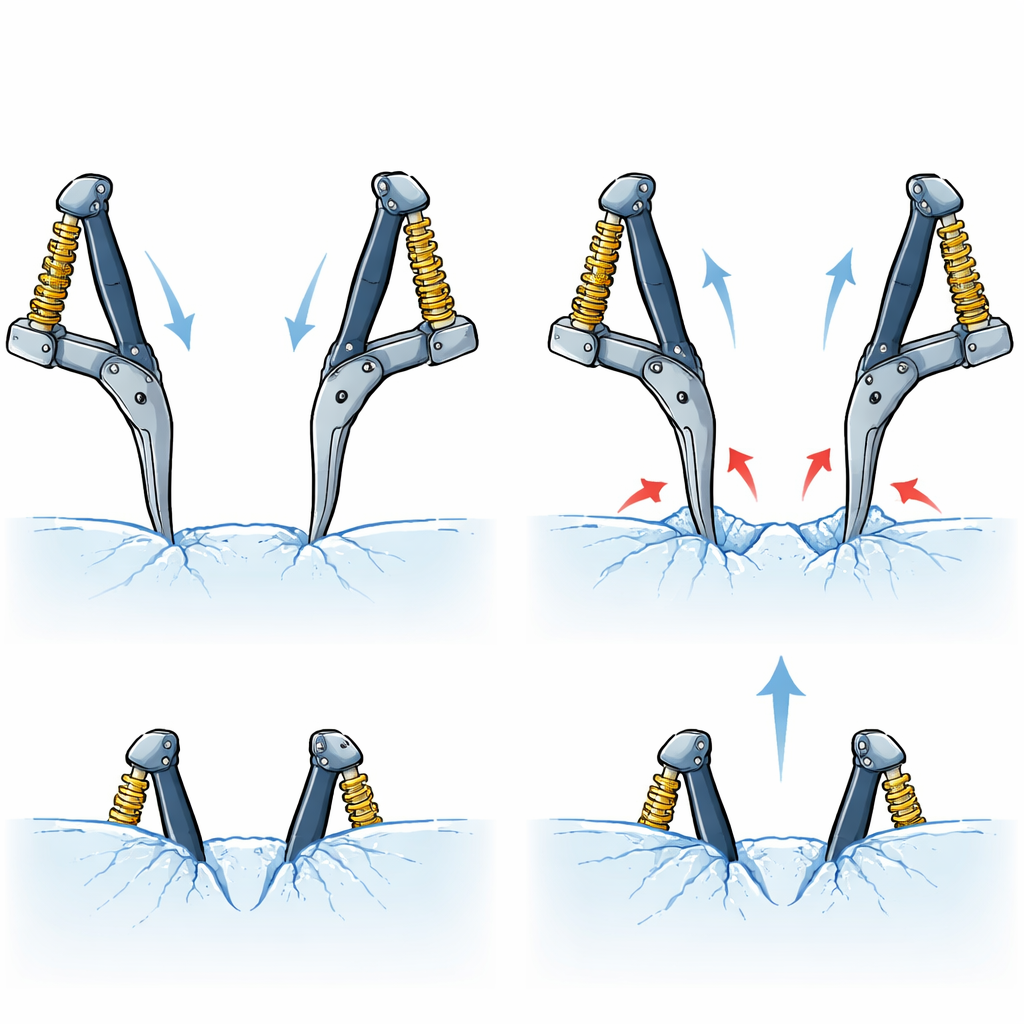
Os autores propõem uma estratégia diferente: em vez de se adaptar à superfície do gelo, crie seus próprios pontos de pegada. O dispositivo usa duas pequenas machadinhas montadas em uma garra compacta. Primeiro, molas dentro dos braços são tensionadas, armazenando uma quantidade moderada de energia mecânica. Ao serem liberadas, as machadinhas balançam como martelos minúsculos e golpeiam o gelo, arrancando pequenas cavidades. Em seguida, o mesmo mecanismo aperta as machadinhas uma contra a outra para que suas pontas se fixem nas novas indentações. Esse processo em duas etapas — impacto, depois apreensão — transforma um trecho liso de gelo em algo que o robô pode segurar, e pode ser revertido facilmente para que o robô dê outro “passo”. Todo o ciclo é acionado por um único motor que tanto carrega as molas quanto aperta a garra.
Testando a física por trás da pegada
Para garantir que essa abordagem funcionasse de modo confiável, a equipe construiu modelos matemáticos de quão profundamente as pontas das machadinhas penetrariam e quanta energia de recuo poderiam ter após o impacto. Em seguida testaram machadinhas individuais balançando como pêndulos contra blocos de gelo de água doce resfriados a temperaturas típicas de geleiras. Ao comparar teoria e experimento, descobriram que seus modelos podiam prever a profundidade da cavidade formada e estimar a energia de “recuo” quando a machadinha ricocheteia. Usando esses resultados, calcularam quanta força um robô deve pressionar a garra contra o gelo antes do golpe, para que as machadinhas permaneçam nas cavidades em vez de saltarem para fora. Para a energia de mola escolhida, o modelo previu que cerca de 16 newtons de empuxo — aproximadamente o peso de alguns litros de água na Terra — dariam quase certeza de sucesso.
Da bancada de laboratório à parede glacial
Com os modelos em mãos, os pesquisadores testaram a garra completa de dupla-machadinha. No laboratório, confirmaram que impactos com energia armazenada nas molas de 8 joules podiam criar cavidades suficientemente profundas enquanto exigiam muito menos empuxo inicial do que parafusos de gelo e energia muito menor do que âncoras térmicas. Em seguida mediram a resistência da pegada final puxando o dispositivo diretamente para fora do gelo. Ajustando quão firmemente as machadinhas se comprimiam uma contra a outra, descobriram duas formas de falha da ancoragem: com compressão baixa, as pontas deslizam para fora das cavidades; com compressão muito alta, as saliências do gelo se quebram. Entre esses extremos está um ponto ótimo em que a garra podia suportar mais do que o dobro do próprio peso. Testes de campo em uma geleira francesa mostraram que o dispositivo podia ancorar em gelo natural íngreme, neve dura e até em troncos de árvore, rochas e solo compactado, confirmando que o método de impacto-e-pegada funciona fora do laboratório.
O que isso significa para exploradores futuros
O estudo mostra que fraturar e pinçar o gelo pode ser uma maneira altamente eficiente para robôs escalarem e se manterem estáveis em ambientes severos de baixa gravidade. Ao explorar o fato de que fraturar gelo usa muito menos energia do que derretê-lo, a garra de dupla-machadinha forma âncoras fortes e reversíveis usando forças moderadas e apenas alguns joules de energia por passo. Para missões a Encélado ou outros mundos gelados, um sistema assim poderia permitir que robôs pequenos e com energia limitada descessem com segurança em chaminés ou se pendurassem em paredes de penhasco enquanto amostram materiais que podem revelar se há vida além da Terra. A mesma ideia também pode ajudar robôs terrestres a explorar geleiras, cavernas de gelo e faces rochosas frágeis que são perigosas ou inacessíveis para escaladores humanos.
Citação: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Palavras-chave: escalada robótica no gelo, exploração planetária, pegas robóticas, ancoragem por fratura do gelo, missões a Encélado