Clear Sky Science · pt
Planejamento concreto de trajetórias multiagente possibilitando manobras cinodinâmicas agressivas
Robôs que Podem Dançar no Meio do Tráfego
Imagine dezenas de robôs voadores e de rodas cortando um armazém, nunca colidindo entre si e concluindo suas tarefas mais rápido do que motoristas humanos conseguiriam. Este artigo descreve uma nova forma de coreografar esse “trânsito” robótico para que muitas máquinas possam se mover de maneira agressiva e rápida em espaços apertados, mantendo-se seguras. O trabalho é importante porque as mesmas ideias podem um dia impulsionar frotas de robôs em fábricas, armazéns e serviços de entrega que precisam operar continuamente no nosso cotidiano.
Por Que Conduzir Muitos Robôs é Tão Difícil
Coordenar uma multidão de robôs é muito mais difícil do que conduzir um único. Cada robô precisa ir do ponto de partida ao objetivo sem bater, atrapalhar os outros ou ficar preso em loops infinitos. As abordagens atuais tendem a viver em dois extremos. Alguns métodos tratam robôs como peças num tabuleiro, o que torna o planejamento para centenas deles rápido e matematicamente elegante — mas as trajetórias resultantes frequentemente ignoram como máquinas reais se movem, aceleram ou viram. Outros métodos simulam o movimento físico completo e produzem trajetórias suaves e belas, porém tornam-se dolorosamente lentos ou pouco confiáveis quando o número de robôs cresce além de alguns poucos.
Um Caminho Intermediário: Planejamento “Concreto”
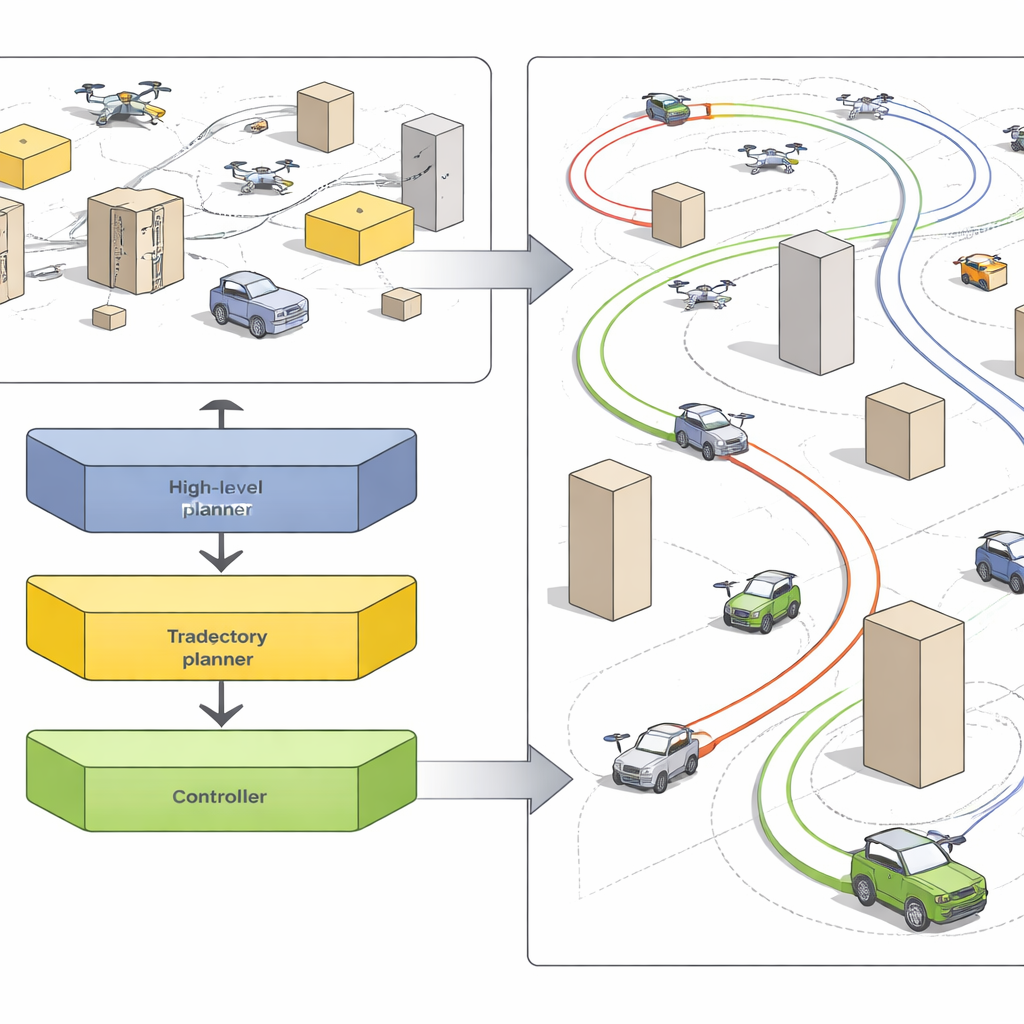
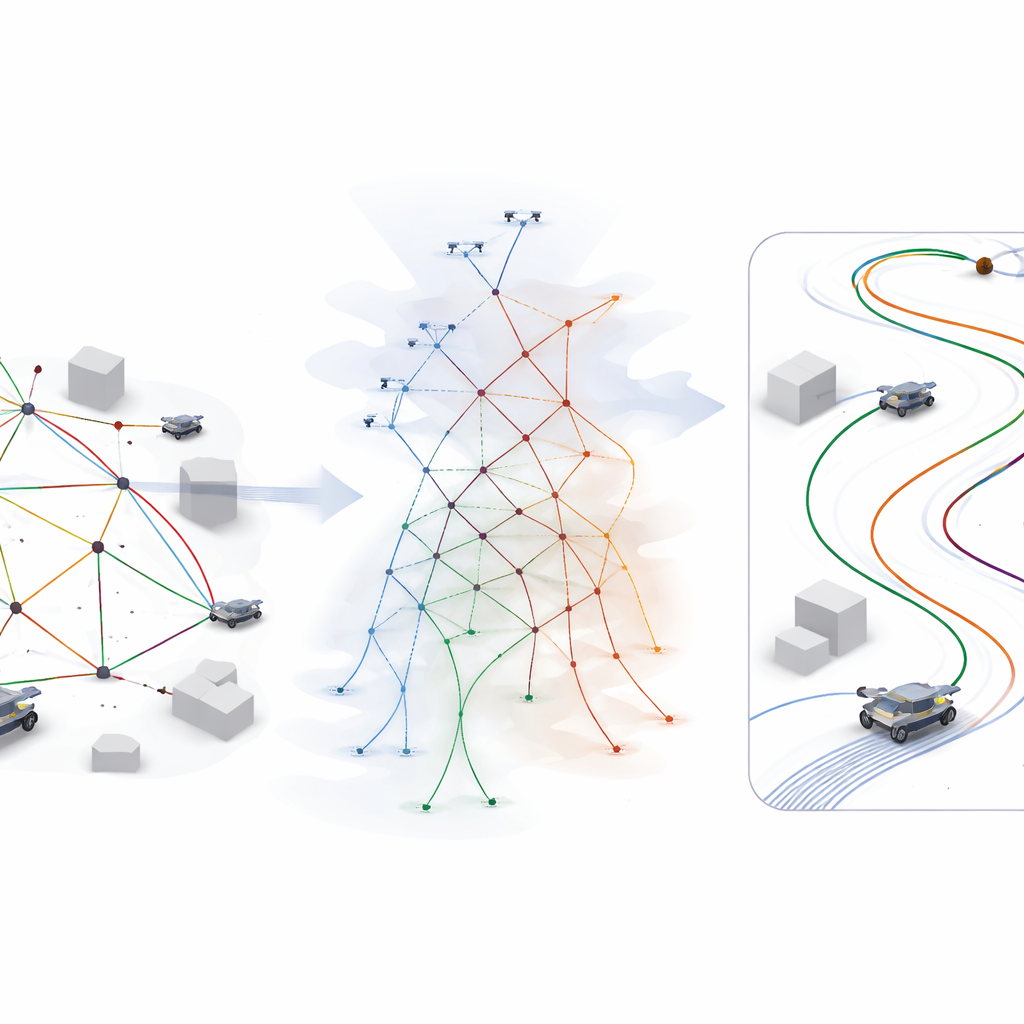
Os autores propõem uma estratégia híbrida que chamam de planejamento concreto de trajetórias multiagente. A ideia é misturar a estrutura nítida do planejamento em grade com uma imagem realista de como os robôs realmente se movimentam. Em vez de trabalhar puramente num grid abstrato ou numa física contínua completa, o sistema usa uma descrição em camadas do movimento. Um planejador central busca sobre um conjunto discreto de movimentos possíveis para todos os robôs ao mesmo tempo, mas cada movimento é enriquecido com previsões sobre quanto tempo levará, como o robô pode se desviar da linha pretendida e quão perto pode passar com segurança dos outros. Essas previsões vêm de modelos orientados por dados treinados em experimentos reais com robôs, então o planejador “sabe” como sua frota tende a se comportar na prática.
De Esboços Grossos a Movimento Preciso
Uma vez que o planejador acoplado produziu sequências seguras e sem conflitos de waypoints para cada robô, a arquitetura avança para detalhes. Um segundo módulo transforma cada caminho grosseiro em uma trajetória densa e suave que respeita limites de propulsão, direção e outros fatores físicos. Para fazer isso rapidamente, os autores primeiro usaram otimização numérica pesada offline para gerar muitos exemplos de movimento quase ótimos no tempo, e então treinaram redes neurais baseadas em transformers para imitar esses exemplos. Em tempo de execução, essas redes podem gerar caminhos de referência de alta qualidade em menos de um milissegundo. Uma terceira camada, um controlador preditivo de modelo equipado com um filtro de segurança, ajusta constantemente os comandos para seguir essas referências e usa sensoriamento local para desviar de surpresas, como um obstáculo errante ou um leve erro de rastreamento.
Testando Quarenta Robôs
A equipe demonstrou seu sistema com uma frota mista de 20 drones quadrotor, 8 robôs terrestres e 12 robôs atuando como obstáculos móveis, todos operando juntos em uma arena interna do tamanho de uma sala. Em um conjunto de experimentos, enxames de drones correram por espaços confinados em velocidades máximas acima de cinco metros por segundo enquanto evitavam uns aos outros numa espécie de balé tridimensional. Em outro, robôs terrestres atravessaram repetidamente uma área cheia de obstáculos em movimento aleatório, completando mais missões, com menos paradas e sem colisões, em comparação com métodos concorrentes. Os testes mais exigentes envolveram os 40 robôs executando múltiplas missões em sequência, com o sistema replanejando caminhos continuamente sob demanda sem impasses nem colisões.
Sinais de Futuro para Entregas e Sistemas de Armazém
Para mostrar como isso poderia se traduzir em tarefas do mundo real, os autores encenaram simulações de entregas “last‑mile” e operações de armazém. No cenário de entrega, robôs terrestres transportaram drones até uma “margem de rio”, onde os drones decolaram, voaram até pontos de entrega dispersos, retornaram às suas bases móveis e então voltaram para a área de partida — tudo isso evitando obstáculos móveis. Na maquete de armazém, equipes de drones transportaram repetidamente pacotes virtuais entre prateleiras e zonas de entrega, mantendo movimento denso, ágil e alto rendimento. Esses estudos de caso exigiram apenas ajustes mínimos da estrutura, o que ressalta sua capacidade de se adaptar a novas plataformas e missões.
O Que Isso Significa para o Futuro
Em termos simples, este trabalho mostra que é possível que grandes equipes de robôs se movam ao mesmo tempo de forma ousada e segura em espaços apertados e mutáveis ao combinar cuidadosamente planejamento de alto nível rápido, modelos de movimento realistas e checagens de segurança como último recurso. A abordagem “concreta” transforma planos abstratos em movimentos que máquinas reais podem executar em alta velocidade, oferecendo ao mesmo tempo garantias contra colisões e impasses em muitos cenários práticos. Embora ambientes extremamente caóticos e espaços completamente desconhecidos ainda sejam desafiadores, a estrutura aponta para um futuro em que frotas de drones de entrega, robôs de armazém e outros trabalhadores robóticos possam compartilhar ambientes lotados sem supervisão humana constante.
Citação: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Palavras-chave: coordenação multi-robô, planejamento de trajetória, enxames robóticos, automação de armazéns, entrega por drone