Clear Sky Science · pt
Estratégia de compensação comportamental adaptativa inspirada em insetos contra deficiência sensorial olfativa para localização de fonte de odor por robôs
Por que perder um sensor não significa perder o rastro
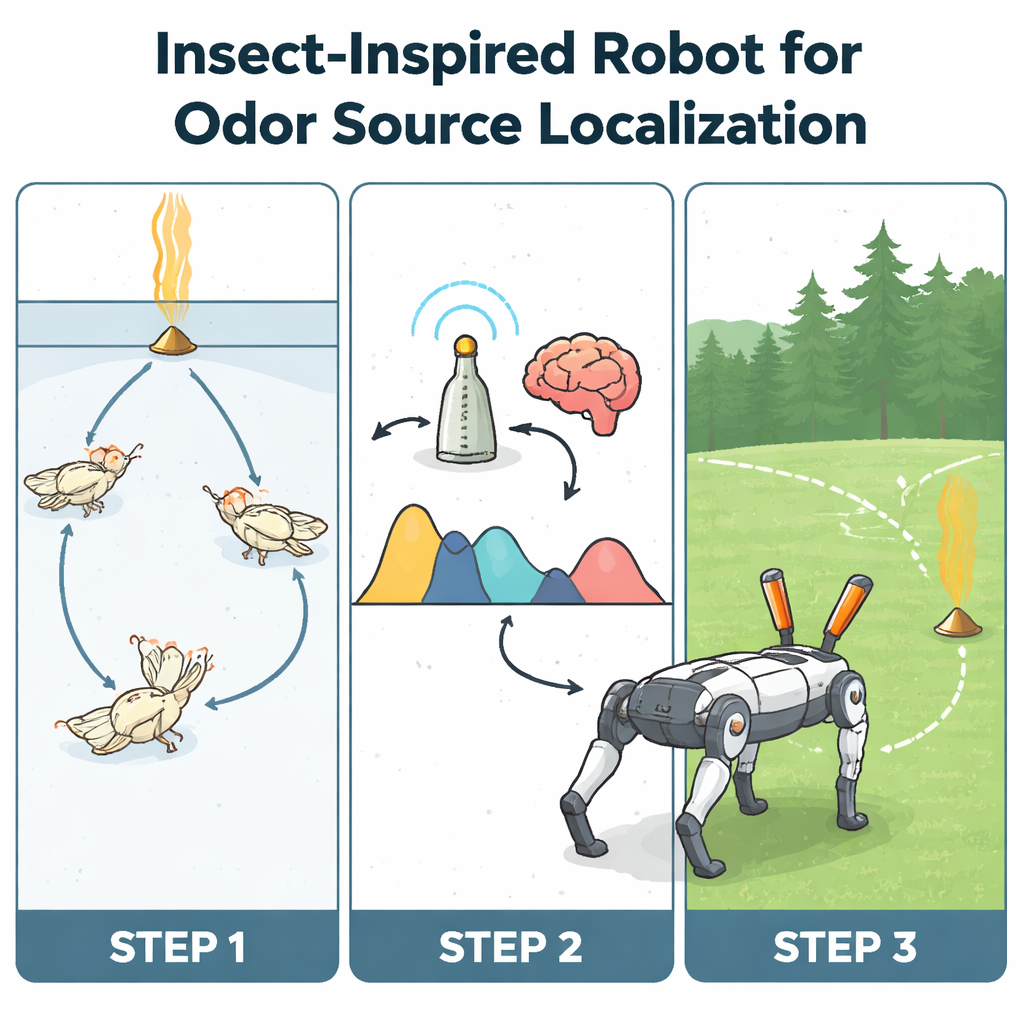
Imagine um robô de busca e resgate tentando farejar um vazamento de gás ou um sobrevivente preso em um prédio desabado — e então um de seus sensores-chave se rompe. Robôs atuais frequentemente falham de forma acentuada diante desse tipo de dano. Este estudo se inspira em um especialista surpreendente em navegação por cheiro, o macho do bicho-da-seda, para mostrar como animais conseguem continuar rastreando uma fonte de odor mesmo após perderem metade do “nariz”, e como essa estratégia pode ser reproduzida em robôs quadrúpedes.
Um pequeno navegador com um olfato poderoso
Muitos animais — de insetos a cães — usam sinais químicos no ar para encontrar comida, parceiros ou abrigo seguro. Odor é especialmente útil quando a visão está bloqueada por escuridão, fumaça ou escombros. Mas plumas de odor reais são bagunçadas: o vento muda, prédios e árvores desviam o fluxo, e o cheiro mais forte nem sempre fica diretamente a favor do vento em relação à fonte. A maioria dos robôs que caçam odores assume que todos os seus sensores olfativos funcionam perfeitamente e que as direções do cheiro e do vento se alinham ordenadamente. Na natureza, nenhuma dessas suposições se confirma. O bicho-da-seda Bombyx mori oferece um contraponto natural: os machos conseguem localizar fêmeas que liberam feromônios sexuais mesmo em vento turbulento e, de forma intrigante, mesmo quando uma de suas duas antenas — seus principais órgãos olfativos — é removida.
Como os mariposas lidam após perder uma antena
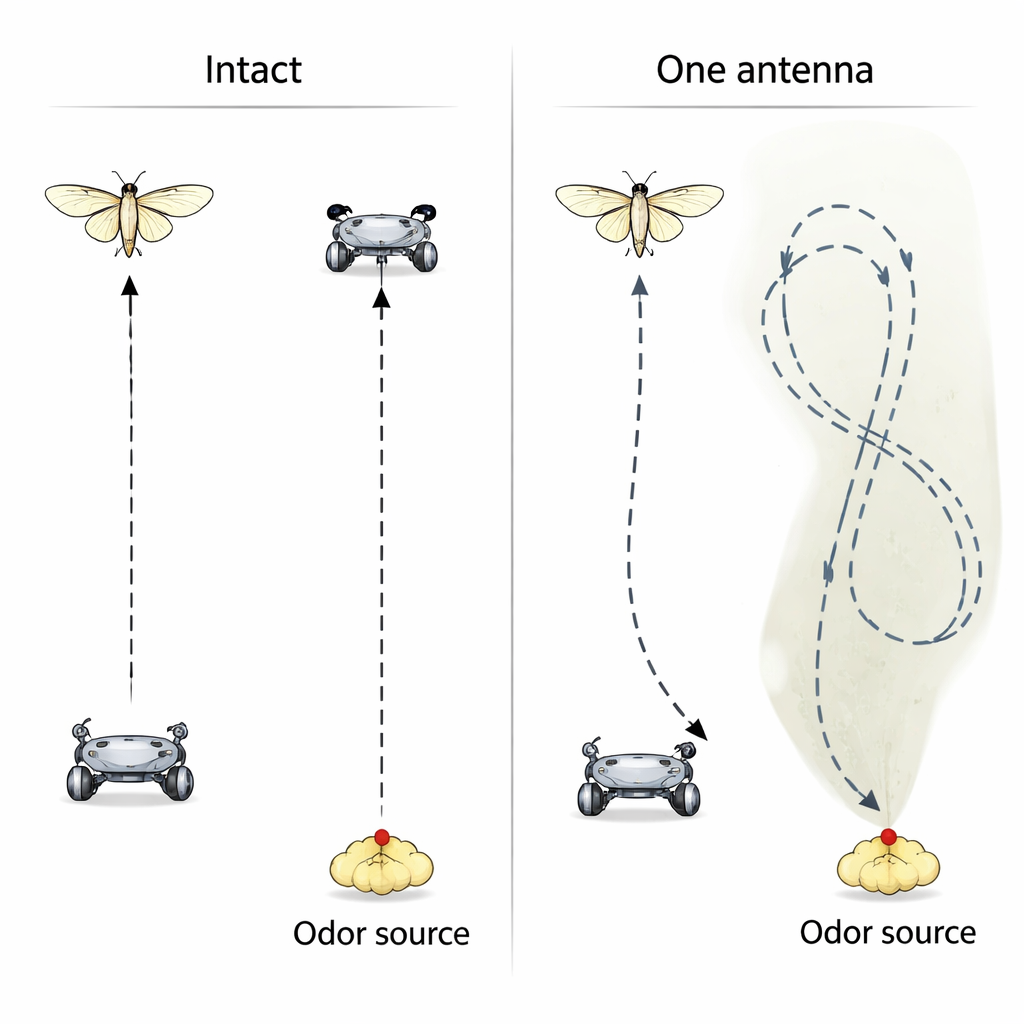
Os pesquisadores primeiro testaram quão bem machos intactos de bicho-da-seda e machos com a antena esquerda removida conseguiam caminhar até uma fonte de odor em laboratório. Ambos os grupos começaram a 15 centímetros de um ponto emissor de feromônio. Surpreendentemente, a taxa de sucesso — alcançar a fonte dentro de um minuto — não caiu significativamente após a remoção de uma antena. O que mudou foi a trajetória: mariposas intactas tendiam a marchar por um percurso relativamente reto, enquanto as de uma antena demoravam mais e seguiam caminhos mais sinuosos que curvavam para o lado da antena remanescente. Medidas detalhadas dos movimentos da cabeça revelaram que as mariposas mudavam sua estratégia de virada dependendo de onde, ao longo da antena restante, o odor era detectado — próximo à base ou perto da ponta — e de para qual lado estavam virando no momento.
DuAS regras simples escondidas em comportamento complexo
Ao pulsar repetidamente o odor pela esquerda e pela direita e rastrear os ângulos da cabeça das mariposas, a equipe converteu o comportamento em curvas de probabilidade que mostram quão provável era a mariposa virar à esquerda ou à direita após cada sopro. Quando um odor atingia perto da base da antena, a mariposa favorecia fortemente a continuidade da rotação para aquele mesmo lado, efetivamente comprometendo-se a seguir a virada atual. Quando o odor atingia perto da ponta, a escolha ficava mais equilibrada, com um leve viés para explorar o lado oposto. Simplificando, a perda da antena não fazia a mariposa desistir; fazia-a adotar um padrão de busca que amostra ambos os lados do espaço de forma mais ampla, especialmente ao longo da “borda” da pluma de odor, onde a intensidade do cheiro muda rapidamente.
Ensinando um robô quadrúpede a farejar como uma mariposa
Em seguida, os pesquisadores construíram um robô quadrúpede com dispositivos sensores de odor em sua “cabeça”, dispostos para imitar a estrutura base-para-ponta de uma antena. Eles criaram dois algoritmos de busca. O primeiro, uma abordagem padrão inspirada em mariposas chamada SZL (de surge–zigzag–loop), assume dois sensores de odor funcionando e escolhe a direção reta de “surge” a partir do tempo relativo das detecções esquerda e direita. O segundo, chamado context-dependent moth-inspired (CDMI), incorpora as novas regras das mariposas: estima onde, ao longo do sensor remanescente, um odor foi detectado e usa as curvas de probabilidade derivadas dos experimentos com animais para decidir para que lado se mover e com que intensidade virar. Em testes internos, o SZL funcionou melhor quando ambos os sensores estavam intactos, proporcionando trajetórias rápidas e relativamente retas. Mas quando um sensor foi desativado, o CDMI superou claramente o SZL, encontrando a fonte com mais frequência ao seguir a borda variável do campo de odor em trajetórias em looping semelhantes às das mariposas com uma antena.
Robôs que permanecem eficientes quando algo quebra
Para levar a ideia adiante, a equipe testou seus robôs ao ar livre, onde o vento natural e a turbulência tornam as plumas de odor altamente irregulares. Eles deram ao robô intacto o algoritmo convencional SZL e ao robô com um sensor o algoritmo CDMI. Ambos alcançaram taxas de sucesso comparáveis, mas o robô danificado usando a estratégia adaptativa inspirada nas mariposas frequentemente encontrou a fonte com caminhos mais curtos e menos sinuosos. Isso sugere que, em condições difíceis e do mundo real, pode ser melhor alternar de um esquema de sensoriamento preciso, porém frágil, para uma estratégia mais exploratória que segue as bordas. A mensagem mais ampla é que navegação robusta não exige inteligência artificial cada vez mais complexa. Em vez disso, regras simples, fundamentadas biologicamente — ligadas a como os sensores estão dispostos no corpo e a como o corpo interage com o ambiente — podem ajudar a criar robôs que continuam a operar mesmo quando partes-chave falham, uma propriedade crucial para missões de exploração e resgate de longa duração.
Citação: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Palavras-chave: navegação olfativa, robótica bioinspirada, localização de fonte de odor, IA inspirada em insetos, inteligência incorporada