Clear Sky Science · pt
Gripper reativo ao toque com uma palma ativa para manipulação hábil
Robôs que Podem Sentir o que Seguram
Imagine um robô capaz de colher delicadamente um morango maduro, desenroscar uma tampa com trava infantil ou rosquear uma lâmpada no alto — tudo isso sem esmagar, deixar cair ou desalinhar nada. Este artigo descreve uma nova pinça robótica que aproxima as máquinas desse tipo de habilidade manual cuidadosa e humana, fornecendo ao robô não apenas dedos inteligentes, mas uma palma ativa e altamente sensível.
Uma Palma que Faz Mais do que Apenas Segurar
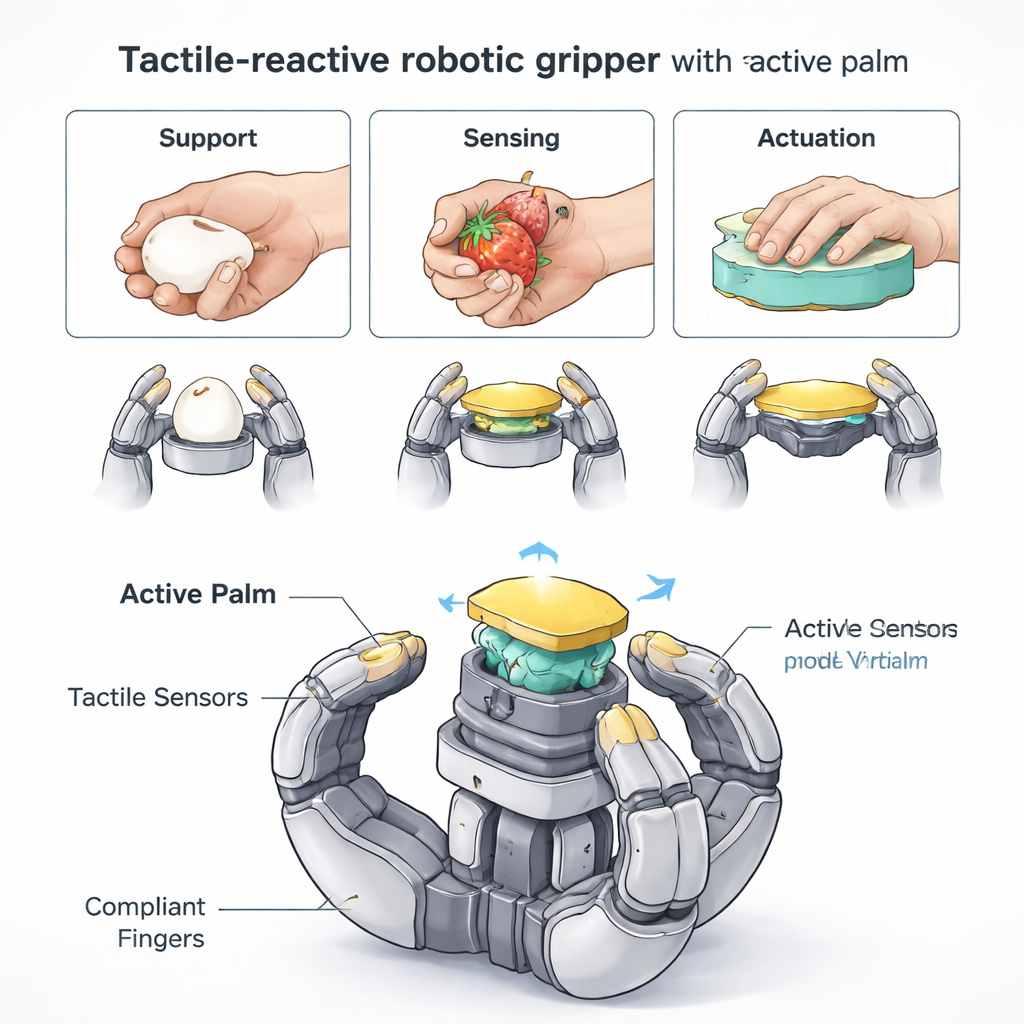
A maioria das mãos robóticas hoje ou tem garras simples e rígidas que só conseguem agarrar, ou mãos multifalanges muito complexas, difíceis de construir e controlar. Uma percepção central deste trabalho é que as mãos humanas dependem fortemente da palma — não só dos dedos — para suporte, sensibilidade e empurrões. Os pesquisadores projetaram uma pinça robótica de três dedos com uma palma central que pode mover‑se para cima e para baixo e é coberta por um sensor de toque baseado em câmera. Cada ponta de dedo também tem sua própria almofada flexível sensível à pressão. Juntas, essas partes permitem que a pinça perceba onde e como toca um objeto e ajuste sua preensão em tempo real, apesar de todo o sistema usar apenas sete juntas móveis.
Movimentos Simples, Muitas Maneiras de Segurar
Os três dedos idênticos da pinça podem varrer e dobrar, permitindo vários estilos de preensão do cotidiano: envolver objetos grandes como bolas, beliscar objetos finos como cartões e segurar ferramentas pesadas em uma pega de força. A estrutura macia, semelhante a uma espinha, envolve naturalmente objetos de formas diferentes sem programação detalhada. Enquanto isso, a palma desliza verticalmente como um elevador, podendo pressionar contra um objeto, compartilhar a carga com os dedos ou deslocar a posição do objeto na mão. Simulações e experimentos mostram que mesmo com apenas duas juntas por dedo mais a palma móvel, a mão pode mover objetos em muitas direções e evitar posturas estranhas e difíceis de controlar.
Sentir com Dedos e Palma
Para entender o que está segurando, a pinça combina três tipos de sensoriamento: imagens táteis detalhadas da palma, mapas de pressão das pontas dos dedos e leituras dos próprios ângulos das juntas. Um sistema de aprendizado de máquina funde esses sinais, dando mais atenção aos indícios que são mais úteis para um determinado objeto. Em testes com latas de bebida e bolas de diferentes tamanhos e materiais, o sistema conseguiu reconhecer o que segurava com quase 99% de precisão. Esse sentido tátil rico também orienta a intensidade da pressão, quando parar de fechar os dedos e como mover a palma para manter o contato estável sem gerar atrito excessivo.
De Objetos de Teste a Frutas e Lâmpadas
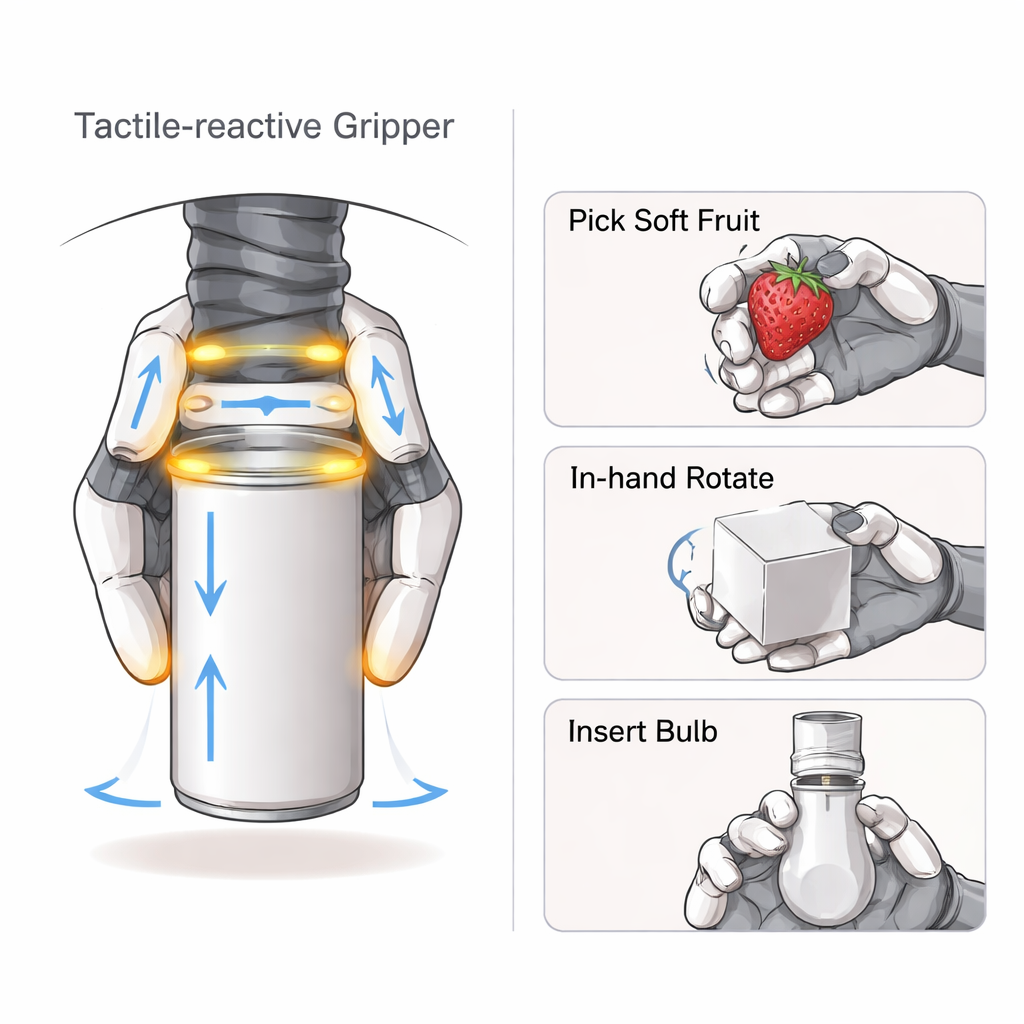
A equipe submeteu a pinça a um benchmark amplamente usado de preensão robótica com objetos do cotidiano, como bolas, ferramentas e pequenas peças de ferragem. Ela obteve pontuação superior a várias pinças conhecidas na pesquisa, usando menos partes móveis. Além dos conjuntos de teste, a pinça demonstrou que podia colher frutas frágeis — morangos, uvas, tomates e outras — sem amassados visíveis mesmo dias depois, confirmado sob luz ultravioleta. Também foi capaz de transladar e rotacionar blocos e cilindros com precisão na mão, rosquear uma lâmpada em um soquete voltado para cima, empurrar o êmbolo de uma seringa enquanto segurava o corpo e abrir tampas com trava infantil pressionando e girando. Em muitas dessas tarefas, a palma móvel forneceu o empurrão, suporte ou sensoriamento extra que as pinças apenas com dedos normalmente não têm.
Por que Isso Importa para os Robôs do Futuro
O trabalho demonstra que os robôs nem sempre precisam de mais e mais dedos ou juntas para serem habilidosos. Ao coordenar cuidadosamente alguns dedos com conformidade junto com uma palma controlada ativamente e sensível ao toque, essa pinça alcança uma combinação de força, delicadeza e percepção que começa a se assemelhar a uma mão humana. Como as peças são em grande parte impressas em 3D e usam sensores comercialmente disponíveis, o projeto é relativamente fácil de reproduzir. Com controle adicional baseado em aprendizado, pinças similares poderiam ajudar robôs a manusear mantimentos, auxiliar em cuidados domiciliares ou trabalhar com segurança junto a pessoas em fábricas — sentindo com confiança o que fazem, em vez de apenas adivinhar.
Citação: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Palavras-chave: pinça robótica, sensoriamento tátil, manipulação hábil, mão robótica, palma ativa