Clear Sky Science · pt
Aproveitando a propriocepção em asas moles aquáticas permite rejeição híbrida passiva-ativa de perturbações
Asas inteligentes debaixo d’água
Qualquer pessoa que já observou um pássaro pairar em um vento rajado ou um peixe se manter estável em uma correnteza rápida viu a natureza resolver um problema de engenharia difícil: como manter a rota quando o fluido ao redor se recusa a colaborar. Este estudo mostra como um novo tipo de asa subaquática macia, equipada com um “senso de si” semelhante à propriocepção animal, pode identificar automaticamente mudanças bruscas no escoamento e remodelar-se para permanecer estável. O trabalho aponta para robôs subaquáticos futuros que deslizam mais como animais e menos como máquinas rígidas, economizando energia enquanto lidam com mares agitados.
Aprendendo com aves e peixes
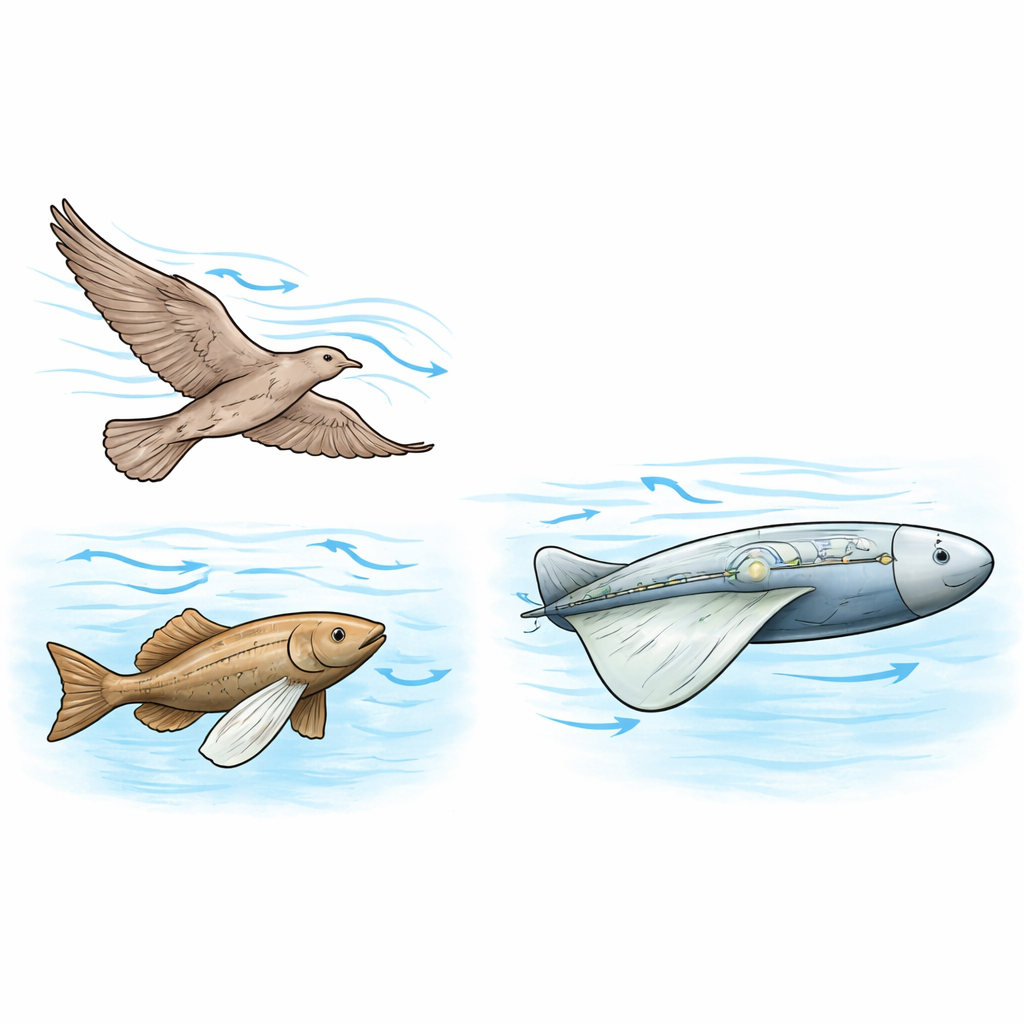
Na natureza, asas e barbatanas não são lâminas rígidas; elas se dobram, torcem e flexionam. Pássaros detectam o movimento do ar por meio de receptores minúsculos nas penas, enquanto peixes usam células sensíveis à pressão ao longo do corpo e nos raios das nadadeiras. Esses sensores integrados permitem que os animais sintam como seus apêndices se deformam em água ou ar em movimento e respondam quase instantaneamente, rejeitando rajadas e turbulência. Em contraste, a maioria dos veículos subaquáticos usa superfícies de controle rígidas e instrumentos separados para medir o fluxo, o que os torna lentos e gastadores de energia quando o ambiente se torna caótico. Os autores argumentam que combinar flexibilidade e sensoriamento em uma única estrutura macia pode reduzir essa lacuna.
Uma asa macia com sentidos integrados
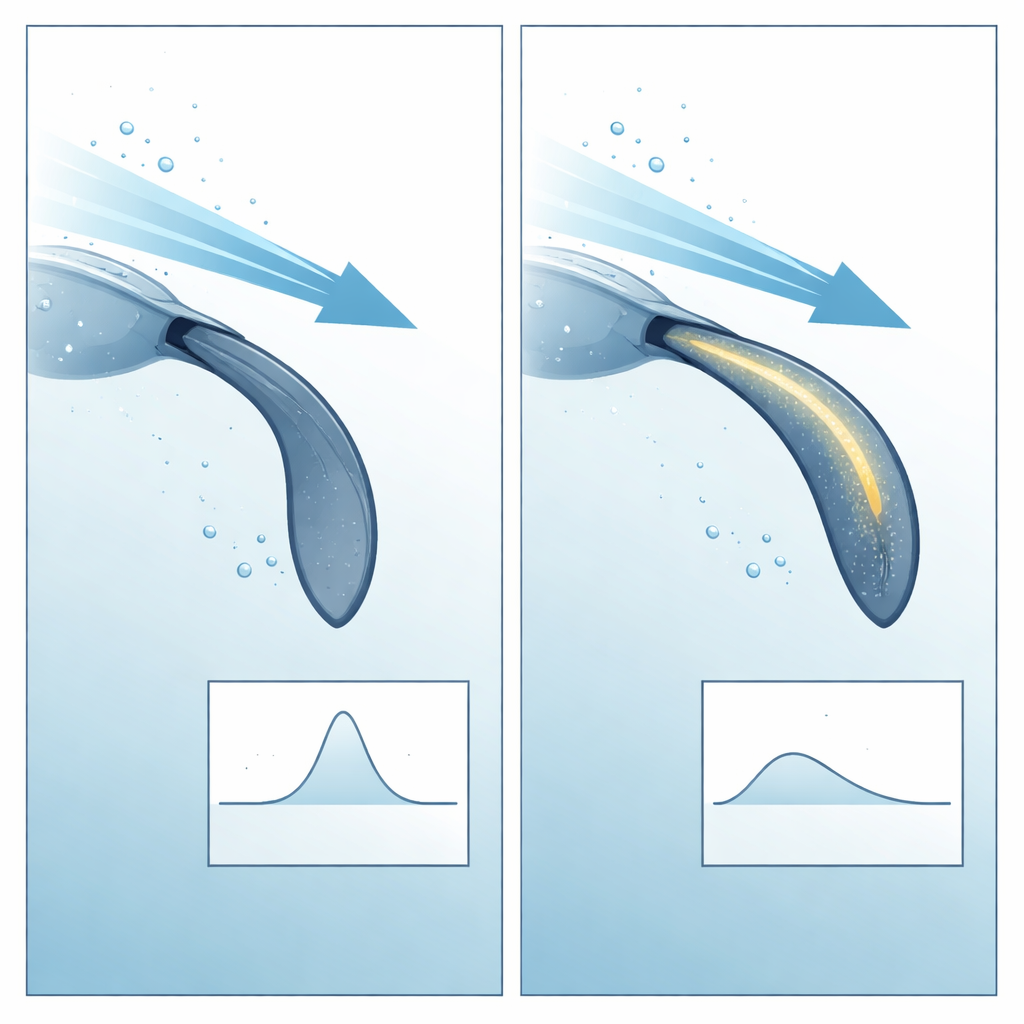
A equipe construiu uma meia-asa para uso subaquático que une uma cauda macia e flexível a um nariz rígido. Dentro da seção macia correm tubos infláveis preenchidos com líquido, que podem ser pressurizados para alterar a curvatura, ou camber, da asa. Por fora, eles colaram uma “pele” eletrônica fina feita de silicone e fios de metal líquido. À medida que a asa se dobra, o espaçamento entre esses condutores enterrados muda, alterando sua capacitância elétrica. Ao treinar um modelo simples de aprendizado de máquina para associar esses sinais às formas rastreadas por câmera, os pesquisadores transformaram a e-pele em um sensor de forma altamente preciso. Uma vez treinado, o sistema pode estimar o camber da asa em tempo real sem câmeras externas, mesmo quando submerso.
Convertendo forma em controle
Com essa asa proprioceptiva montada em um túnel de água, os pesquisadores simularam rajadas como mudanças repentinas no ângulo da asa em relação ao escoamento. Primeiro mostraram, em condições estacionárias, que ajustando o camber podiam produzir a mesma sustentação em diferentes ângulos de escoamento, ou sustentação diferente no mesmo ângulo. Isso significa que quando uma rajada tenta desnortear a asa, existe um “caminho” no espaço de formas que pode restaurar a sustentação desejada. Em seguida, programaram uma resposta idealizada em laço aberto—sabendo exatamente quando a rajada ocorreria—para inflar ou desinflar os tubos internos nos momentos corretos. Nesse cenário ideal, mudar o camber reduziu a queda de sustentação durante uma perturbação de cerca de 50% para aproximadamente 10%.
Deixando a asa reagir por conta própria
O teste mais exigente foi permitir que a asa decidisse por si quando algo estava errado. Aqui a e-pele detecta uma “assinatura” característica no sinal de camber: um rápido overshoot e oscilações enquanto o corpo macio flexiona sob uma mudança repentina no escoamento. Quando esse padrão aparece, um controlador simples infla os tubos na direção mais provável de trazer a sustentação de volta ao alvo, sem calcular explicitamente o fluxo ou as forças. Mesmo essa estratégia minimalista funciona bem. Comparada com uma asa rígida equivalente, a asa macia não atuada sozinha reduz o impulso de uma rajada—essencialmente, o empurrão total aplicado ao longo do tempo—em cerca de um fator três. Quando o controle ativo é acrescentado, o impulso indesejado total de sustentação é reduzido em até 87%, aproximando-se e mesmo superando a capacidade de lidar com rajadas relatada para algumas aves, embora em um meio diferente.
Por que isso importa para robôs do futuro
Para o leitor leigo, a conclusão principal é que tornar robôs subaquáticos mais macios e mais autoconscientes pode torná‑los tanto mais resistentes quanto mais eficientes. Em vez de combater perturbações com motores de força bruta e sensores externos complexos, o próprio corpo flexível do robô e sua pele embutida ajudam a absorver e ler o escoamento, disparando mudanças modestas de forma que o mantêm na trajetória. Embora este estudo se concentre em uma única asa experimental em um tanque controlado, os mesmos princípios poderiam ser aplicados a veículos completos ou a robôs que nadam como peixes. A longo prazo, essa “inteligência incorporada” pode permitir que máquinas explorem oceanos turbulentos com a mesma graça silenciosa que aves e peixes já exibem no ar e na água.
Citação: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Palavras-chave: robótica macia, veículos subaquáticos, design bioinspirado, rejeição de perturbações de fluxo, sensoriamento proprioceptivo