Clear Sky Science · pt
Percepção tátil incorporada das propriedades de objetos macios
Por que ensinar robôs a sentir importa
Imagine um robô examinando suavemente o abdômen de um paciente, selecionando frutas maduras sem machucá‑las ou montando peças frágeis apenas pelo toque. Para fazer qualquer uma dessas tarefas com segurança, os robôs precisam aprender a “sentir” objetos macios de forma rica e parecida com a humana. Este artigo descreve como pesquisadores construíram uma pele eletrônica e um novo tipo de modelo de aprendizado para que robôs percebam melhor a maciez, a forma e a textura da superfície de objetos fofos—aproximando as máquinas de um toque realmente hábil.
Construindo um sentido de toque de alta tecnologia
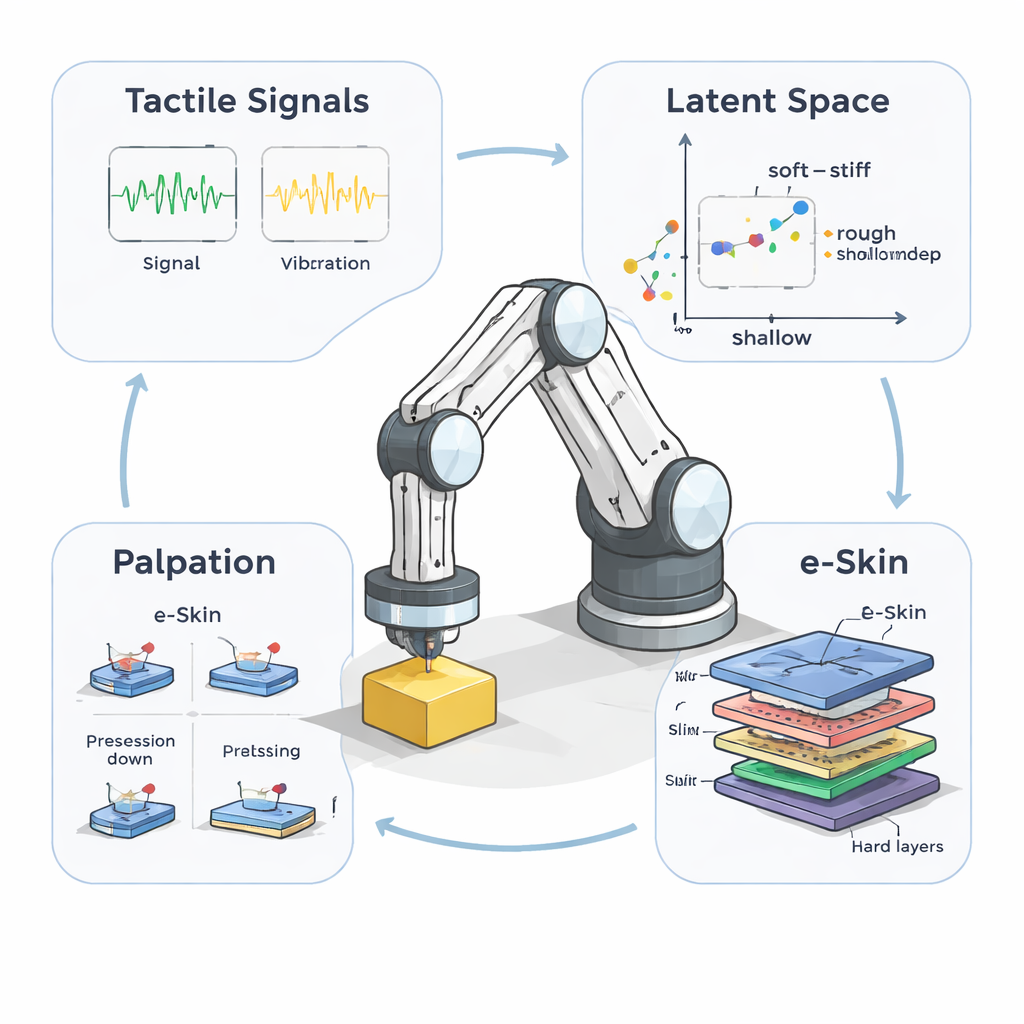
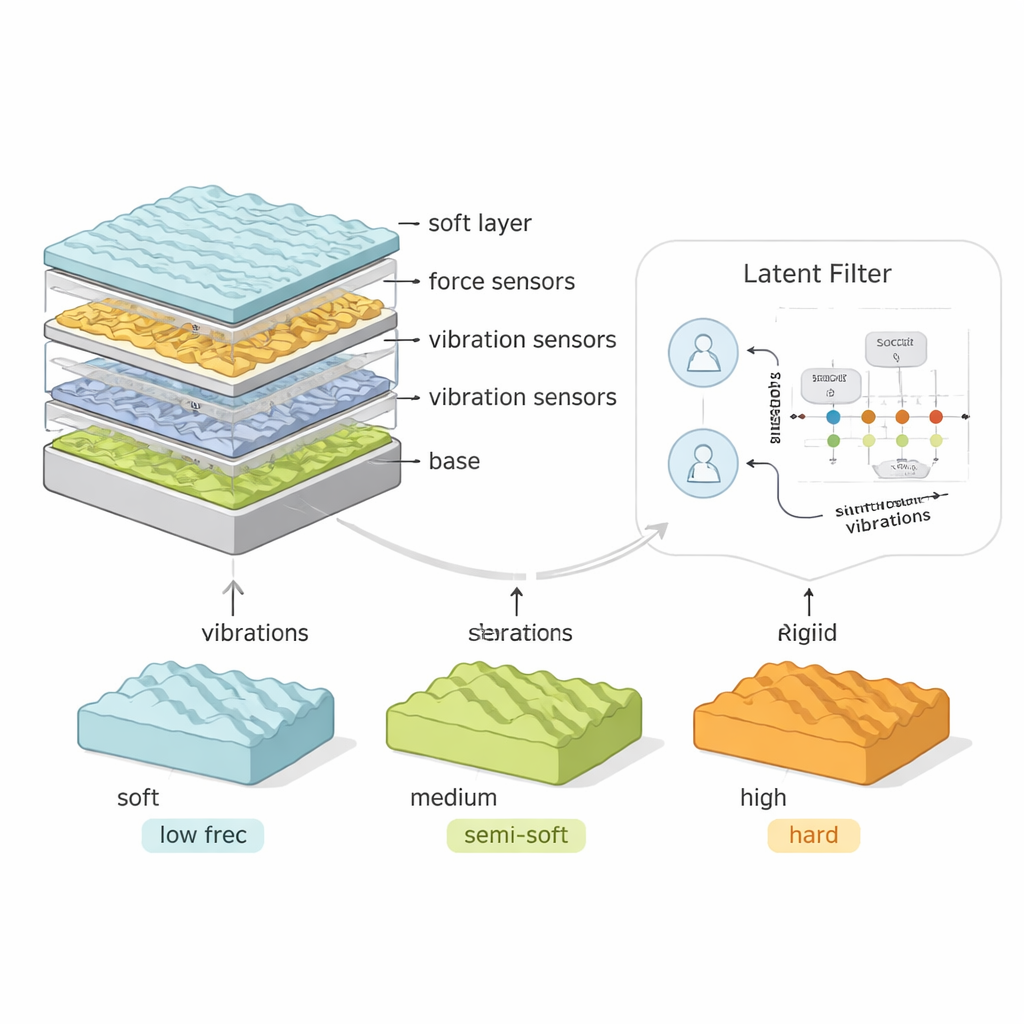
A pele humana é macia, em camadas e repleta de diferentes receptores táteis que reagem à pressão, ao estiramento e à vibração. A equipe procurou imitar essas habilidades em um robô. Eles criaram uma pele eletrônica modular, ou e‑Skin, feita de camadas empilhadas de silicone com sensores embutidos. Duas camadas contêm grades densas de sensores de força que medem o quanto a pele é pressionada em diferentes pontos, enquanto uma terceira camada abriga pequenos acelerômetros que captam vibrações rápidas, como o zumbido que se sente ao deslizar o dedo sobre um tecido áspero. Ao trocar tipos de silicone, eles podiam tornar a e‑Skin mais macia ou mais rígida, e ao ligar ou desligar camadas de sensores, podiam testar diferentes combinações de “órgãos sensoriais”.
Projetando um mundo de coisas macias
Para estudar o toque de forma controlada, os pesquisadores precisavam de mais do que blocos simples de borracha. Criaram uma biblioteca de “objetos de onda” com propriedades cuidadosamente ajustadas. Cada objeto tinha uma superfície superior ondulada cujos relevos podiam ser rasos ou altos (amplitude) e próximos ou distantes entre si (frequência espacial), e cada um foi moldado em materiais que iam de silicone muito macio a plástico rígido. Algumas amostras também escondiam uma fina camada rígida sob uma superfície macia, imitando tecidos ou materiais que mudam conforme se pressiona mais profundamente. Isso permitiu à equipe conhecer precisamente a maciez e a textura de cada objeto tocado pelo robô, para que pudessem comparar o que o robô “sentiu” com a verdade de referência.
Ensinando robôs a explorar pelo tato
Assim como as pessoas cutucam, pressionam e deslizam os dedos de maneiras diferentes para avaliar um objeto, o robô usou três movimentos básicos de palpação. Na pressão, ele movia‑se para cima e para baixo para sondar a maciez global. Na precessão, inclinava e rolava a e‑Skin, contactando várias regiões próximas e sondando formas mais complexas. No deslizamento, movia‑se lateralmente pela superfície para evidenciar texturas finas e atrito. Para cada objeto, o robô executou esses movimentos com profundidades e velocidades variadas, gerando milhares de sinais táteis ao longo do tempo—forças que mudam pela pele e vibrações que se propagam por ela. Esses fluxos de dados dinâmicos e ricos são muito mais informativos do que uma única cutucada estática.
Descobrindo padrões ocultos no toque
Para interpretar essa enxurrada de informação, os autores introduziram um modelo de aprendizado de máquina que chamam de Filtro Latente. Em vez de tentar rotular objetos diretamente, o modelo aprende um “mapa” interno onde cada ponto resume a interação contínua do robô com um objeto. Esse espaço latente é estruturado de modo que alguns componentes respondam rapidamente a sinais táteis imediatos, enquanto outros integram informação lentamente ao longo do tempo. Ao treinar o Filtro Latente com muitas interações, a equipe mostrou que esse mapa interno se alinha naturalmente com traços físicos significativos como rugosidade da superfície, altura dos relevos e rigidez—mesmo que o modelo nunca tenha sido explicitamente informado desses rótulos. Uma etapa separada de regressão confirmou que essas características ocultas podiam prever as propriedades mecânicas reais de um objeto com boa precisão.
Como pele, sentidos e movimento trabalham juntos
Os experimentos revelaram que nenhuma camada sensorial isolada ou estratégia de movimento é melhor para todas as situações. Combinar informações de vibração e força por meio de uma abordagem de “fusão tardia”—onde cada tipo de sinal é processado separadamente antes de ser mesclado—produziu a compreensão mais confiável de objetos macios. Duas camadas de força ajudaram o sistema a sentir cisalhamento e estiramento, vitais para detectar rigidez e estrutura interna oculta, enquanto vibrações foram especialmente úteis para sentir texturas finas durante o deslizamento. A maciez mecânica da própria e‑Skin também importou: peles mais rígidas eram melhores para medir rigidez geral e forma, enquanto peles mais macias se destacavam em captar variações sutis em materiais flexíveis ou em camadas. Os resultados sugerem que o toque robótico deve ser co‑projetado: as propriedades da pele, a eletrônica dos sensores e o modo como o robô se move precisam ser ajustados em conjunto.
O que isso significa para robôs do dia a dia
Ao unir uma e‑Skin em camadas, inspirada na humana, com um poderoso modelo de aprendizado que respeita o papel da ação, este trabalho mostra como robôs podem construir um sentido de toque mais profundo. Em vez de depender apenas de câmeras ou limiares simples de força, máquinas futuras poderiam sentir como um objeto cede, vibra e muda enquanto o exploram, e então ajustar sua pinça ou movimento em tempo real. Essas capacidades são fundamentais para aplicações como palpação médica, manipulação de alimentos macios e manuseio de itens deformáveis em casas e fábricas. Em termos simples, o estudo demonstra que, para tocar o mundo com a mesma eficácia que nós, os robôs precisam não só de bons sensores, mas também do “corpo” certo, dos hábitos de movimento corretos—e de uma forma inteligente de entrelaçar todas essas informações em uma compreensão coerente do que estão sentindo.
Citação: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Palavras-chave: toque robótico, pele eletrônica, detecção de objetos macios, percepção tátil, robótica incorporada