Clear Sky Science · pt
GenHand: retargeting cinemático generalizado de preensão humana
Ensinando Robôs a Segurar Coisas Como Nós
Desde pegar uma caneca de café até girar uma chave de fenda, nossas mãos fazem a manipulação de objetos parecer descomplicada. Robôs, no entanto, frequentemente têm dificuldade em agarrar itens cotidianos de forma confiável, especialmente quando suas pinças não se parecem em nada com uma mão humana. Este artigo apresenta o GenHand, um sistema que aprende a partir de movimentos de mãos humanas em imagens comuns e os converte em preensões estáveis e semelhantes às humanas para diferentes tipos de mãos robóticas.
Por Que Mãos Robóticas Precisam de Mais do que Movimentos de Copiar e Colar
Muitos sistemas atuais de teleoperação e aprendizado por imitação tentam copiar diretamente a pose da mão humana para a mão do robô. Eles igualam posições das pontas dos dedos e ângulos das articulações o mais fielmente possível. Isso funciona somente quando a mão robótica se assemelha muito à mão humana e tem número similar de dedos e articulações. Assim que a pinça do robô for mais simples — por exemplo, apenas dois dedos planos — a pose copiada pode deixar de criar uma preensão segura. Essas abordagens também ignoram em grande parte a forma do objeto e onde o contato sólido deve ocorrer, de modo que as preensões resultantes podem escorregar, perder o equilíbrio ou nunca tocar corretamente a superfície.
Olhando para Mãos e Objetos Juntos
O GenHand enfrenta esse problema ao focar na interação entre a mão e o objeto, não apenas na forma da mão. A partir de uma imagem RGB comum, o sistema reconstrói um modelo 3D detalhado do objeto e um modelo 3D paramétrico da mão humana. Ele usa uma rede neural para inferir a pose da mão e uma representação avançada de "distância assinada" para recuperar a superfície do objeto. A partir desse par de modelos, o GenHand determina onde as pontas dos dedos humanos de fato fazem contato e em quais direções exercem forças sobre o objeto. Em seguida, agrupa esses pontos de contato em um pequeno conjunto de regiões e direções de força significativas que resumem a estrutura essencial da preensão humana, filtrando detalhes desnecessários.
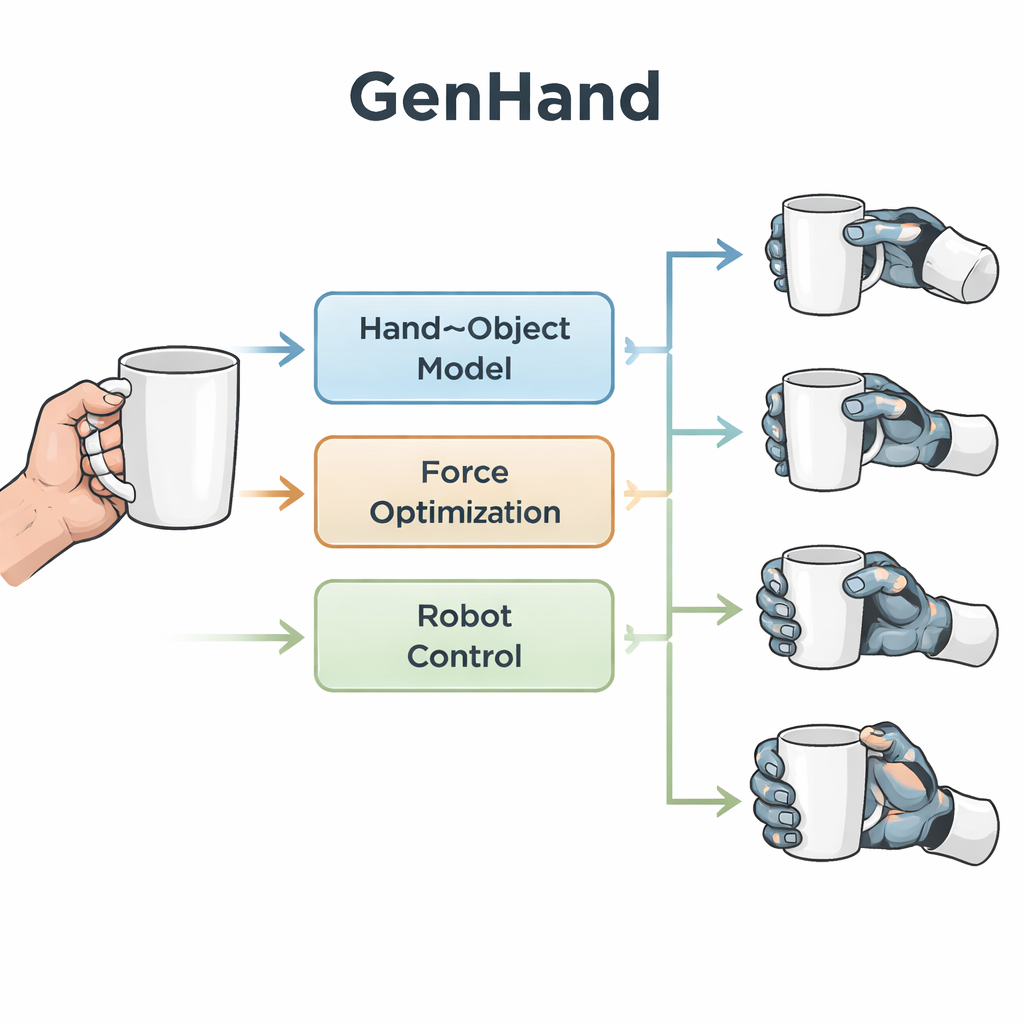
Reinventando a Preensão para Cada Robô
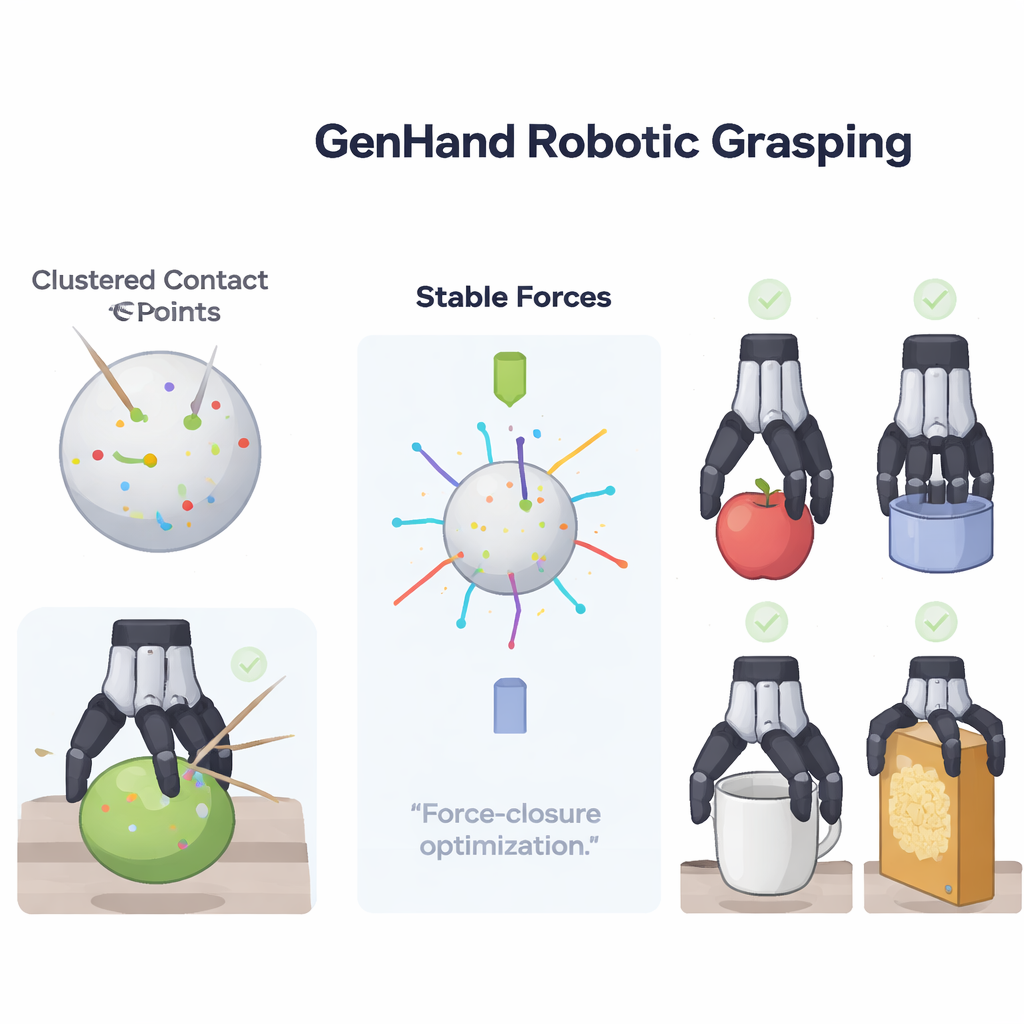
Quando o GenHand entende as principais regiões de contato e como elas sustentam o objeto, ele constrói um novo conjunto de "ancoras de contato" que se ajustam à pinça robótica em questão. Para uma pinça simples de dois dedos, ele pode manter apenas duas regiões de contato opostas, como um par de polegares apertando uma caixa. Para mãos mais hábeis, com três, quatro ou cinco dedos, pode atribuir âncoras adicionais para melhor reproduzir o rico padrão de contato da preensão humana. Um passo de otimização matemática então procura locais de contato na superfície do objeto que possam equilibrar forças e torques em todas as direções, uma propriedade conhecida como fechamento de forças. De forma crucial, o GenHand permanece próximo aos contatos humanos originais ao mesmo tempo que exige que a preensão resultante seja fisicamente estável no mundo real.
De Contatos Estáveis a Movimentos Reais do Robô
Com ancôras de contato estáveis definidas, uma segunda etapa de otimização encontra ângulos articulares reais e movimentos de pulso para o robô que possam realizar essas ancôras sem violar limites articulares ou causar colisões com o objeto. Para isso, o GenHand corresponde repetidamente os possíveis sítios de contato do robô às ancôras desejadas, ajusta a pose e verifica se os elos penetram o objeto. Esse processo é aplicado a uma variedade de mãos robóticas — desde uma pinça Robotiq de dois dedos até uma mão Shadow altamente articulada de cinco dedos — e testado em simulação física. Em comparação com uma linha de base líder que apenas imita a geometria das pontas dos dedos, o GenHand produz desequilíbrios de forças muito menores, contato de superfície mais preciso e taxas de sucesso significativamente maiores ao levantar e segurar 20 objetos cotidianos em diferentes condições de atrito.
Onde Isso Pode Levar Robôs do Dia a Dia
Para um leitor leigo, a conclusão é que o GenHand dá aos robôs um senso melhor de "como" segurar coisas, não apenas "onde" posicionar os dedos. Ao aprender com preensões humanas reais e impor regras básicas de estabilidade física, ele pode retargetear a mesma demonstração humana para mãos robóticas muito diferentes enquanto ainda alcança preensões sólidas e confiáveis. Isso facilita o controle de robôs teleoperados, ajuda sistemas de aprendizado a treinar com exemplos mais ricos e nos aproxima de robôs domésticos e de trabalho capazes de manipular de forma segura a mesma grande variedade de objetos que as pessoas manipulam.
Citação: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Palavras-chave: preensão robótica, teleoperação, demonstração humana, mãos robóticas, manipulação