Clear Sky Science · pt
Apertador robótico miniatura acessível impresso em 3D com câmera integrada para sensoriamento de força e torque baseado em visão
Por que pinças macias minúsculas importam
Robôs estão ficando menores e assumindo tarefas mais delicadas, desde montar engrenagens minúsculas até colher frutas maduras sem esmagá‑las. Mas a maioria das mãos robóticas ainda aperta às cegas, com pouca percepção da força aplicada. Este artigo apresenta uma pinça miniatura acessível, impressa em 3D e apelidada de “Seezer”, que pode tanto agarrar objetos frágeis quanto “sentir” forças usando uma pequena câmera dentro das pontas dos dedos em vez de sensores de força caros.
Uma mão gentil que vê
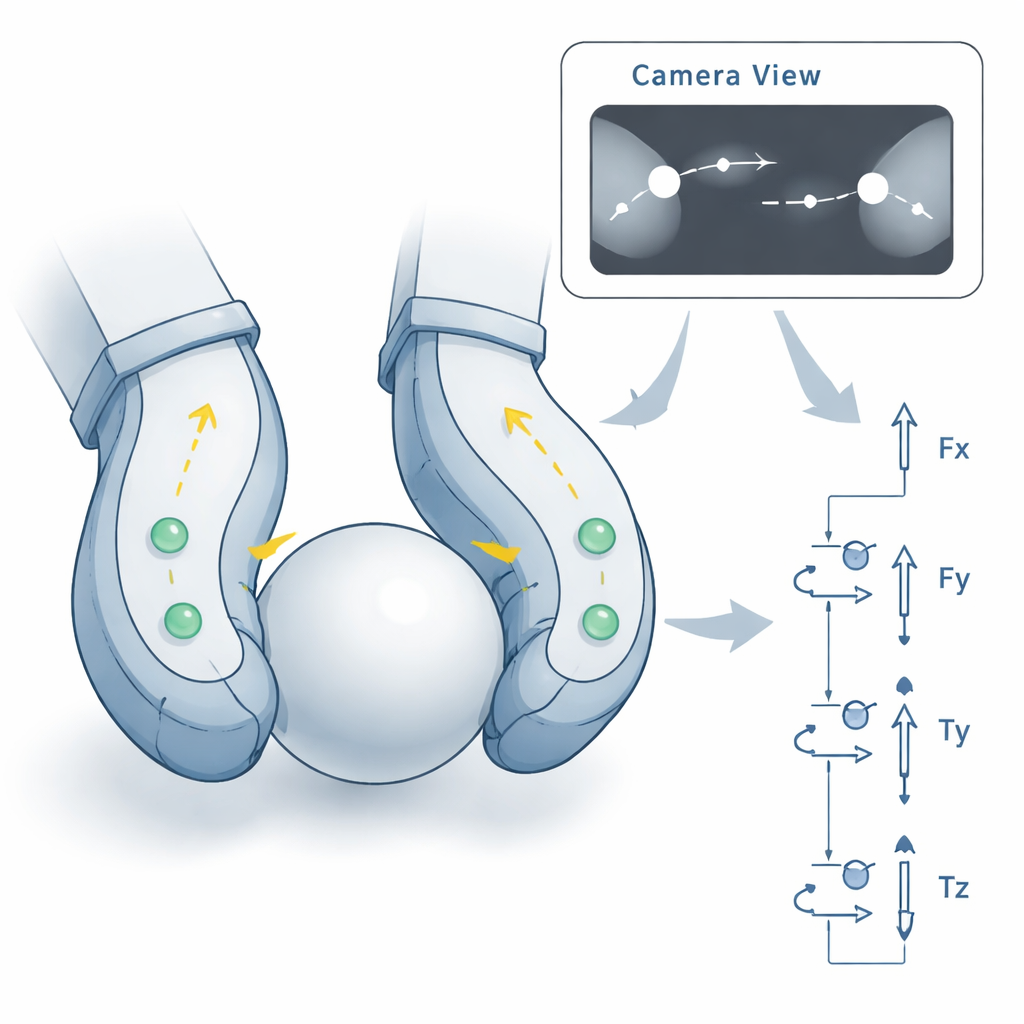
O Seezer é uma pinça robótica macia e compliance cujos dedos flexionam em vez de articular como um alicate metálico. A ideia central é construir quase tudo em uma única peça numa impressora 3D de consumo: uma peça monolítica do dedo que inclui juntas flexíveis, formas de ponta adaptadas à tarefa e pequenos marcadores integrados. Esse módulo descartável de dedo desliza sobre uma unidade de motor compacta que abriga uma câmera miniatura e luzes. À medida que o motor gira uma engrenagem sem-fim, as juntas flexíveis se curvam e os dedos fecham ao redor do objeto, enquanto a câmera observa as pontas dos dedos e o espaço à frente da pinça.

Lendo força a partir das dobras do dedo
Em vez de embutir fios, extensômetros ou almofadas de pressão nos dedos, o Seezer pinta o interior com pistas visuais ricas em informação. Cada ponta carrega pequenos marcadores circulares “fiduciais” cuja posição na imagem da câmera muda sempre que o dedo se deforma. O software primeiro detecta e rastreia esses marcadores em cada quadro. Em seguida, com base numa curta sequência de calibração, modelos matemáticos simples aprendem como deslocamentos na posição dos marcadores se relacionam com as forças reais de empurrar e puxar em cada ponta. Ao combinar as forças das três pontas com princípios físicos básicos, o sistema estima as forças e torques totais na pinça nas seis direções, bem como a força de aperto entre os dedos.
Quão bem ele sente forças
Para verificar a precisão desse sensoriamento baseado em câmera, os autores compararam as estimativas do Seezer com leituras de um sensosr comercial de força/torque de alta precisão em um ambiente de laboratório controlado. Com uma versão do projeto do dedo (pontas mais rígidas), a pinça mediu forças de preensão de até cerca de 1,1 newton com erros típicos entre 8% e 17%, e forças e torques de seis eixos com erros na maioria entre 8% e 24%. Uma versão com ponta mais macia trocou força máxima por maior sensibilidade, produzindo forças menores mas ainda com erros percentuais comparáveis. Importante: os modelos precisaram de apenas 31 a 141 pontos de calibração — muito menos do que os milhares de imagens frequentemente exigidos por métodos de deep learning que operam em quadros completos da câmera.
De engrenagens minúsculas a frutas macias
Duas tarefas de demonstração destacam o que essa pinça pode fazer em cenários do mundo real. Em uma, o Seezer repetidamente retirou pequenas engrenagens impressas em 3D de eixos, moveu‑as e as recolocou, usando a câmera interna tanto para alinhar a chaveta da engrenagem com o eixo quanto para monitorar o movimento dos dedos. Isso imita trabalho industrial fino em espaços apertados. Em outra, a pinça colheu groselhas vermelhas de seus ramos. Ali, o sistema monitorou sua estimativa de força de preensão em tempo real e parou de fechar quando um limite de força pré‑definido foi alcançado, de modo que a fruta fosse destacada sem ser esmagada. Ambos os exemplos rodaram em eletrônica de baixo custo e demonstraram que um único projeto podia manipular objetos rígidos e macios de alguns milímetros de tamanho.
Desafios e usos futuros
O Seezer ainda é um protótipo e tem limitações. O rastreamento de marcadores funciona melhor em cenas estáveis, bem iluminadas e com fundo pouco poluído; mudanças na iluminação, superfícies brilhantes e movimentos complexos podem causar erros de rastreamento. A taxa de quadros modesta da câmera também limita a rapidez com que o sistema pode reagir para controle de força apertado ou feedback háptico rico. Os materiais dos dedos podem fatigarem ou mudar de comportamento com uso prolongado, e a equipe ainda não testou sistematicamente o desempenho ao longo de longos períodos. Os autores argumentam que algoritmos de rastreamento mais robustos ou a combinação do hardware com estimadores de força modernos baseados em deep learning poderiam aumentar precisão e confiabilidade, enquanto avanços na impressão 3D deveriam permitir maior miniaturização e pontas descartáveis esterilizáveis para uso cirúrgico ou em laboratório.
O que isso significa para a robótica do dia a dia
Em termos simples, este trabalho mostra que uma mão robótica pequena e barata pode ver e sentir observando como seus próprios dedos macios se dobram. Com apenas dados de calibração modestos e peças prontas do mercado, o Seezer estima quão forte está apertando e em que direção atuam forças de contato e torques — com precisão suficiente para tarefas de manuseio delicado. Se sua robustez for aprimorada, a mesma abordagem poderia ajudar robôs futuros a manipular objetos pequenos e frágeis — como dispositivos médicos, eletrônicos, frutas ou até tecido em cirurgias minimamente invasivas — sem sensores volumosos ou hardware complexo, levando toque sensível a lugares onde espaço e custo são limitados.
Citação: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Palavras-chave: pinça robótica macia, sensoriamento de força baseado em visão, robótica impressa em 3D, manipulação em miniatura, feedback háptico