Clear Sky Science · pt
Avanços em robótica macia: progressos recentes em atuadores dielétricos de elastômero e fluidos
Robôs macios que se movem mais como músculos
Imagine um robô que possa abraçar com segurança uma criança, atravessar escombros em um prédio desabado ou massagear delicadamente um coração em falha. Para realizar essas tarefas, as máquinas devem dobrar e esticar como tecido vivo, não chiar como metal. Este artigo de revisão explica como uma nova classe de “músculos” elétricos macios — feitos de sólidos e líquidos emborrachados — está aproximando essa visão da realidade, e quais desafios permanecem antes que saiam do laboratório e entrem na vida cotidiana.
De motores rígidos a músculos elétricos macios
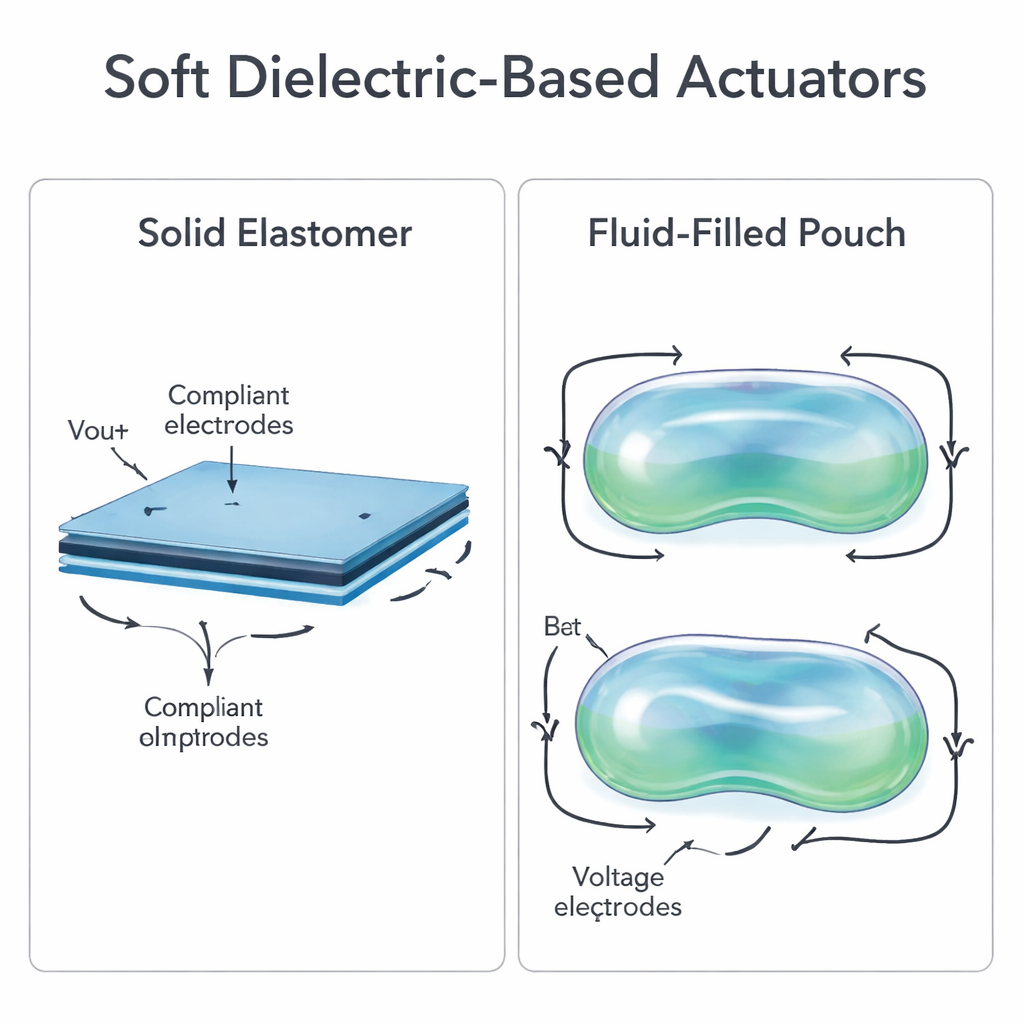
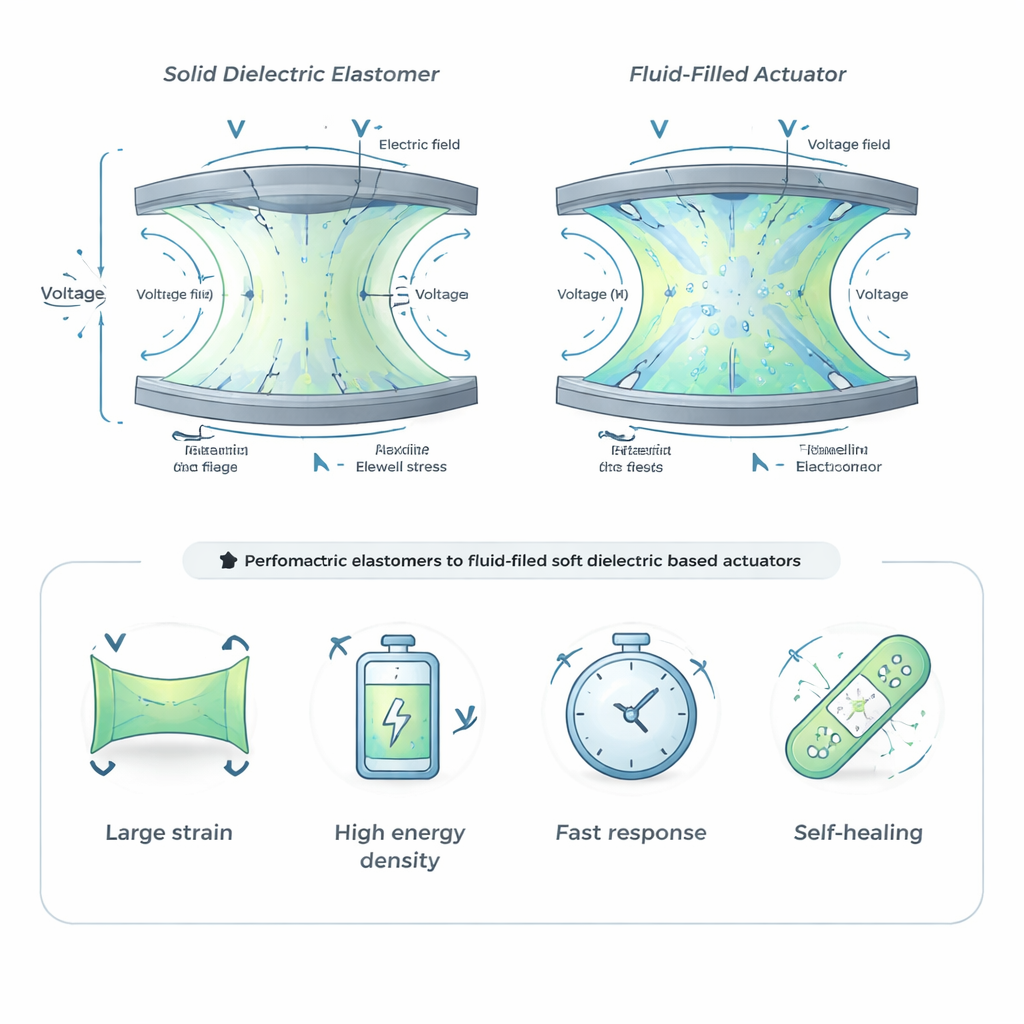
A maioria dos robôs industriais depende de motores pesados e rígidos e engrenagens. Eles são potentes e precisos, mas também caros, frágeis e potencialmente perigosos perto de pessoas. Robôs macios, construídos a partir de materiais elásticos semelhantes a assadeiras de silicone ou elásticos, trocam força bruta por gentileza, adaptabilidade e resiliência. O foco deste artigo são atuadores macios acionados pela eletricidade: atuadores de elastômero dielétrico (DEAs), que usam uma camada sólida de borracha, e atuadores de fluido dielétrico (DFAs), que usam um líquido isolante eletricamente selado em uma bolsa flexível. Em ambos os casos, aplicar uma tensão entre dois eletrodos conformáveis comprime o material por forças eletrostáticas e converte energia elétrica diretamente em movimento, com grande deformação, alta densidade de energia e resposta rápida.
Como os materiais fazem os músculos funcionarem
Para se comportarem como músculos úteis, esses dispositivos precisam de materiais muito específicos. Nos DEAs, a folha central de borracha deve ser extremamente macia para se esticar facilmente, mas também suportar campos elétricos elevados sem rasgar ou provocar curto. Os pesquisadores equilibram esses requisitos com duas estratégias principais. Uma é projetar novos polímeros — de acrílicos, silicones e poliuretanos a copolímeros em bloco mais exóticos — que incorporem muitos grupos químicos polares (que aumentam a resposta elétrica) em redes flexíveis de baixa rigidez. A outra é criar compósitos misturando partículas minúsculas ou líquidos que elevem a capacidade do material de armazenar energia elétrica. Pensamento semelhante orienta o desenho dos DFAs: engenheiros escolhem óleos e outros líquidos dielétricos com viscosidade, estabilidade e compatibilidade adequadas com invólucros finos de plástico ou silicone, para que a tensão possa deslocar rapidamente o fluido e gerar saliências, batidas e vibrações sem vazamentos ou degradação química.
Construir e acionar atuadores macios em escala
Transformar esses materiais engenhosos em dispositivos confiáveis é um desafio de engenharia por si só. A fabricação tradicional frequentemente envolve etapas manuais demoradas: esticar filmes finos em armações, pintar ou imprimir eletrodos macios, empilhar camadas e — no caso dos DFAs — injetar líquido e selar a bolsa. O artigo revisa rotas de manufatura mais recentes, como impressão jato de tinta e serigráfica, extrusão de músculos em fibras e impressão 3D multimaterial que pode depositar eletrodos e dielétricos de uma só vez. Explica também como diferentes formas geram movimentos distintos: chapas planas que aumentam de área, domos que saltam, cilindros enrolados que se contraem ao longo do eixo e estruturas que dobram ou vibram. Como esses materiais podem envelhecer, vazar ou falhar por ruptura elétrica, os autores resumem estudos de vida útil e modos comuns de falha, e destacam o impulso por designs autorreparáveis que possam se recuperar após uma faísca ou perfuração.
Controle mais inteligente e usos emergentes
Como músculos naturais, atuadores macios precisam ser controlados. Esquemas simples em malha aberta apenas aplicam um padrão de tensão, mas isso pode derivar conforme o material aquece ou sofre fluência. Abordagens mais avançadas incorporam sensores — ou usam os próprios sinais elétricos do atuador — para medir deformação, força ou vibração em tempo real e ajustar o sinal de acionamento. Pesquisadores experimentam agora controladores com aprendizado de máquina e aprendizado por reforço que podem lidar com o comportamento não linear e dependente da história dos materiais macios. No lado das aplicações, o artigo percorre uma paisagem ampla: músculos artificiais que levantam muitas vezes seu próprio peso, robôs que nadam ou voam em formas de peixe e inseto, faixas hápticas vestíveis e almofadas para a ponta dos dedos que fornecem feedback tátil realista, lentes de zoom e peles que moldam a luz inspiradas em lulas e olhos humanos, superfícies que mudam de forma e dispositivos médicos conceituais que um dia podem ajudar corações em falha ou faces paralisadas.
O que ainda separa demonstrações de laboratório de robôs do mundo real
Apesar de todo o potencial, esses músculos elétricos ainda enfrentam obstáculos antes de poderem alimentar com segurança ajudantes domésticos, implantes médicos ou wearables de massa. Muitos exigem tensões de operação na faixa de quilovolts, o que complica segurança e eletrônica. Materiais que se comportam bem em testes curtos podem endurecer, ressecar ou falhar após milhões de ciclos. A fabricação costuma ser lenta e inconsistente para produção em larga escala. E continua difícil reciclar ou biodegradar a maioria dos polímeros atuais. Os autores defendem que o progresso dependerá do co‑design em várias escalas: novos materiais macios que combinem baixa rigidez, alta resposta elétrica, robustez e até autorreparo; manufatura e testes automatizados e orientados por dados; e sistemas de controle que explorem sensores incorporados e IA leve. Juntos, esses avanços poderiam dar aos robôs futuros músculos que não sejam apenas fortes e rápidos, mas também seguros, adaptativos e sustentáveis.
Citação: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Palavras-chave: robótica macia, atuadores de elastômero dielétrico, atuadores de fluido dielétrico, músculos artificiais, interfaces hápticas