Clear Sky Science · pt
Controle preditivo em jogo para assistência interativa personalizada e dirigida
Robôs que parecem bons parceiros de treino
Imagine um parceiro de treino ou fisioterapeuta que sempre sabe quando ajudar a levantar, quando deixar você se esforçar um pouco e quão rápido você pretende se mover a seguir. Este artigo mostra como dar a robôs de contato — como exoesqueletos usados na reabilitação ou em fábricas — um tipo semelhante de intuição. Ao "adivinhar" matematicamente como a pessoa pretende se mover nos próximos um ou dois segundos, o robô pode compartilhar o esforço de forma suave, reduzir a fadiga e orientar sutilmente como as pessoas se movem e aprendem.
Por que compartilhar o esforço com robôs é difícil
Quando um robô está fisicamente ligado a uma pessoa — ajudando-a a mover um membro ou carregar um objeto pesado — ambos estão constantemente empurrando e reagindo. Controladores robóticos tradicionais em grande parte ignoram o que o humano planeja fazer; eles apenas perseguem metas de desempenho como precisão ou economia de energia. Isso pode tornar o robô ou muito rígido e autoritário, ou muito passivo e inútil. Parceiros humanos reais se saem melhor: eles percebem como o outro está se movendo, adaptam-se às suas capacidades e encorajam comportamentos diversos, desde relaxamento até esforço intenso. Os autores argumentam que, para aproximar os robôs desse tipo de interação, o robô deve modelar explicitamente como o humano planeja movimentos e quanto esforço está disposto a investir.
Uma visão de teoria dos jogos da interação humano–robô
Os pesquisadores se baseiam na teoria dos jogos — a matemática da interação estratégica — para tratar o humano e o robô como dois "jogadores" que compartilham a mesma tarefa. Cada um tem seus próprios objetivos: o humano quer acompanhar o movimento desejado gastando o mínimo de esforço possível, e o robô quer ajudar a acompanhar o movimento reduzindo também o esforço da pessoa. É crucial que ambos são assumidos como olhando apenas um curto período adiante, numa janela de planejamento finita de cerca de um a dois segundos, refletindo como as pessoas naturalmente planejam movimentos. Dentro dessa janela, a equipe deriva uma fórmula compacta para um equilíbrio de Nash: um padrão equilibrado de forças em que nem o humano nem o robô podem melhorar seu resultado sem que o outro também mude. Esse equilíbrio define quanto cada um deve empurrar a cada momento.
Ensinando o robô a ler a intenção humana
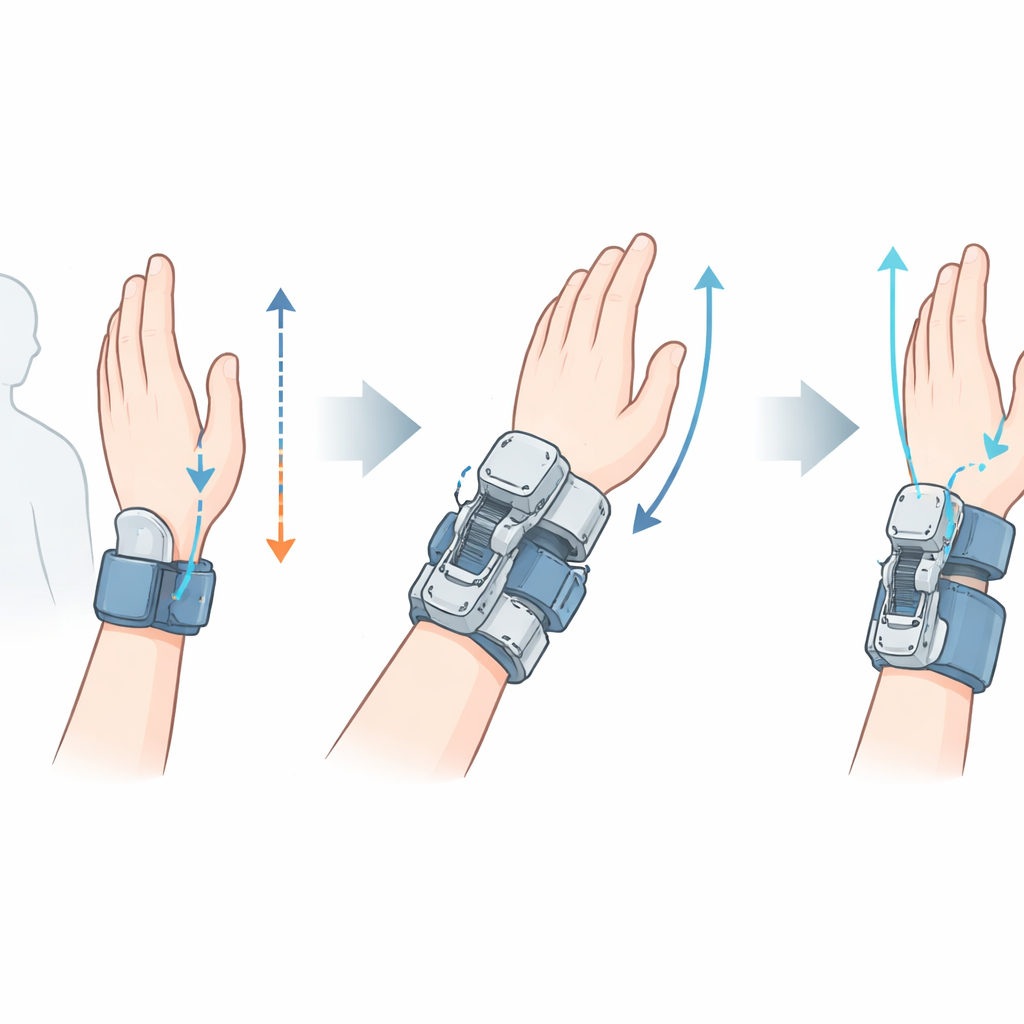
Para que o robô jogue esse "jogo do movimento", ele primeiro precisa inferir quão fortemente o humano valoriza precisão em relação ao esforço — uma preferência oculta que varia de pessoa para pessoa e mesmo ao longo do tempo. Os autores resolvem isso com uma abordagem de jogo inverso. À medida que a pessoa se move, sensores medem o ângulo das articulações e o torque que ela produz. O controlador então busca repetidamente o conjunto de preferências humanas que melhor explicaria o histórico recente de movimentos e forças. Com essas preferências em mãos, ele prevê como o humano provavelmente agirá no próximo horizonte curto e calcula a força assistiva ótima do robô. Tudo isso roda em tempo real em um exoesqueleto de punho que auxilia os sujeitos a acompanhar um alvo móvel com a mão.
Humanos e robôs aprendem a coordenar
A equipe testou seu controlador com trinta adultos saudáveis em três experimentos. No primeiro, as pessoas foram instruídas a alternar entre seguir ativamente o alvo e permanecer passivas. O controlador ajustou rapidamente sua estimativa interna de quanto a pessoa se importava com a precisão, aumentando durante as fases ativas e caindo quase a zero quando elas relaxavam. No segundo experimento, os participantes alternaram entre tentativas com e sem assistência robótica. Com o novo controlador, o robô reduziu o esforço articular e a atividade muscular humana, ao mesmo tempo em que melhorou a precisão do acompanhamento. Ao longo de tentativas repetidas, o padrão de interação de cada pessoa estabilizou em um "equilíbrio" individual e estável, e a correlação entre forças humanas e robóticas aumentou — evidência de entendimento mútuo crescente. No terceiro experimento, os pesquisadores introduziram um único botão de assistência, um meta-parâmetro que altera quão fortemente o robô tenta minimizar o esforço da pessoa. Girar esse botão mudou suavemente quanto esforço os humanos escolhiam contribuir, sem degradar o desempenho da tarefa.
Guiando o comportamento com um único botão
O meta-parâmetro de assistência permite aos projetistas cobrir um espectro de estilos de interação com um único controle: desde quase nenhuma ajuda, passando por compartilhamento equilibrado de esforço, até suporte quase completo onde o robô lidera e o humano pode relaxar. Em configurações intermediárias, os humanos tendiam a coordenar melhor com o robô, cada um assumindo aproximadamente metade da carga. O padrão de preferências humanas inferidas manteve-se consistente para cada pessoa através de diferentes níveis de assistência — exceto quando o robô fazia quase tudo, ponto em que os comportamentos se tornaram mais uniformes porque as pessoas em grande parte deixaram de se engajar. Isso mostra que o robô pode tanto descobrir estilos individuais de controle quanto incliná-los suavemente, por exemplo, pedindo aos usuários que façam mais em uma fase de treino e menos em outra.
O que isso significa para reabilitação e trabalho
Para um leitor leigo, a mensagem principal é que esse controlador faz os robôs agirem mais como parceiros inteligentes do que como máquinas rígidas. Ao prever como pretendemos nos mover e ajustar quanto ajudam, os robôs podem reduzir nosso esforço quando necessário, nos encorajar a trabalhar mais quando útil e manter os movimentos precisos e estáveis. O mesmo arcabouço matemático pode ser ajustado para reabilitação — transferindo gradualmente o esforço do robô para o paciente — ou para manufatura colaborativa, onde pessoas e robôs compartilham cargas de forma segura e eficiente. Em essência, o estudo mostra que as pessoas se adaptam naturalmente a um robô que “joga o mesmo jogo” que elas, abrindo a porta para formas de assistência interativa mais personalizadas e direcionadas.
Citação: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Palavras-chave: interação humano-robô, assistência por exoesqueleto, controle teórico dos jogos, reabilitação motora, controle compartilhado