Clear Sky Science · pt
Rastreamento e controle de dispositivos médicos miniaturizados guiados por raios X sintéticos
Ferramentas menores, cirurgias mais seguras
Cirurgiões começaram a usar ferramentas médicas minúsculas e sem fios que podem rastejar por vasos sanguíneos e outras passagens estreitas para entregar medicamentos, desobstruir artérias bloqueadas ou medir sinais vitais profundamente dentro do corpo. Esses dispositivos miniaturizados prometem procedimentos menos agressivos e recuperação mais rápida — mas somente se os médicos conseguirem vê‑los e guiá‑los com segurança em tempo real. Este artigo apresenta o MicroSyn‑X, uma nova forma de treinar computadores para rastrear esses minúsculos dispositivos em imagens de raios X, abrindo caminho para cirurgias mais precisas e menos invasivas.
O problema dos ajudantes invisíveis
A ferramenta de imagem cirúrgica mais usada hoje é a fluoroscopia por raios X, que mostra sombras em movimento de ossos, vasos e instrumentos na tela. No entanto, os dispositivos miniaturizados são tão pequenos e pouco nítidos que frequentemente se misturam ao fundo ruidoso. Podem ser ocultados por osso, instrumentos metálicos ou contrastes, e os robôs macios ou líquidos mudam constantemente de forma enquanto se movem. Operadores humanos precisam observar a tela atentamente e ajustar ímãs ou cateteres manualmente — um processo lento e cansativo que aumenta o risco de erros. Treinar visão computacional — software que pode “ver” por conta própria — poderia ajudar, mas geralmente exige enormes coleções de imagens cuidadosamente etiquetadas. Para esses novos dispositivos, tais conjuntos de dados praticamente não existem porque coletá‑los é caro, demorado e limitado pela privacidade dos pacientes.
Ensinando computadores com raios X falsos, porém fiéis
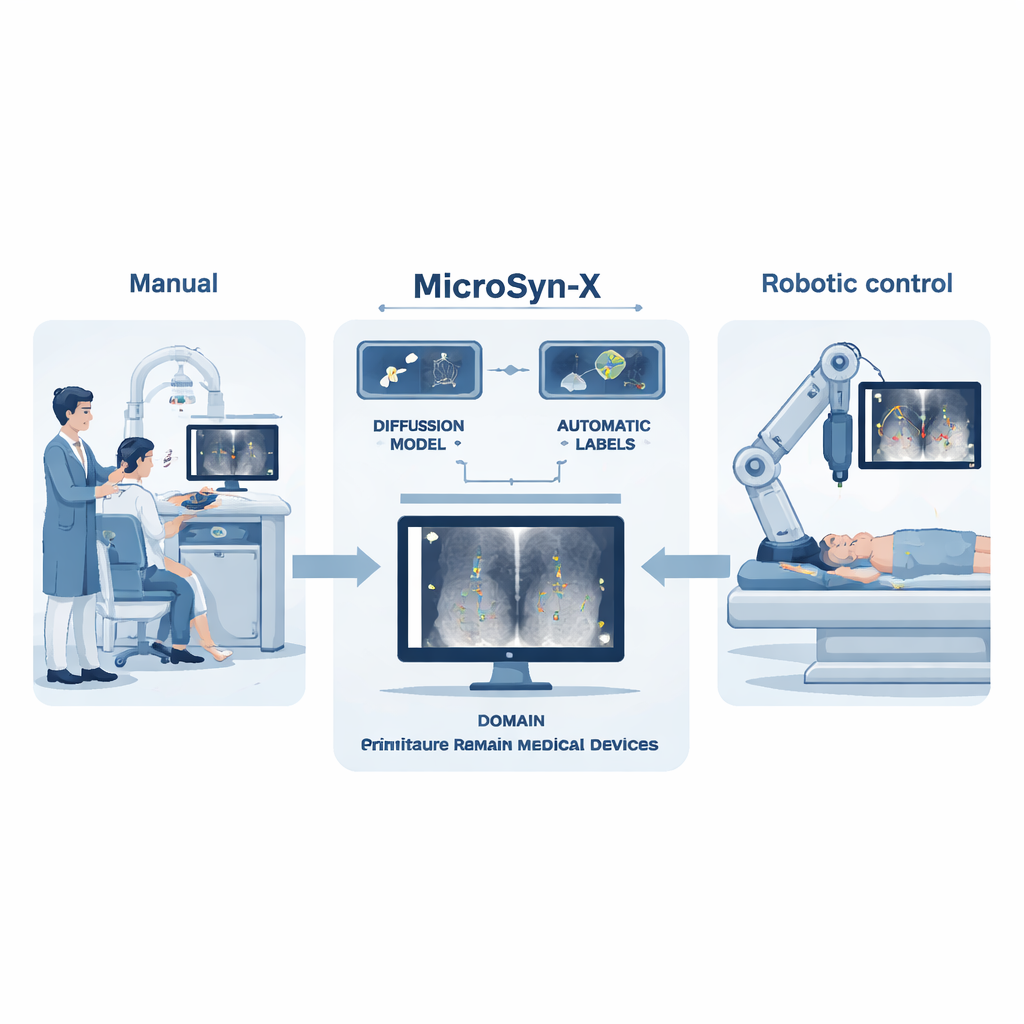
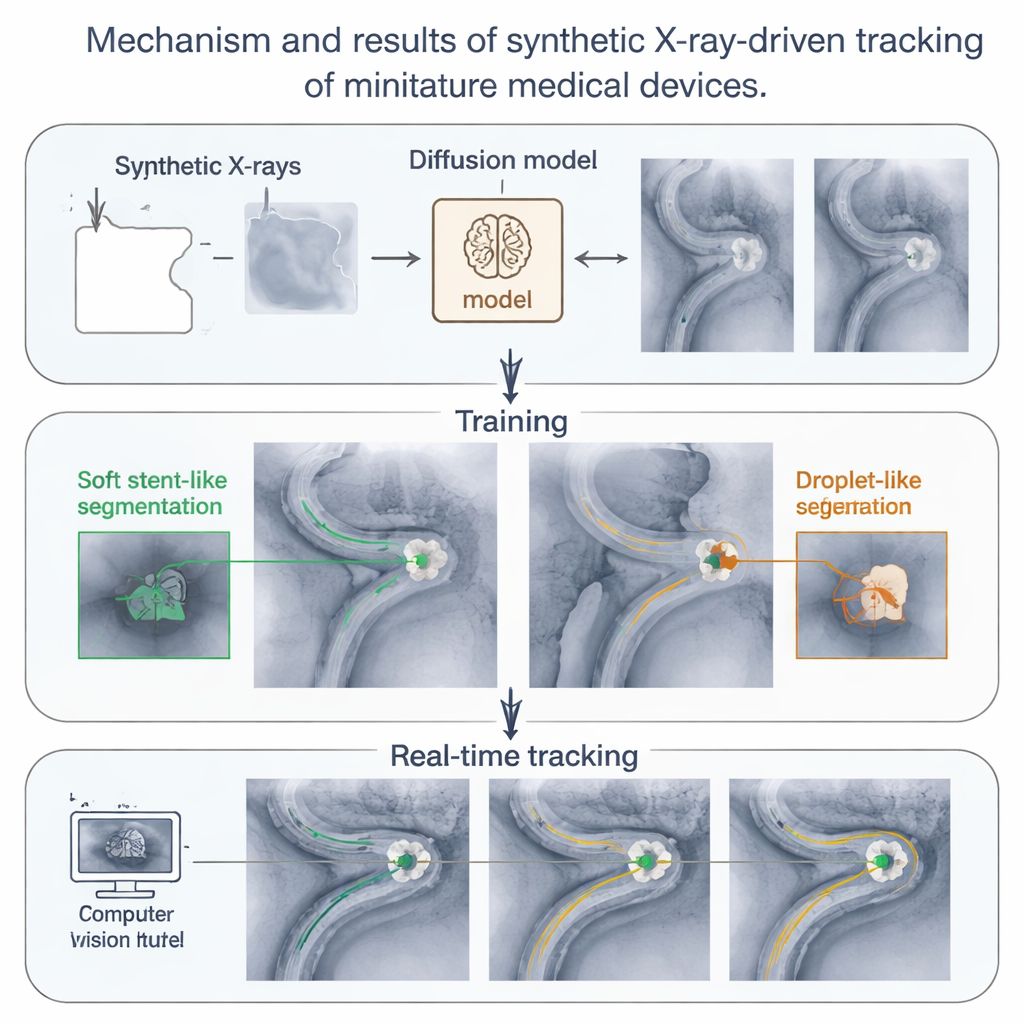
O MicroSyn‑X resolve esse gargalo de dados criando suas próprias imagens de raios X altamente realistas, completas com rótulos embutidos que indicam exatamente onde cada dispositivo está. Primeiro, o sistema usa um gerador de imagem moderno chamado modelo de difusão para produzir fundos de raios X verossímeis de órgãos, ossos e ferramentas cirúrgicas, guiado por prompts simples e máscaras grosseiras que delineiam tecido, metal e canais preenchidos por fluidos. Em seguida, imagens dos dispositivos miniaturizados — fotografadas uma vez em fundo limpo ou desenhadas matematicamente no caso de gotas líquidas — são combinadas digitalmente nessas cenas de modo a parecer que realmente estavam dentro do corpo. Como o computador sabe exatamente onde cada dispositivo foi colocado, ele gera automaticamente contornos precisos e caixas delimitadoras, eliminando a rotulagem humana tediosa.
Preparando para o mundo real com caos controlado
Uma inovação chave do MicroSyn‑X é a “randomização de domínio”, uma injeção deliberada de variedade nas imagens sintéticas. O sistema altera automaticamente formas de órgãos, posições dos dispositivos, brilho, nível de ruído e até o quanto os dispositivos são ocultos por ossos ou ferramentas. Também cria muitas formas diferentes para robôs líquidos, que podem alongar, dividir‑se em enxames e reunir‑se. Ao confrontar o algoritmo de aprendizado com milhares de situações ligeiramente diferentes — muitas das quais são raras ou impraticáveis de capturar em pacientes reais — os autores treinam modelos que se concentram nos sinais visuais essenciais dos dispositivos em vez de padrões superficiais. Testes mostram que modelos treinados puramente nessas imagens sintéticas podem igualar ou superar modelos treinados em raios X reais, especialmente em casos difíceis com baixo contraste, muito ruído ou forte oclusão.
Da tela do computador ao robô na sala de cirurgia
Os pesquisadores vão além de demonstrações em software e conectam o MicroSyn‑X diretamente a um sistema robótico. Um braço robótico mantém um ímã forte próximo ao tecido enquanto um fluoroscópio em C captura imagens de raios X. O modelo de visão treinado com MicroSyn‑X encontra stents macios em forma de bastão e gotas líquidas em cada quadro, e um algoritmo de rastreamento costura essas detecções em trajetórias suaves, mesmo quando os dispositivos desaparecem brevemente atrás do osso. Usando esse feedback, o robô guia dispositivos por vasos artificiais tortuosos, órgãos reais de animais fora do corpo e artérias vivas em coelhos e ratos. O sistema consegue direcionar múltiplos dispositivos simultaneamente, segui‑los através de vasos ramificados e monitorar enxames de gotas líquidas que se dividem e se fundem sob controle magnético — tudo em tempo real sob condições de imagem desafiadoras.
Rumo a um cuidado mais inteligente e menos invasivo
Em termos simples, este trabalho mostra que computadores podem aprender a rastrear ferramentas cirúrgicas minúsculas com segurança dentro do corpo praticando em vastas bibliotecas de raios X “falsos” cuidadosamente elaborados em vez de depender de imagens reais escassas. O MicroSyn‑X transforma imagem sintética em um motor prático para robótica: cria dados realistas de treinamento, ensina modelos de visão e alimenta sua saída em um sistema de navegação magnética que já funcionou em animais vivos. À medida que esses métodos amadurecem e são testados em casos mais complexos, poderão ajudar cirurgiões a realizar procedimentos delicados com maior precisão e menos esforço, aproximando‑nos de um futuro em que frotas de robôs miniaturizados melhorem silenciosamente o tratamento de dentro para fora.
Citação: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Palavras-chave: dispositivos médicos miniaturizados, imagem por raios X, dados sintéticos, robótica médica, visão computacional