Clear Sky Science · pt
Sistema de filtragem de Kalman em múltiplas etapas para fusão de sensores integrado com memtransistor de MoS2 apresentando 1024 níveis de condutância
Sensoriamento mais inteligente para carros autônomos mais seguros
Os carros autônomos modernos dependem de um conjunto de sensores para entender a via, mas combinar todas essas informações de forma rápida e eficiente é notoriamente difícil. Este estudo demonstra como um novo tipo de dispositivo eletrônico minúsculo, chamado memtransistor, pode acelerar e simplificar esse processo de integração de dados, conhecido como fusão de sensores. Ao mover cálculos-chave de chips digitais volumosos para hardware analógico enxuto, os pesquisadores reduziram dramaticamente tanto o consumo de energia quanto a latência, apontando para sistemas autônomos mais seguros e responsivos, capazes de lidar com mau tempo, visibilidade obstruída e ruas movimentadas.
Por que muitos olhos são melhores do que um
Nas pistas de teste e rodovias de hoje, veículos autônomos observam o mundo usando uma mistura de câmeras, detecção por laser (LiDAR), radar em ondas milimétricas e sensores de movimento que acompanham o deslocamento do veículo. Cada um desses sensores tem forças e limitações: o LiDAR pode ser bloqueado por caminhões ou edifícios, o radar tem dificuldade com detalhes finos, e sensores de movimento tendem a derivar ao longo do tempo se usados isoladamente. Para obter uma imagem confiável do tráfego ao redor, o veículo precisa fundir essas visões imperfeitas em uma estimativa consistente sobre onde as coisas estão e como se movem. Uma ferramenta matemática chamada filtro de Kalman tornou-se um recurso essencial para fazer isso em tempo real, mas em sua forma convencional ele roda em processadores digitais que consomem energia e introduzem atrasos ao transferir repetidamente dados entre sensores analógicos e lógica digital.

Um novo tipo de bloco eletrônico
A equipe aborda esse problema usando um dispositivo construído a partir de uma única camada atômica do semicondutor dissulfeto de molibdênio (MoS2). O memtransistor combina as funções de elemento de memória e de transistor em uma única estrutura de três terminais, cuja condutância elétrica pode ser ajustada de forma contínua e então mantida mesmo quando a energia é removida. Ao controlar cuidadosamente pequenas vacâncias na rede atômica do material com campos elétricos, o dispositivo pode armazenar de forma confiável 1024 níveis distintos de condutância em uma ampla faixa, e mantê-los por mais de um ano. Igualmente importante, esses níveis variam de forma praticamente linear conforme a tensão de controle é varrida, o que permite mapear um peso matemático desejado no filtro de Kalman diretamente para uma configuração física do memtransistor.
Transformando matemática em hardware
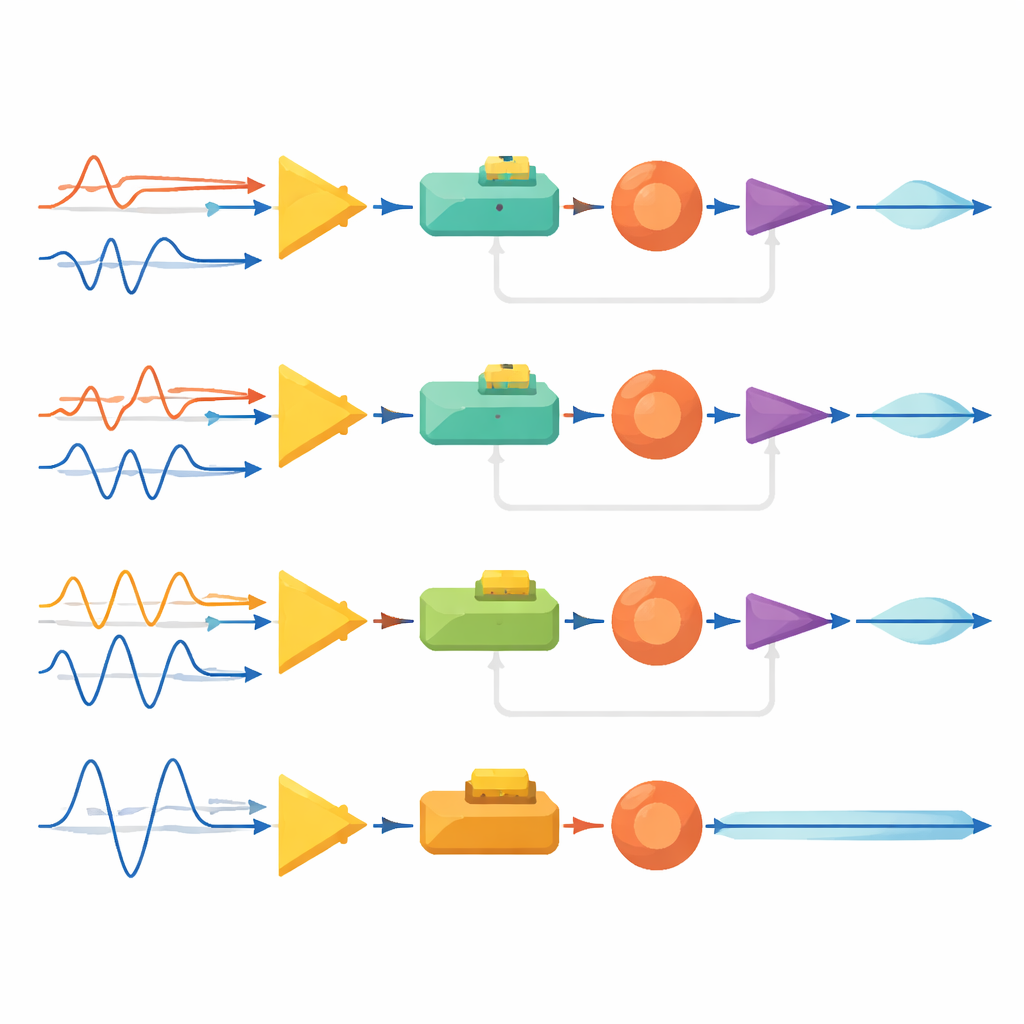
Com base nesse dispositivo, os pesquisadores projetam uma versão analógica de um filtro de Kalman em múltiplas etapas que opera diretamente nas tensões dos sensores em vez de em números digitais. O circuito consiste em três estágios em cadeia que estimam a posição, velocidade e aceleração do veículo. Dentro de cada estágio, operações básicas como subtração, integração, adição e diferenciação são realizadas por módulos analógicos compactos. O fator de “ganho” crucial que indica ao filtro quanto confiar nas novas leituras dos sensores em relação às próprias previsões é implementado usando a condutância do memtransistor. Basta ajustar a tensão de porta para que o sistema mude suavemente o quanto dá atenção ao LiDAR, ao radar ou aos sensores de movimento, sem reescrever qualquer software.
Cenários de condução e condições adversas
Para demonstrar o funcionamento na prática, a equipe implementa o filtro completo de três estágios em uma placa de circuito populada com seus dispositivos de MoS2 e componentes analógicos padrão. Eles alimentam o circuito com sinais realistas e ruidosos que imitam o que LiDAR, radar e sensores de movimento veriam durante uma manobra de mudança de faixa para ultrapassagem em uma rodovia. À medida que os sinais passam por cada estágio, as saídas ficam mais limpas, produzindo estimativas consistentes de posição, velocidade e aceleração, preservando ao mesmo tempo variações bruscas que são críticas para a segurança, como frenagens repentinas. O sistema se mostra especialmente impressionante quando um sensor se torna pouco confiável ou é bloqueado — por exemplo, quando um caminhão oculta temporariamente outro veículo do LiDAR. Ao reduzir o ganho associado ao sensor comprometido diretamente no hardware, o filtro analógico desloca automaticamente sua confiança para as entradas remanescentes e para padrões de movimento anteriores, mantendo as estimativas de velocidade e aceleração suaves e fisicamente plausíveis.
Cérebros mais rápidos e enxutos para máquinas
Em comparação com uma implementação digital padrão da mesma tarefa de filtragem, o sistema analógico baseado em memtransistor usa cerca de 13 vezes menos energia e completa seus cálculos aproximadamente 59 vezes mais rápido, enquanto processa simultaneamente três variáveis de movimento chave. Como os dispositivos são compactos, estáveis e compatíveis com fabricação em grande escala, essa abordagem aponta para futuros blocos de processamento “no-sensor” ou “próximo ao sensor” que podem ser colocados próximos a câmeras e radares em carros, drones e outras máquinas conectadas. Para não especialistas, a conclusão é que, ao deixar que a física de materiais avançados faça parte da matemática, os engenheiros podem construir “cérebros” eletrônicos mais inteligentes, rápidos e eficientes que ajudam sistemas autônomos a navegar de forma confiável mesmo quando a visão do mundo está longe de ser perfeita.
Citação: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Palavras-chave: condução autônoma, fusão de sensores, filtro de Kalman, memtransistor, computação analógica