Clear Sky Science · pt
Gestão de resíduos inteligente e eficiente por meio de deep learning sem fio habilitado por IoT
Por que a triagem de lixo de alta tecnologia importa
A maioria de nós joga o lixo numa lixeira e esquece, mas o que acontece em seguida molda nosso ambiente, nossa saúde e até os orçamentos das cidades. Ao redor do mundo, pilhas crescentes de resíduos mistos tornam a reciclagem mais difícil e os aterros mais cheios. Este artigo explora como câmeras, sensores sem fio e um tipo de inteligência artificial podem trabalhar juntos para identificar que tipo de resíduo descartamos e encaminhá‑lo automaticamente ao lugar certo, tornando a trajetória do nosso lixo muito mais inteligente e segura.
O desafio crescente do lixo do dia a dia
As cidades hoje geram bilhões de toneladas de resíduos sólidos a cada ano, e essa quantidade deve subir acentuadamente até meados do século. Em muitas regiões, trabalhadores ainda separam resíduos manualmente — uma tarefa lenta, cara e arriscada que os expõe a objetos cortantes, vapores e doenças. Ferramentas computacionais existentes tentaram ajudar, mas muitas têm dificuldade diante da aparência bagunçada e variada do lixo real. Podem presumir que os dados se comportam de maneira simples e ordenada, ou serem pesadas e lentas demais para rodar em sistemas práticos colocados em lixeiras, caminhões ou centrais de triagem.
Olhos inteligentes e máquinas conectadas
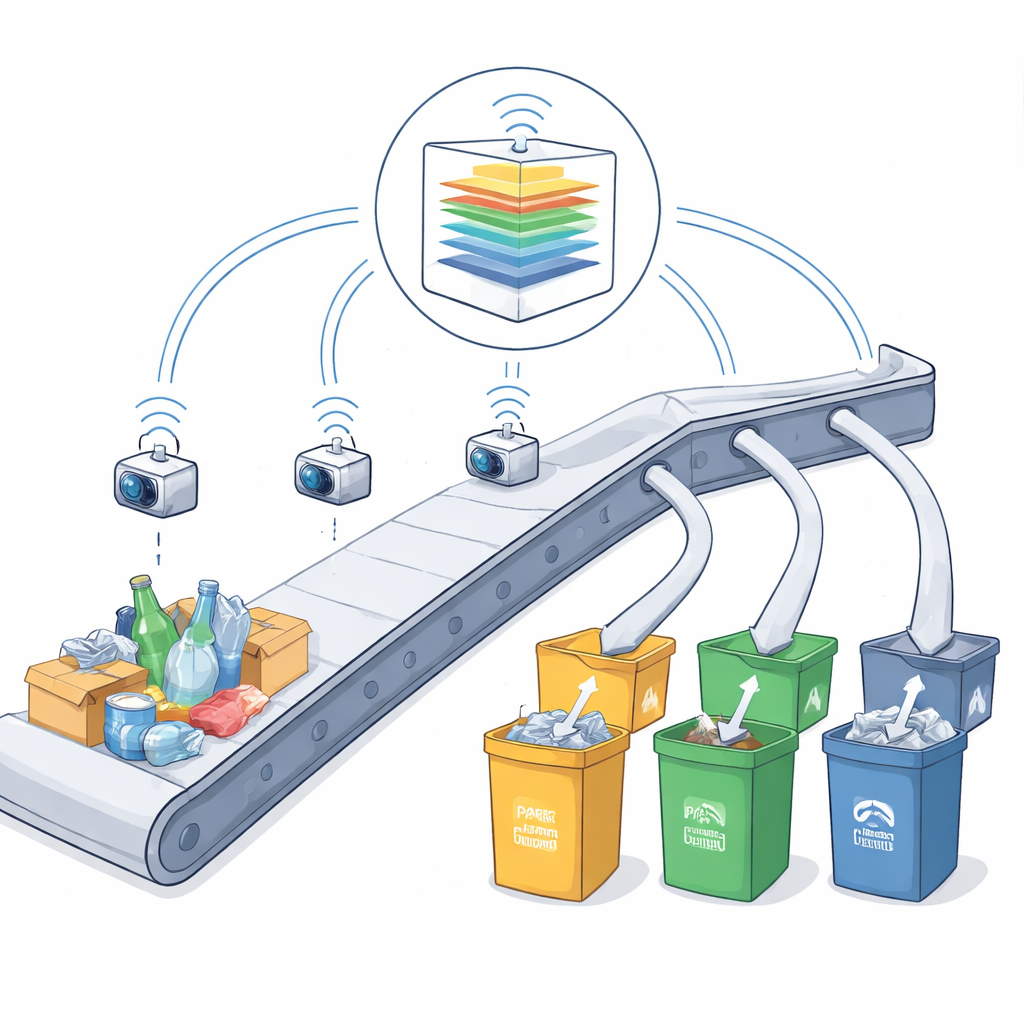
O estudo propõe um conjunto completo de triagem de resíduos que combina três ingredientes principais: câmeras em rede, um computador central e uma linha de separação mecânica. Câmeras de alta resolução colocadas próximas aos pontos de coleta capturam imagens de cada item que passa por uma esteira. Um microcontrolador próximo processa essas imagens e as envia sem fio para um computador mais potente. Lá, um modelo de reconhecimento de imagem analisa cada foto e decide se mostra papelão, vidro, metal, papel, plástico ou lixo comum. Com base nessa decisão, sinais de controle movem abas, esteiras ou braços robóticos para que cada item caia na lixeira correta, tudo em tempo real e sem manuseio humano.
Como o motor de aprendizado enxerga seu lixo
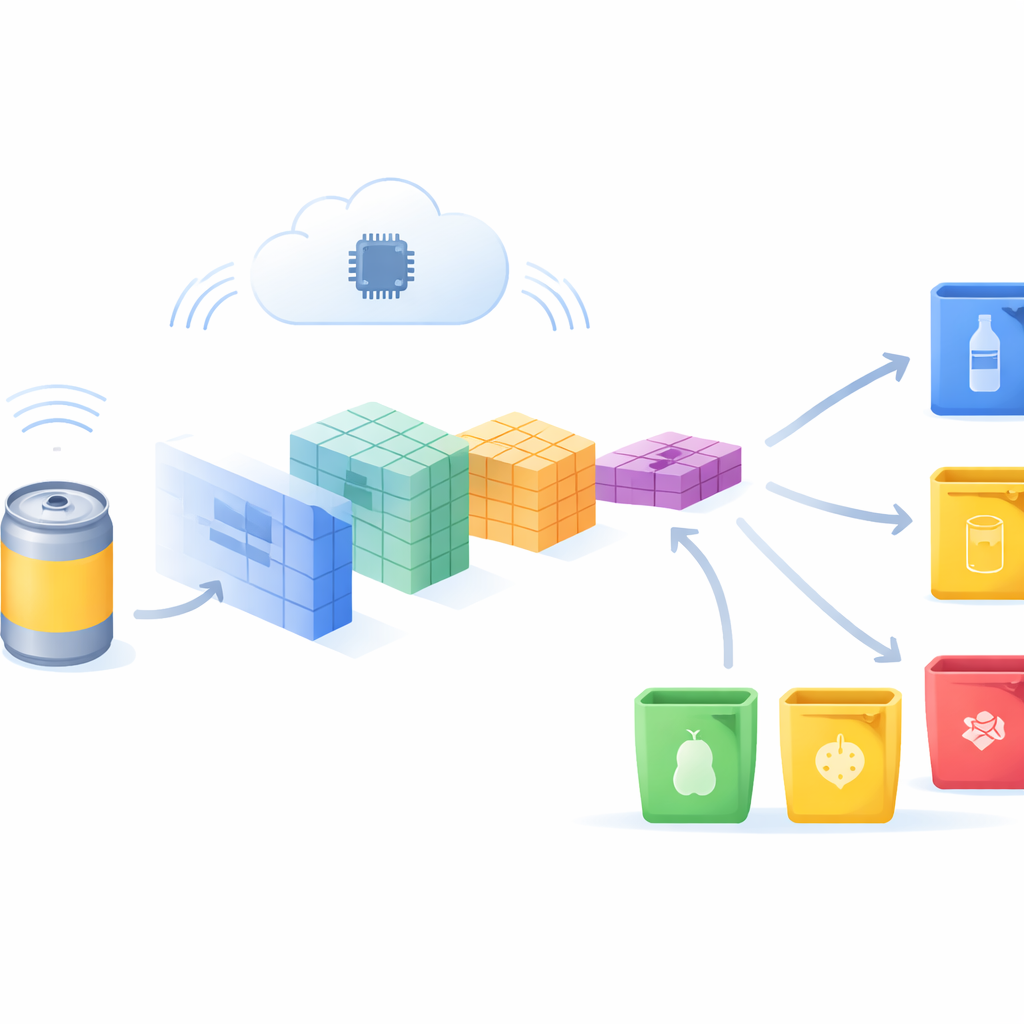
No núcleo do sistema está um motor de detecção de padrões em camadas, inspirado em como a visão funciona em animais. Camadas iniciais desse motor focam em características simples, como bordas e texturas, enquanto camadas mais profundas combinam esses elementos em formas mais complexas que correspondem a garrafas, latas e caixas. Os pesquisadores treinaram esse motor em uma coleção pública de mais de 2.400 fotos rotuladas mostrando os seis tipos de resíduo em várias formas, tamanhos e condições de iluminação. Durante o treinamento, mostraram repetidamente esses exemplos, ligeiramente alterados por rotações, zooms e espelhamentos, para que não fosse enganado por pequenas mudanças no ponto de vista. Também usaram truques de regularização que desligam aleatoriamente partes do modelo durante o treino para evitar que ele memorize o conjunto de dados e para ajudá‑lo a lidar com imagens novas e não vistas.
O que funcionou bem e o que ainda o atrapalha
Quando testado em imagens separadas, o sistema rotulou corretamente pouco mais da metade de todos os itens — modesto à primeira vista, mas um avanço claro em relação a muitas abordagens mais antigas baseadas em regras ou modelos simples. Foi particularmente eficaz em identificar itens de papelão e papel, capturando a maioria deles e raramente gerando falsos positivos. O sistema identificou metal, vidro e lixo misto de forma razoável, mas teve mais dificuldades com plástico, frequentemente confundindo itens com outros materiais brilhantes ou amassados. Uma análise mais detalhada dos padrões de erro mostrou que objetos que se assemelham ao olho humano — como latas de metal e garrafas de vidro, ou diferentes tipos de embalagens plásticas — também são difíceis de separar para o modelo usando apenas imagens coloridas padrão.
Olhando adiante para cidades mais limpas e inteligentes
Em termos simples, este trabalho mostra que uma linha de triagem baseada em câmeras e conectada sem fio, comandada por software moderno de reconhecimento de padrões, já pode assumir grande parte do trabalho sujo de separar resíduos domésticos. Embora a versão atual não seja perfeita, especialmente para plásticos complicados, ela comprova que tais sistemas podem operar continuamente, escalar para fluxos elevados de resíduos e ser ajustados a novas condições. Com dados de treinamento mais ricos, designs de modelo aprimorados e possivelmente métodos adicionais de sensoriamento, versões futuras poderiam classificar com mais precisão e confiabilidade. Isso significaria menos contaminação na reciclagem, menos perigos para os trabalhadores e um caminho mais sustentável para os sacos de lixo comuns que colocamos para fora todos os dias.
Citação: Latha, P., Benni, N.S., Asuti, M.G. et al. Smart and efficient waste management through wireless IoT-enabled deep learning. Sci Rep 16, 11118 (2026). https://doi.org/10.1038/s41598-026-43827-8
Palavras-chave: gestão inteligente de resíduos, IoT, deep learning, reciclagem automatizada, triagem de resíduos baseada em imagem