Clear Sky Science · pt
Pipeline TinyML para classificação eficiente de trincas em inspeções de integridade estrutural com UAVs
Olhos mais inteligentes no céu
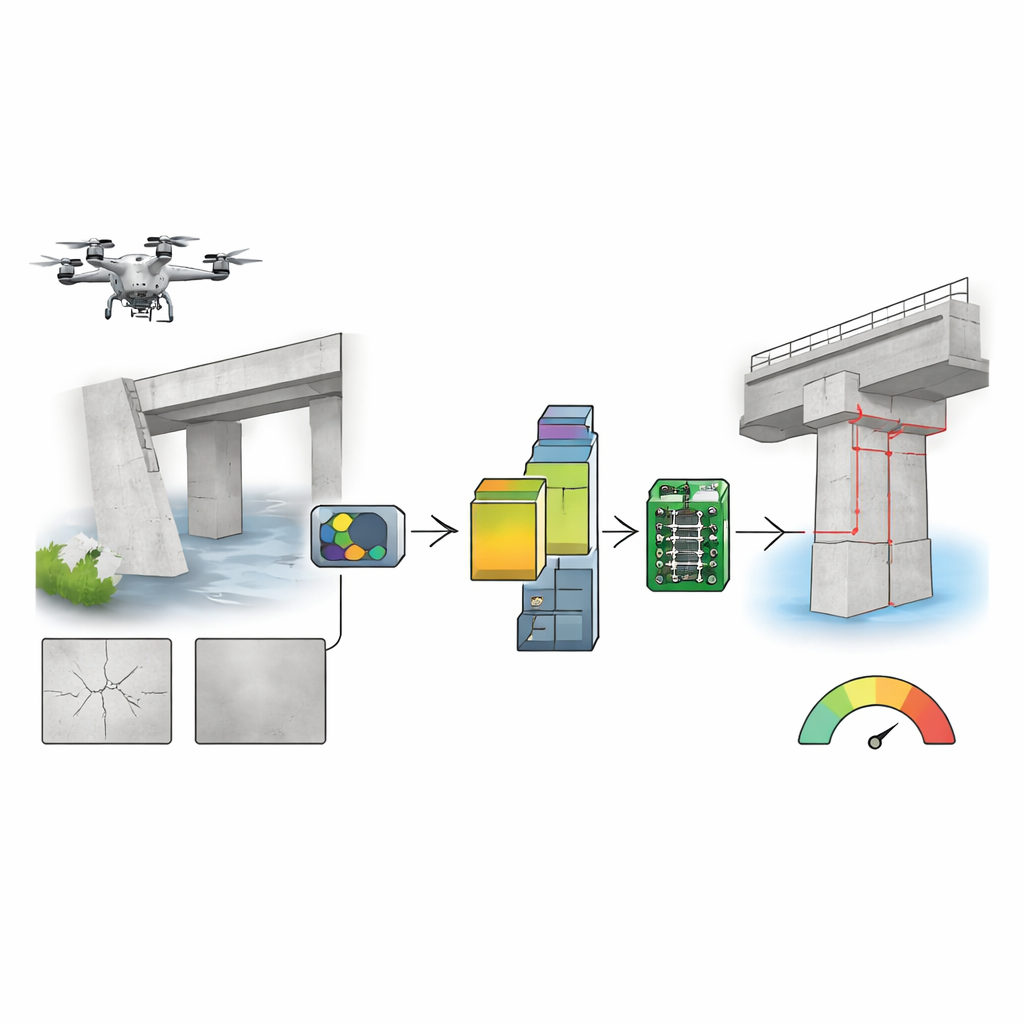
Pontes, barragens e outras estruturas críticas envelhecem como seres humanos, e pequenas trincas podem ser sinais precoces de falhas futuras. Engenheiros cada vez mais enviam pequenos drones para fotografar essas superfícies, mas hoje muitas dessas imagens precisam ser enviadas a servidores remotos para análise, consumindo bateria e levantando riscos de privacidade dos dados. Este artigo explora como reduzir o “cérebro” detector de trincas a um chip minúsculo, na escala de miliwatts, que pode ir a bordo do próprio drone, tornando as inspeções mais rápidas, seguras e muito mais eficientes.
Por que as trincas importam
Métodos tradicionais de acompanhamento da saúde de estruturas costumam depender de sensores de contato aparafusados ou colados no concreto e no aço. Esses sistemas podem ser caros de instalar e tendem a detectar problemas apenas depois que o dano já progrediu. A inspeção visual oferece uma visão mais direta, mas enviar inspetores humanos a andaimes ou faixas de tráfego é lento, arriscado e subjetivo. Veículos aéreos não tripulados (UAVs) pequenos equipados com câmeras prometem uma solução melhor: eles podem varrer rapidamente tabuleiros de pontes e paredes, capturando milhares de fotos detalhadas que revelam fissuras capilares. O desafio é o que fazer com todos esses dados quando o drone tem bateria limitada e conexões de rede frequentemente instáveis.
O problema de enviar tudo para a nuvem
A maioria dos sistemas atuais segue um padrão de “aquisição na borda–inferência na nuvem”. O drone atua apenas como uma câmera voadora, transmitindo imagens para um computador potente em outro local que executa um modelo de deep learning para decidir se cada trecho de concreto contém uma trinca. Essa abordagem faz sentido do ponto de vista computacional, mas traz desvantagens importantes. Streaming de imagens de alta qualidade drena a bateria do drone, reduzindo drasticamente o tempo de voo. Se o link sem fio cair ou enfraquecer, a missão de inspeção pode parar no momento mais crítico. E encaminhar imagens detalhadas de infraestrutura estratégica para servidores remotos levanta preocupações legítimas de privacidade e segurança. Essas tensões motivam uma abordagem diferente: colocar a inteligência diretamente no drone, em hardware pouco mais potente que um relógio digital.
Encolhendo o cérebro para caber em um chip minúsculo
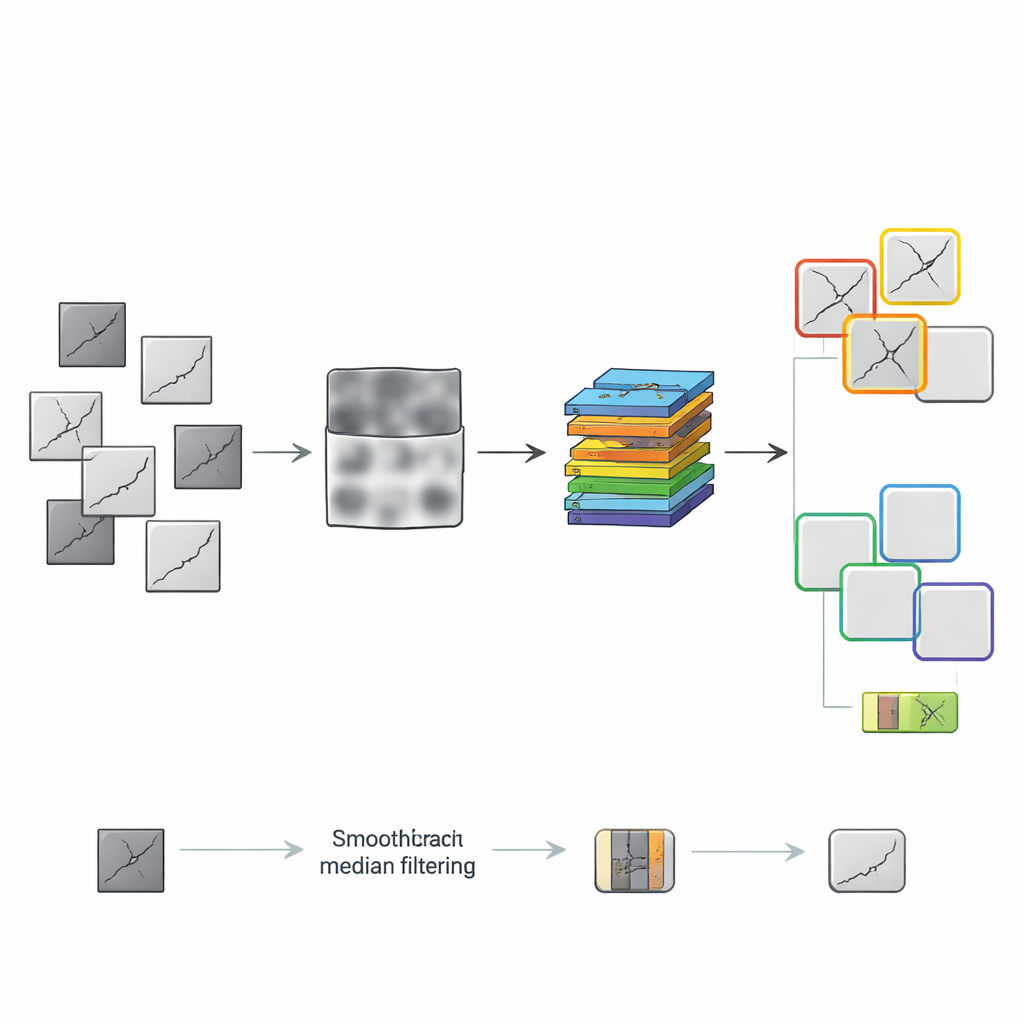
Os autores construíram um pipeline de ponta a ponta que roda em um microcontrolador de baixo consumo, o STM32H7, usando uma rede neural compacta chamada MobileNetV1x0.25. Em vez de inventar um modelo novo, eles se concentraram em tudo ao redor dele: como as imagens são pré-processadas e como o modelo é comprimido. Usaram um conjunto de dados amplamente estudado com mais de 50.000 imagens de concreto, divididas em pequenos pedaços rotulados como “trinca” ou “sem trinca”, e então treinaram e testaram diferentes maneiras de preparar esses pedaços para o modelo minúsculo. Um caminho seguiu uma sequência manual de etapas, como converter para tons de cinza, aumentar contraste, remover ruído, suavizar e, por fim, transformar as imagens em silhuetas em preto e branco. Outro caminho deixou uma estratégia de busca “gulosa” construir uma cadeia de pré-processamento passo a passo, sempre mantendo a combinação que realmente melhorava o desempenho do modelo.
Encontrando o ponto ideal no pipeline
Os testes revelaram que mais processamento nem sempre é melhor. O pipeline manual, que terminava com uma binarização agressiva, na verdade prejudicou a rede neural, removendo sombreamentos sutis de que o modelo precisava para ver trincas finas. Em contraste, a busca gulosa descobriu que um par de etapas mais simples—conversão para tons de cinza seguida de filtragem mediana para suavizar ruído—deu os melhores resultados. Além disso, a equipe explorou sistematicamente quatro maneiras de compactar o modelo: converter seus números da precisão total para inteiros de oito bits, treiná-lo enquanto ele “fingia” estar quantizado, aparar pesos menos importantes e agrupar valores de peso similares. Eles testaram essas técnicas isoladamente e em combinações, depois implantaram os modelos resultantes na placa do microcontrolador e mediram não apenas a acurácia, mas uso de memória, tempo de processamento e energia por decisão.
Computador minúsculo, grande desempenho
Uma configuração emergiu como a melhor escolha geral: entrada em tons de cinza mais filtro mediano alimentando um modelo que combina pruning com treinamento ciente de quantização em formato de oito bits. Essa configuração compacta alcançou uma pontuação F1—um equilíbrio entre capturar trincas reais e evitar falsos positivos—de 0,938, um salto de mais de 11 pontos percentuais sobre detectores de trinca anteriores rodando a bordo. Ao mesmo tempo, precisou de apenas cerca de 2,9 megabytes de memória de trabalho, 309 kilobytes de armazenamento de programa e menos de meio segundo para processar cada pedaço de imagem. Cada decisão consumiu aproximadamente 0,6 joules de energia. Quando montado em um drone DJI Mini 4 Pro, rodar continuamente esse classificador de trincas reduziria o tempo de voo em apenas cerca de 4%, comparado com aproximadamente um quarto da bateria consumida por placas de edge computing populares e muito mais pesadas.
O que isso significa para inspeções no mundo real
Para leigos, a mensagem principal é que avaliações estruturais sérias não exigem mais o envio de imagens sensíveis a centros de dados distantes nem o transporte de computadores volumosos e gastadores de energia para o céu. Ao ajustar cuidadosamente como as imagens são limpas e como a rede neural é comprimida, os autores mostram que um chip do tamanho de um polegar pode identificar trincas em concreto de forma confiável consumindo pouquíssima bateria do drone. O sistema se mantém razoavelmente robusto a desfoque por movimento e a variações de iluminação, e se comporta de forma sensata mesmo quando imagens com trincas são raras entre muitos trechos saudáveis. Juntos, esses resultados aproximam as inspeções com drones de um futuro no qual enxames de pequenos UAVs baratos podem patrulhar silenciosamente nossa infraestrutura, detectando problemas cedo com inteligência embarcada eficiente e inteligente.
Citação: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Palavras-chave: inspeção com drone, trincas em concreto, tiny machine learning, monitoramento da integridade estrutural, edge AI