Clear Sky Science · pt
Controle independente de hardware para simulação de gravidade parcial usando um dispositivo robótico de 2 GDL
Por que gravidade mais fraca na Terra importa
À medida que os humanos planejam viagens mais longas à Lua e a Marte, precisamos com urgência entender como níveis de gravidade diferentes afetarão o corpo. Realizar esses testes no espaço é caro e raro, por isso cientistas usam máquinas giratórias especiais na Terra, chamadas clinostatos, para mimetizar baixa gravidade em células e pequenos tecidos. Este artigo apresenta uma nova forma de controlar esse tipo de dispositivo para que ele possa imitar com confiabilidade não apenas a ausência de peso, mas também as forças mais fracas da Lua, de Marte e até níveis de gravidade próximos ao da Terra — sem ficar rigidamente vinculado a um motor ou peça de hardware específicos.
Girando para criar gravidade falsa
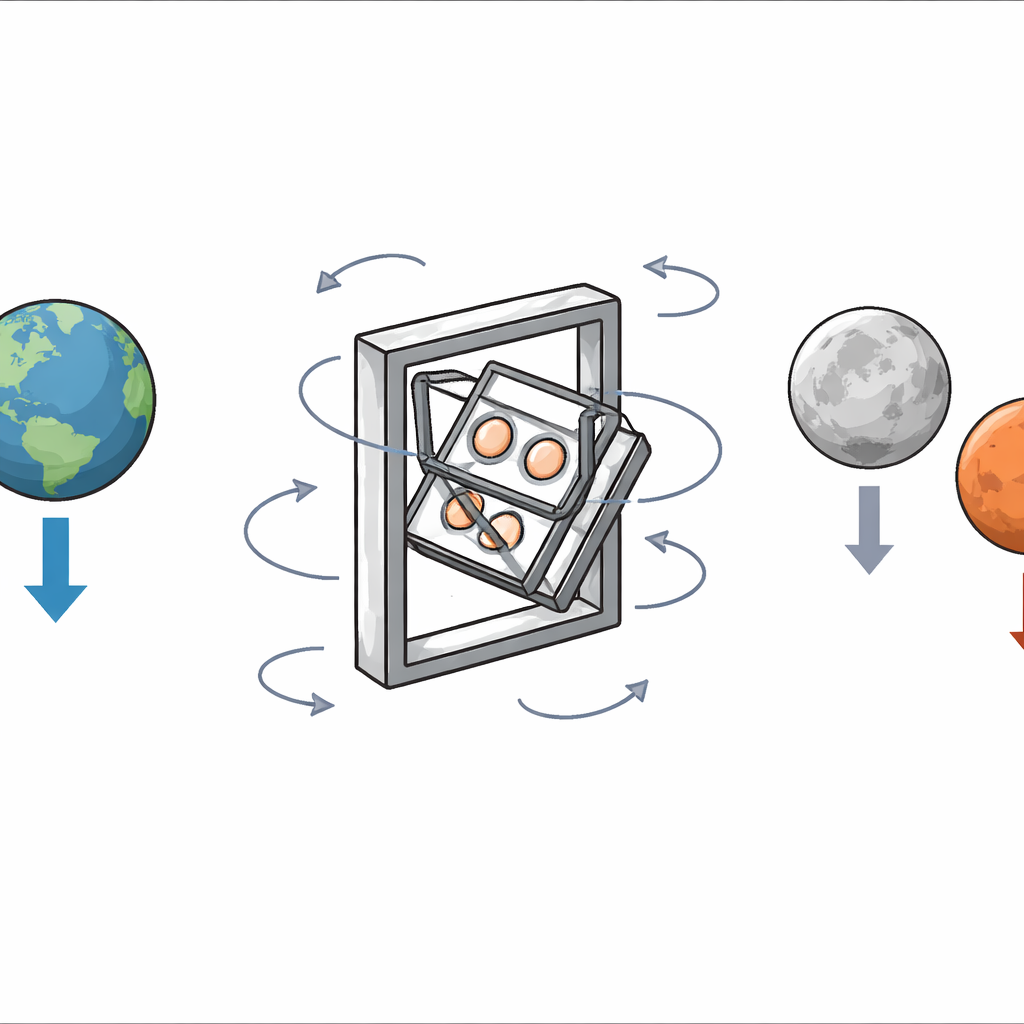
Perto da superfície da Terra, a gravidade aponta quase diretamente para baixo em todos os lugares. Um clinostato tridimensional pega uma pequena amostra — como células ou organoides em uma placa — e a gira lentamente em torno de dois eixos perpendiculares. Como a orientação da amostra continua mudando, a direção da gravidade “vista” pelas células fica em constante variação e, ao longo do tempo, essas forças se promediam. Quando as rotações são organizadas corretamente, a gravidade média no tempo pode se aproximar de zero, imitando a microgravidade em órbita. Por muitos anos essa ideia simples tem sido usada para estudar perda muscular, enfraquecimento ósseo, alterações imunes e outros efeitos semelhantes aos do espaço sem sair do solo.
Da ausência de peso à gravidade “tipo Lua”
Mais recentemente, pesquisadores perceberam que não basta estudar apenas a ausência de peso. Astronautas na Lua ou em Marte viverão com uma gravidade mais fraca, não ausente. Para preencher essa lacuna, foi introduzido o conceito de gravidade parcial simulada por média temporal: em vez de fazer a força média desaparecer, o dispositivo mantém a gravidade apontando ligeiramente mais vezes em uma direção do que em outras. Esse viés cria uma força média entre zero e a gravidade total da Terra, permitindo aos cientistas imitar condições como 0,17 g na Lua ou 0,38 g em Marte. Métodos de controle anteriores conseguiam isso, mas dependiam fortemente dos motores e da mecânica usados, e não conseguiam produzir gravidade parcial maior que cerca de 0,44 g.
Nova forma de guiar o girador
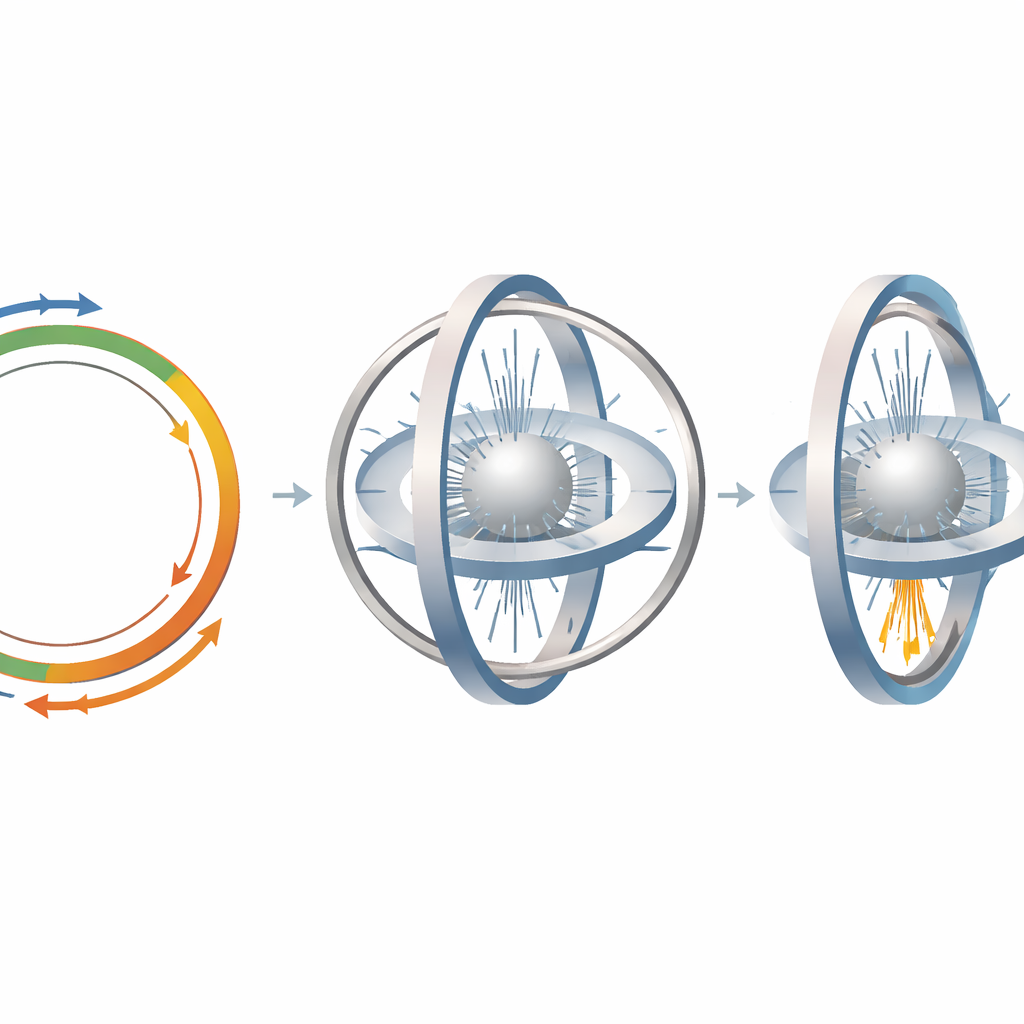
A inovação central deste estudo é controlar o motor externo do clinostato com base em seu ângulo, em vez de no tempo. Métodos anteriores prescreviam a velocidade do motor em cada instante, mas o hardware real nunca segue esse plano perfeitamente: pequenos atrasos e limites do motor causam deriva do ângulo, e esses erros se acumulam, obrigando os pesquisadores a adicionar laços de feedback extras ajustados a cada dispositivo específico. Aqui, os autores redesenham a regra de controle para que a velocidade angular seja dada diretamente como função do ângulo atual. Essa mudança aparentemente pequena reduz muito o crescimento de erro e torna o método largamente independente da potência e da inércia do motor. Ao mesmo tempo, o motor interno é acionado com um padrão semelhante ao aleatório para que a gravidade não siga sempre o mesmo caminho, melhorando a confiabilidade experimental.
Aproximando a gravidade da Terra
Usando simulações computacionais, a equipe mapeou como um parâmetro de controle chave, chamado α, afeta a gravidade média final. Ao aumentar α, eles puderam elevar a gravidade parcial simulada até cerca de 0,68 g — já muito acima do limite anterior de 0,44 g. Para ir além, introduziram um truque de “tempo de repouso”: sempre que a estrutura externa alcança o ângulo em que a gravidade se alinha com a puxada média desejada, o motor para brevemente. Durante essa pausa, a amostra sente uma tração constante nessa direção, reforçando o viés. As simulações mostraram que pausas mais longas empurram a gravidade efetiva para mais perto de 1 g terrestre, e experimentos confirmaram valores de até cerca de 0,81 g com apenas aproximadamente 1% de diferença em relação aos resultados previstos na faixa de maior precisão.
Testando Lua, Marte e além
Os pesquisadores construíram um clinostato de dois eixos acionado por servomotores comerciais e monitoraram a direção da gravidade usando um sensor inercial montado no centro. Eles testaram uma faixa de valores de α e tempos de repouso, medindo quão rapidamente a gravidade média se estabilizava e quão próximos os experimentos ficavam das simulações. Para valores moderados de α que correspondem a 0,33–0,63 g, a discrepância foi tipicamente de cerca de 1% ou menos. Simulações e experimentos para configurações tipo Lua e Marte produziram forças médias próximas de 0,17 g e 0,38 g, mantendo caminhos de gravidade variados de uma execução para outra. Os autores também exploraram limites práticos impostos pela resolução e pelos atrasos de resposta dos motores, e oferecem diretrizes simples para escolher atuadores e margens de segurança para que outros laboratórios possam reproduzir níveis precisos de gravidade parcial.
O que isso significa para a saúde espacial futura
Em termos simples, este trabalho transforma um conjunto giratório complexo e sensível ao hardware em um simulador de gravidade parcial mais plug‑and‑play. Ao vincular a velocidade do motor ao ângulo e adicionar pausas controladas, o método pode imitar fielmente uma ampla gama de níveis de gravidade, do espaço profundo à Lua e Marte e em direção à Terra, sem ajustes manuais constantes dos laços de controle. Essa flexibilidade facilita que muitos grupos de pesquisa estudem como células, tecidos e organoides respondem a níveis específicos de gravidade, ajudando a prever riscos à saúde e a projetar contramedidas para missões espaciais de longa duração.
Citação: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Palavras-chave: simulação de gravidade parcial, clinostato, biologia espacial, pesquisa em microgravidade, controle de movimento robótico