Clear Sky Science · pt
Estimativa quantitativa do kernel de desfoque a partir de sinais de trânsito usando a resposta de frequência espacial de borda inclinada como métrica de nitidez
Por que câmeras automotivas borradas importam
Carros modernos dependem cada vez mais de câmeras para detectar pedestres, ler sinais de trânsito e manter-se na faixa. Mas, assim como a visão humana, a visão da câmera pode se degradar lentamente com a idade, calor, vibração ou pequenos desalinhamentos na montagem. Este artigo explora uma nova forma de "medir" o quanto uma câmera automotiva está borrada observando sinais de trânsito cotidianos, possibilitando que fabricantes monitorem a saúde das câmeras ao longo do tempo em vez de esperar por falhas.
Transformando sinais de trânsito em gráficos de teste
Em fábricas, a nitidez da câmera é verificada em padrões de teste especiais antes do equipamento ser enviado. Na estrada, entretanto, não existe esse alvo controlado — apenas o mundo real. Os autores exploram um objeto comum e repetível nesse mundo: sinais de trânsito com bordas limpas e alto contraste. Eles se concentram em uma medida padrão de nitidez chamada resposta de frequência espacial (SFR), que basicamente indica o quanto uma câmera preserva detalhes finos na imagem. Ao analisar bordas ligeiramente inclinadas ("slanted") em sinais de trânsito, é possível calcular a SFR de maneira semelhante aos testes de laboratório, mas diretamente a partir de cenas reais de condução.

Capturando como uma lente espalha a luz
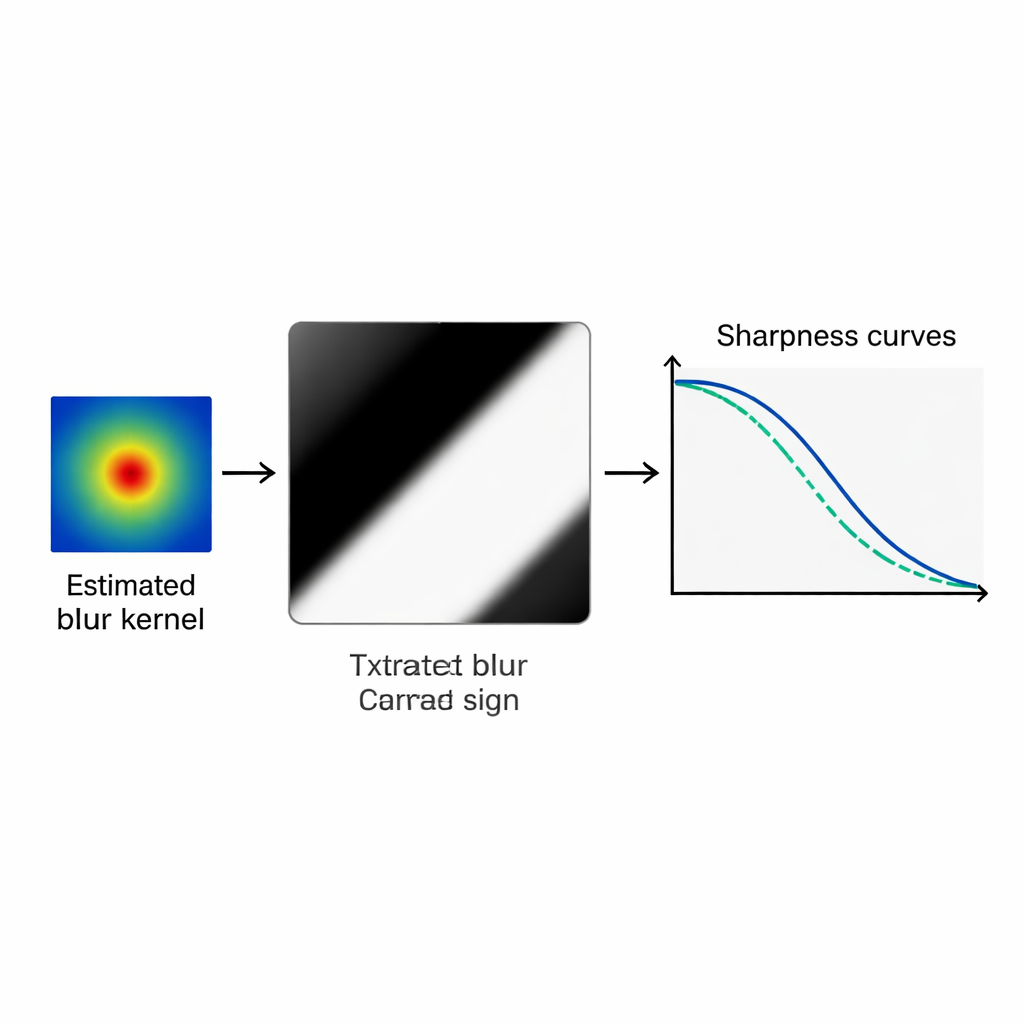
O desfoque em uma câmera pode ser descrito por uma pequena imagem chamada kernel de desfoque, ou função de espalhamento pontual. Ela mostra como a luz de um único ponto da cena se espalha pelos pixels vizinhos no sensor. Estimar esse kernel diretamente a partir de uma fotografia borrada é normalmente muito difícil, porque muitas combinações possíveis de imagem nítida e padrão de desfoque podem produzir um resultado semelhante. Para enfrentar isso, os pesquisadores primeiro usam software de projeto óptico para simular cerca de 1300 kernels de desfoque realistas para uma câmera automotiva específica, em diferentes configurações de foco e posições na imagem. Em seguida, eles comprimem essa grande coleção em um conjunto compacto de padrões-chave usando uma ferramenta estatística chamada análise de componentes principais (PCA), de modo que qualquer desfoque realista possa ser descrito por apenas algumas dezenas de números em vez de centenas de valores de pixel.
Comparando curvas de nitidez em vez de pixels
Uma vez que o "dicionário" compacto de desfoques é construído, o processo de estimação começa com dois pequenos blocos, cada um de 45 × 45 pixels, recortados de uma imagem borrada de um sinal de trânsito, junto com blocos correspondentes de uma imagem de referência nítida do mesmo sinal. Para um kernel candidato extraído do modelo PCA, os blocos nítidos são artificialmente desfocados e suas curvas de SFR são calculadas. Essas curvas são então comparadas com as curvas de SFR medidas nos blocos reais borrados. Um método de otimização global conhecido como evolução diferencial ajusta os parâmetros do kernel para minimizar a diferença entre os dois conjuntos de curvas. Na prática, o algoritmo procura o padrão de desfoque que faz com que as curvas de nitidez sintéticas se alinhem o mais próximo possível daquelas medidas na imagem real da câmera.
Quão bem o método funciona?
Os autores testam primeiro seu método em dados sintéticos, onde conhecem exatamente os kernels de desfoque verdadeiros. Em dez níveis diferentes de desfoque, desde muito nítido até visivelmente fora de foco, os kernels estimados correspondem de forma próxima à verdade de referência por várias medidas independentes de similaridade, com valores de similaridade estrutural tipicamente acima de 0,95 e erros médios muito baixos. Eles também comparam sua abordagem com técnicas recentes de "desborramento cego" de ponta da visão computacional, que são projetadas principalmente para deixar as imagens visualmente melhores em vez de recuperar exatamente a forma do desfoque. Na tarefa de reconstruir com precisão o kernel subjacente para esta câmera específica, o novo método baseado em PCA supera claramente essas referências. Finalmente, aplicam o algoritmo a imagens reais de uma câmera automotiva modificada cujo sensor pode ser deslocado em pequenos passos para induzir desfoque conhecido. Embora aqui os kernels verdadeiros não estejam disponíveis, os kernels estimados produzem bordas sintéticas cujas curvas de nitidez e aparência visual permanecem muito próximas às bordas borradas reais em uma ampla faixa de ajustes de foco.
Da técnica de laboratório ao check-up da câmera
Para não especialistas, o principal resultado é que os autores conseguem transformar sinais de trânsito comuns em uma ferramenta de diagnóstico que revela como a ótica da câmera do carro está mudando ao longo do tempo, e não apenas se uma imagem parece nítida ou suave. Em vez de um único número de aprovação/reprovação, o kernel de desfoque estimado codifica informações detalhadas sobre como a luz se espalha dentro da lente, o que por sua vez pode ser ligado a desfoco ou a imperfeições ópticas específicas. Embora o método atual seja computacionalmente pesado e funcione apenas em pequenos blocos ao redor de bordas claras, ele aponta para sistemas futuros nos quais imagens ocasionais são enviadas dos veículos para um servidor que acompanha a degradação lenta da nitidez da câmera. Isso poderia orientar manutenção preventiva, apoiar sistemas avançados de assistência ao motorista mais seguros e, em última instância, ajudar a garantir que os “olhos” digitais de veículos autônomos permaneçam em boa saúde por anos de serviço.
Citação: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Palavras-chave: câmeras automotivas, nitidez de imagem, kernel de desfoque, imagem de sinais de trânsito, monitoramento da saúde da câmera