Clear Sky Science · pt
Mapeamento semântico consciente de objetos usando funções de densidade de probabilidade para relocalização interna e planejamento de trajetórias
Por que mapas internos mais inteligentes importam
À medida que robôs domésticos e de serviço saem dos laboratórios e entram em apartamentos reais, eles precisam fazer mais do que apenas evitar paredes e móveis. Para ser realmente úteis, os robôs deveriam entender que uma cama normalmente indica um quarto, ou que uma geladeira sugere uma cozinha. Este artigo apresenta uma nova maneira de os robôs “verem” ambientes internos por meio dos objetos que definem cada cômodo, permitindo que determinem onde estão e escolham trajetórias que correspondam melhor a como as pessoas utilizam suas casas.
Vendo os cômodos através de seus objetos cotidianos
Mapas robóticos tradicionais focam seja na geometria bruta, seja em símbolos abstratos. Mapas em grade construídos a partir de varreduras a laser capturam formas detalhadas, mas ficam pesados para armazenar e lentos para buscar, além de empurrarem robôs para trajetórias rígidas em malha. Grafos de alto nível de cômodos e portas são mais fáceis de manipular, mas descartam os detalhes finos necessários para uma navegação precisa. Os autores fazem a ponte entre esses extremos organizando mapas em torno de cômodos e dos principais objetos estáticos dentro deles — camas, sofás, geladeiras, mesas e similares. Cada cômodo é delineado em uma planta baixa, e cada classe importante de objeto recebe sua própria camada, de modo que diferentes tipos de mobiliário nunca se sobrescrevem.
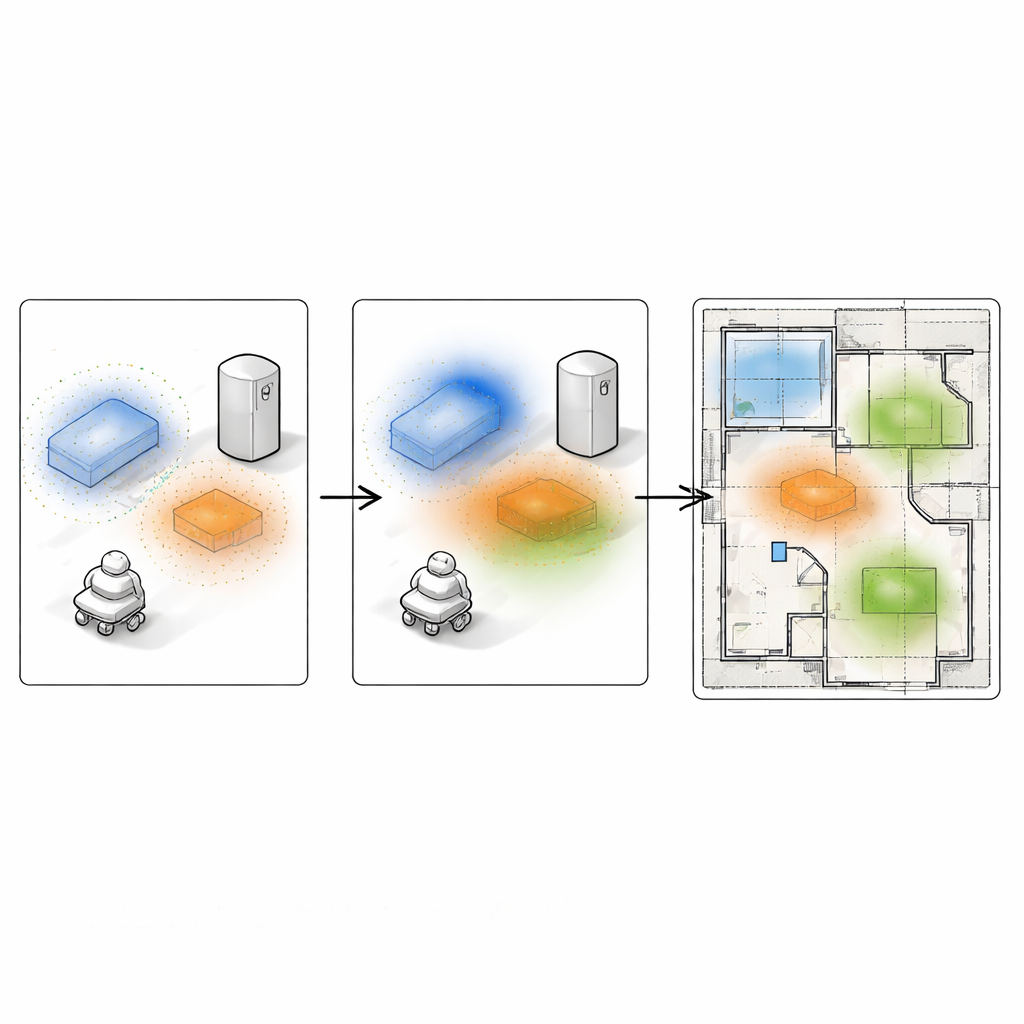
Transformando móveis em nuvens de probabilidade suaves
Em vez de desenhar cada objeto como uma caixa de arestas duras, o método converte varreduras 3D do mobiliário em “mapas de calor” suaves no chão. O robô primeiro reconstrói cada cômodo em 3D usando uma câmera RGB‑D e ferramentas padrão, depois rotula semanticamente pontos pertencentes a objetos como paredes, camas ou cadeiras. Para cada tipo de objeto dentro de um cômodo, encontram-se aglomerados de pontos que são projetados no piso. A partir desses aglomerados, o sistema estima uma densidade de probabilidade contínua — uma mancha suave que é máxima onde o objeto provavelmente está e decai gradualmente para fora. Empilhar essas manchas por tipo de objeto gera um mapa compacto em camadas que preserva tanto o significado dos objetos quanto sua forma aproximada, enquanto lida naturalmente com ruído e vistas parciais.
Permitindo que robôs redescubram onde estão
Um uso importante desse mapa centrado em objetos é ajudar o robô a relocalizar-se quando não faz ideia de onde está na planta — um problema comum quando o robô desperta ou foi movido. O robô faz uma nova observação com sua câmera de profundidade, detecta os objetos visíveis e constrói seu próprio conjunto pequeno de manchas de probabilidade para essa cena parcial. Em seguida, um algoritmo de busca evolutiva explora muitas poses robóticas possíveis ao longo do mapa do prédio. Para cada pose candidata, as manchas locais são sobrepostas ao mapa global e sua similaridade é medida usando uma distância estatística. Limites de cômodo e checagens de linha de visão descartam poses impossíveis, como ver uma geladeira através de uma parede. Ao longo de muitas gerações, a população de poses candidatas evolui em direção à localização onde os objetos observados melhor se ajustam aos campos de probabilidade armazenados, produzindo uma estimativa robusta da posição e orientação do robô.
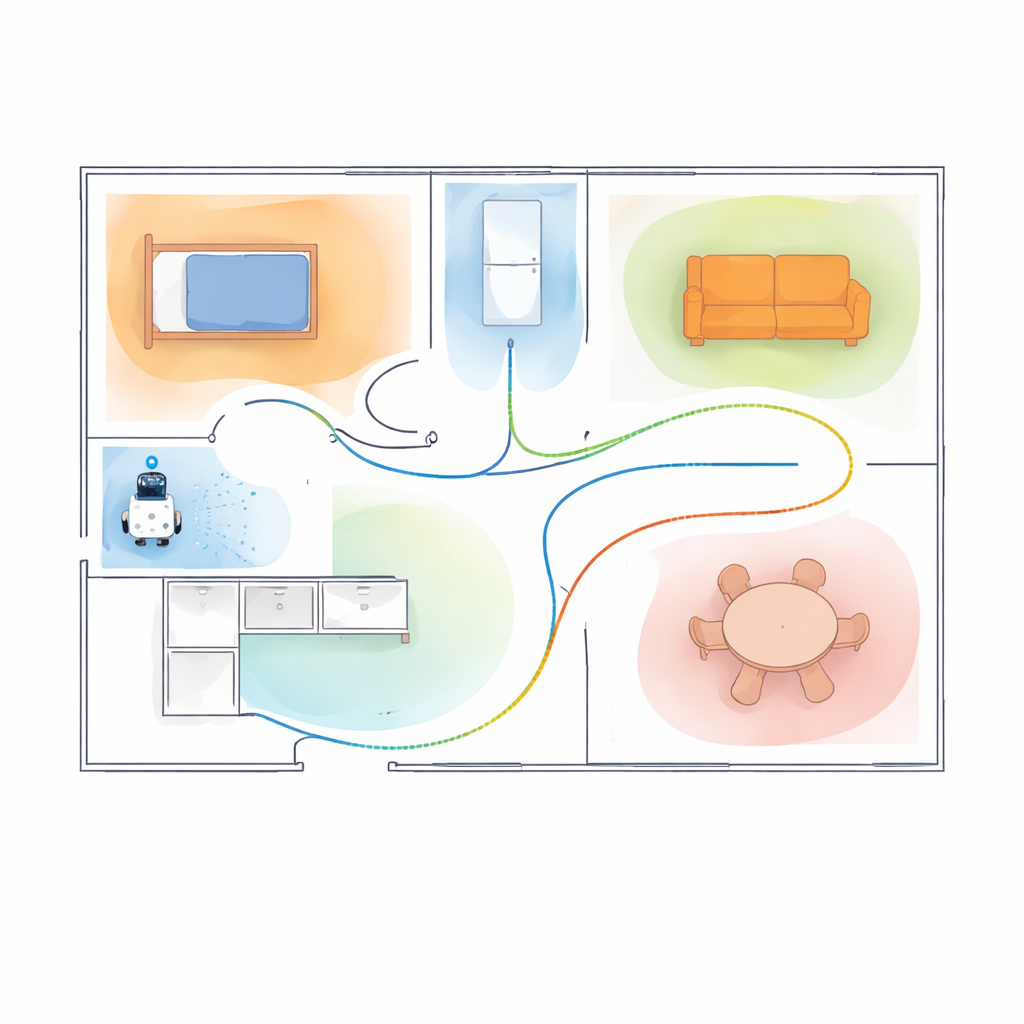
Planejando trajetórias que respeitam como as pessoas usam os espaços
O mesmo mapa também orienta como o robô se move. Como cada tipo de objeto é representado como um campo de influência suave, pode-se instruir o robô a favorecer ou evitar certas áreas ajustando pesos numéricos. Camas podem se tornar regiões a serem evitadas à noite, enquanto mesas podem atuar como atratores ao procurar por itens. Essas preferências semânticas são combinadas com um mapa de obstáculos padrão e uma margem de segurança ao redor das paredes para formar uma única superfície de custo sobre a planta. Um planejador de trajetórias clássico então encontra rotas que não apenas evitam colisões, mas também seguem os vieses sociais ou relacionados à tarefa desejados. Experimentos em um conjunto de dados realista e em um apartamento mobiliado mostram que essas trajetórias com viés semântico seguem melhor as preferências pretendidas, às vezes com pequenos aumentos no comprimento do trajeto, e podem ser mais suaves em lares reais.
O que isso significa para robôs do dia a dia
Em termos simples, este trabalho ensina robôs a pensar nas casas como as pessoas: como cômodos definidos pelo mobiliário, não apenas como caixas vazias com paredes. Ao envolver cada objeto-chave em uma nuvem de probabilidade suave, um único mapa compacto pode suportar tanto “Onde estou?” quanto “Como devo chegar lá?” sem necessitar de modelos separados específicos para cada tarefa. Testes mostram que essa abordagem ajuda robôs a se localizarem com mais confiabilidade em cômodos bagunçados ou parecidos entre si e a escolher rotas que correspondem melhor às expectativas humanas. À medida que essas ideias amadurecem, robôs domésticos futuros poderão navegar de forma mais educada e inteligente, movendo-se por nossos espaços com uma percepção muito menos mecânica.
Citação: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Palavras-chave: localização de robôs em ambientes internos, mapeamento semântico, navegação consciente de objetos, mapas robóticos probabilísticos, planejamento de trajetórias