Clear Sky Science · pt
Traversabilidade probabilística profunda com adaptação em tempo de teste para navegação de rovers planetários ciente da incerteza
Por que dirigir o rover com mais segurança importa
Quando enviamos robôs com rodas à Lua ou a Marte, eles precisam atravessar areia, pedras e inclinações sem ajuda humana. Um único palpite errado sobre a maciez do solo pode deixar um rover de bilhões de dólares preso para sempre, como ocorreu quando o Opportunity da NASA ficou aprisionado em areia ondulada por semanas. Este estudo introduz uma nova maneira de os rovers "sentirem" quão arriscado é o terreno à frente, tomarem decisões de rota mais seguras e até aprenderem com seus erros enquanto dirigem.
Solo macio como um perigo oculto
Em outros mundos, os obstáculos mais perigosos nem sempre são rochas ou penhascos, que as câmeras detectam facilmente, mas manchas aparentemente lisas de solo solto. Quando as rodas do rover giram nesse tipo de terreno, o veículo derrapa, avança muito mais lentamente do que o comando, desperdiça energia e pode ficar permanentemente imobilizado. Sistemas de navegação tradicionais focam principalmente em perigos geométricos visíveis — o que parece um obstáculo e o que não parece — sem capturar totalmente como o solo vai se comportar sob as rodas. Ao mesmo tempo, métodos de aprendizado de máquina que tentam prever o deslizamento das rodas a partir de imagens e mapas 3D podem falhar em condições desconhecidas, como iluminação diferente ou encostas mais íngremes, e geralmente não indicam quanta incerteza há em suas previsões.
Ensinar um rover a raciocinar sobre risco
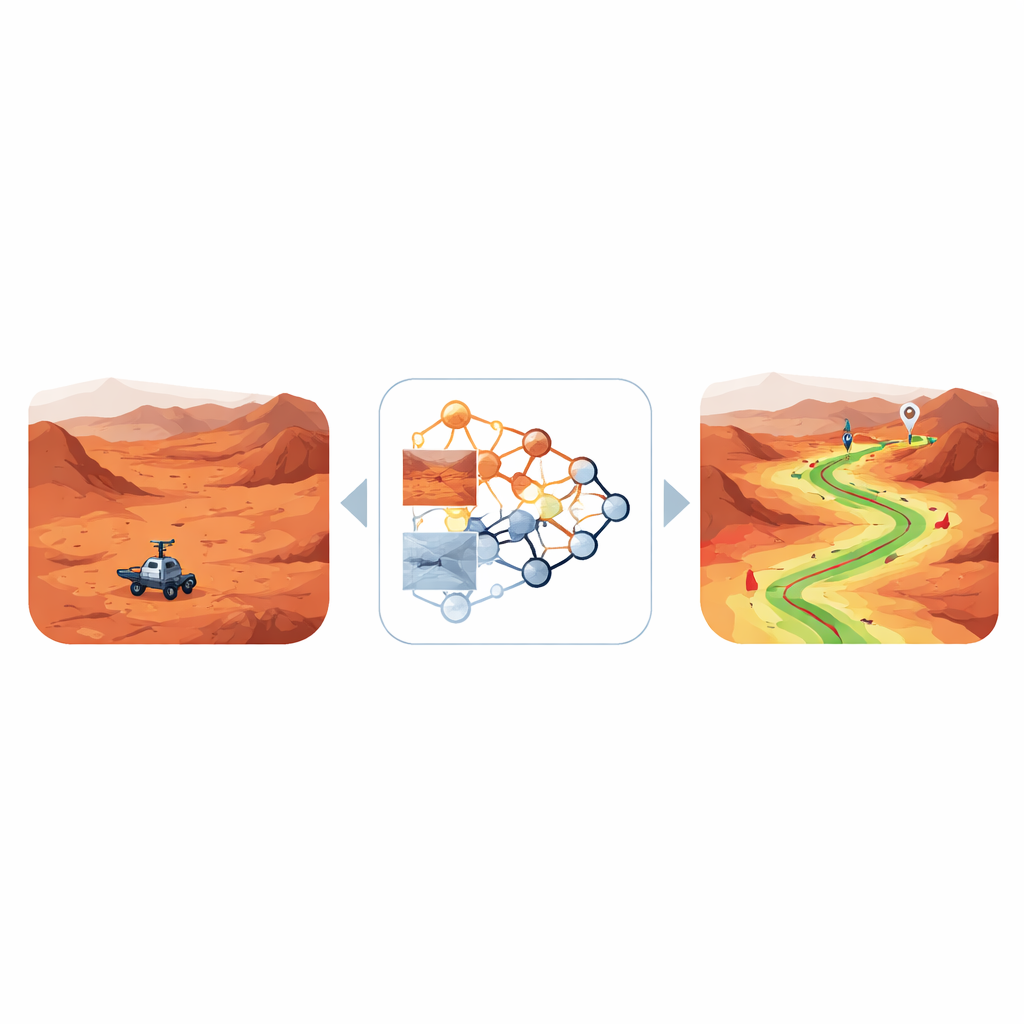
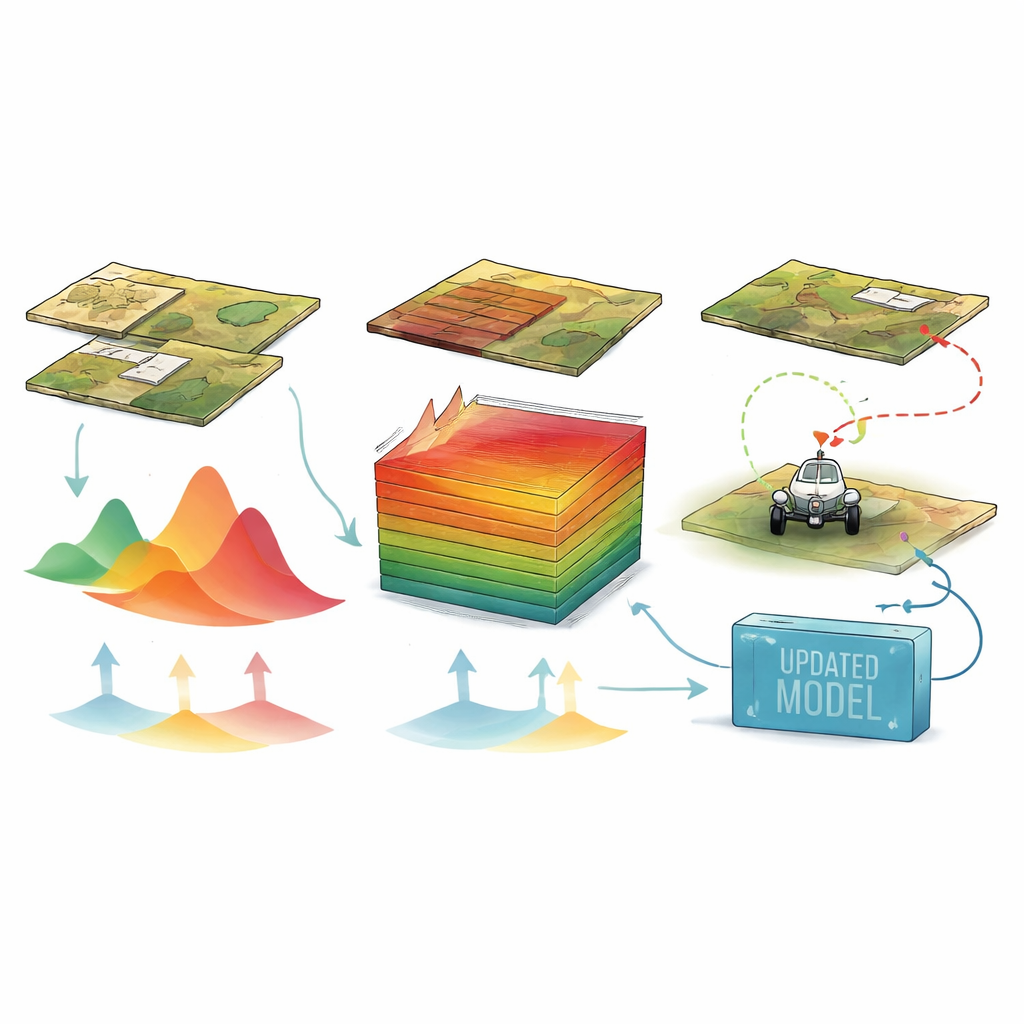
Os autores propõem uma estrutura integrada de aprendizado e planejamento que chamam de traversabilidade probabilística profunda. Em vez de produzir um único "melhor palpite" sobre quanto as rodas vão patinar em cada parte do terreno, seu modelo prevê uma distribuição de probabilidade completa dos possíveis deslizamentos, com base em imagens coloridas e na inclinação local. Um conjunto (ensemble) de redes neurais profundas observa a paisagem de cima e, para cada movimento possível numa grade, fornece tanto um valor de deslizamento esperado quanto sua incerteza. A partir dessa distribuição, o sistema traduz o deslizamento em uma velocidade de condução efetiva e, em última instância, em um custo de tempo de viagem para cada passo. Áreas onde o rover provavelmente vai atolar recebem custos muito altos; áreas onde a previsão é favorável e confiante recebem custos baixos. Um algoritmo padrão de busca de caminho então encontra uma rota que equilibra distância curta e baixo risco de imobilização.
Permitir que o rover aprenda enquanto avança
Um desafio importante na exploração planetária é que as condições que um rover encontra ao chegar podem diferir significativamente dos dados de treinamento: as encostas podem ser mais íngremes, as propriedades do solo desconhecidas ou a iluminação muito diferente. Para lidar com isso, a estrutura inclui um mecanismo de adaptação em tempo de teste. À medida que o rover dirige, mede o deslizamento real que experimenta. Após cada pequeno movimento, essas medições frescas são usadas para ajustar suavemente camadas adicionadas de "escala e deslocamento" nas redes neurais enquanto os pesos originais permanecem fixos. Essa estratégia permite que o modelo se adapte rapidamente a novos terrenos usando apenas um punhado de observações, preservando o que já aprendeu sobre condições previamente vistas. As previsões atualizadas então alimentam o replanejamento, de modo que o caminho escolhido pode melhorar em tempo real.
Submetendo o sistema a testes rigorosos
Como dados reais de rovers cobrem apenas tipos limitados de terreno, a equipe construiu um grande conjunto de dados sintéticos de paisagens semelhantes às marcianas. Eles combinaram topografia áspera gerada por computador com dez classes de terreno ocultas, cada uma com sua própria cor e comportamento de deslizamento, e variaram tanto a inclinação quanto a direção da iluminação para criar cenários familiares e não familiares. Em milhares de missões simuladas, o novo método foi comparado com dois planejadores de ponta que ou ignoram a incerteza ou a usam de forma menos direta. Em condições familiares, todas as abordagens tiveram desempenho semelhante. Mas nos casos mais desafiadores — iluminação fraca e terreno íngreme tipo cratera — a abordagem de traversabilidade probabilística profunda alcançou taxas de sucesso maiores e menor deslizamento máximo, mantendo tempos de viagem competitivos. Quando a adaptação em tempo real foi ativada, o sistema reduziu ainda mais os erros de previsão e melhorou a segurança, especialmente em ambientes que diferiam fortemente do treinamento.
O que isso significa para missões futuras
Para um leitor geral, a mensagem principal é que este trabalho dá aos rovers planetários uma maneira mais cautelosa e autoconsciente de dirigir em terrenos traiçoeiros. Em vez de confiar cegamente em uma única previsão sobre como suas rodas vão aderir, os rovers agora podem ponderar tanto o comportamento esperado quanto a incerteza, escolhendo rotas que sejam rápidas, mas improváveis de deixá‑los presos. Ao aprender continuamente com sua própria experiência de deslizamento, eles podem se ajustar a areias, inclinações e iluminações novas sem necessidade de resgate humano. À medida que agências espaciais planejam missões de superfície mais longas e ambiciosas, essa navegação ciente da incerteza pode ajudar a garantir que robôs valiosos passem mais tempo explorando novos alvos científicos e menos tempo se desatolando.
Citação: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Palavras-chave: navegação de rover planetário, traversabilidade do terreno, planejamento ciente da incerteza, aprendizado de máquina em robótica, exploração autônoma