Clear Sky Science · pt
InFoRM: um modelo inverso e direto unificado para o controle sensório-motor
Como o cérebro pode simplificar o movimento
Cada vez que você alcança um copo ou digita no teclado, seu cérebro precisa transformar uma intenção ("mover minha mão até ali") em atividade muscular precisa ao mesmo tempo em que prevê como esse movimento vai ser sentido. Teorias clássicas assumem que o cérebro usa dois calculadores internos separados para essa tarefa: um para gerar os comandos aos músculos e outro para prever as sensações resultantes. Este estudo explora uma alternativa ousada: que um único circuito unificado poderia lidar com ambos os lados do problema—economizando energia e melhorando o desempenho.
Duas maneiras de pensar o controle
Modelos tradicionais de controle do movimento imaginam um sistema dividido. Uma parte "inversa" converte um resultado desejado (por exemplo, a trajetória da ponta do dedo pelo espaço) nas ativações musculares necessárias, enquanto uma parte "direta" prevê como o corpo irá se mover e qual feedback sensorial resultará. Essas duas peças costumam ser representadas como caixas distintas nos livros didáticos. No entanto, dados de neuroimagem e de lesões não sustentam claramente uma separação tão limpa, e algumas regiões cerebrais parecem participar de ambos os papéis. Além disso, manter dois circuitos complexos funcionando pode ser metabolicamente custoso. Os autores, portanto, investigam se uma única rede flexível poderia aprender a produzir comandos motores, prever o feedback sensorial e até inferir o objetivo original a partir dos sinais internos sozinha.
Uma única rede que faz tudo
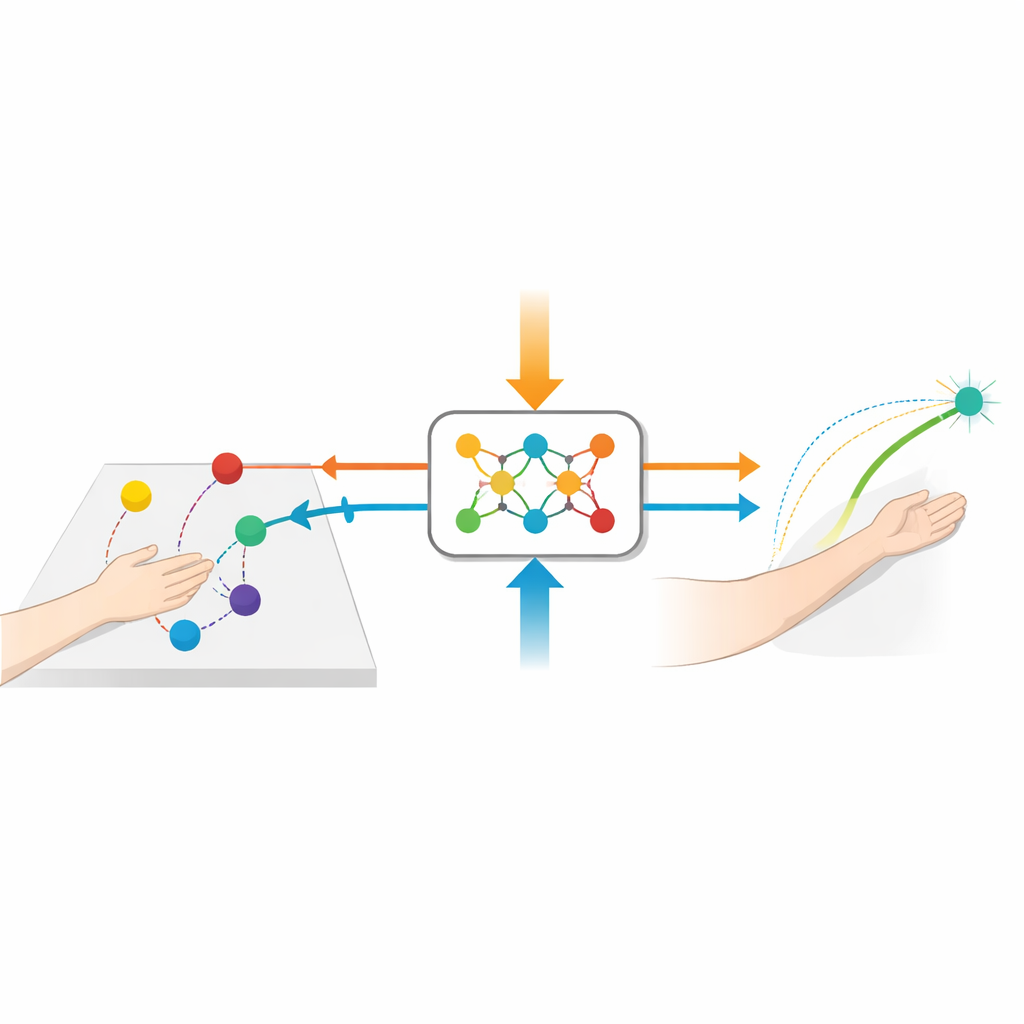
Para testar essa ideia, os pesquisadores construíram um modelo computacional chamado InFoRM (abreviação de inverse–forward–recognition model). Em vez de dois módulos empilhados, o InFoRM usa uma única rede neural recorrente—uma teia de unidades interconectadas—na qual sinais de objetivo, musculares e sensoriais fluem juntos. A partir desse "reservatório" comum de atividade, três saídas são treinadas em paralelo: uma reconstrói a trajetória desejada da mão, outra gera as ativações musculares necessárias para alcançá-la, e uma terceira prevê os sinais sensoriais (comprimento e velocidade muscular) que se seguiriam. Crucialmente, a mesma dinâmica interna sustenta as três tarefas ao mesmo tempo, de modo que o modelo pode compartilhar informação entre elas em vez de aprender cada uma isoladamente.
Levando o modelo a um teste no mundo real
A equipe registrou movimentos reais de braço de voluntários que alcançavam ritmicamente de um ponto central para alvos dispostos em diferentes direções e distâncias sobre uma mesa. Dados de captura de movimento e um modelo musculoesquelético detalhado forneceram, para cada movimento, a trajetória da ponta do dedo, as ativações musculares estimadas e os sinais análogos a sensoriais correspondentes dos músculos. O InFoRM foi treinado em um subconjunto de direções e então testado em vários cenários desafiadores: repetir movimentos aprendidos, produzir movimentos em novas direções intermediárias ("morfando" entre o que havia visto) e lidar com transições naturais e autoescolhidas entre alvos. Para comparação, os autores também construíram arquiteturas de controle mais clássicas com redes inversa e direta separadas, além de variantes aprimoradas que recebiam informações de entrada extras.

Previsões mais precisas com menos recursos
Em todos os testes, a rede unificada InFoRM reproduziu os movimentos registrados e os sinais musculares com maior precisão do que qualquer uma das arquiteturas separadas. Suas saídas acompanharam os sinais verdadeiros de forma mais fiel e com erros menores, mesmo quando solicitada a interpolar para direções não treinadas ou lidar com sequências realistas e não roteirizadas de alvos. Importante, o InFoRM alcançou essa maior precisão usando um número comparável ou menor de neurônios e necessitando de muito menos iterações de treinamento, o que sugere melhor eficiência computacional. O fato de também ter superado o melhor modelo de controle aumentado—aquele que tinha acesso à mesma combinação de informações de objetivo, motoras e sensoriais—indica que a vantagem vem da integração de tudo em um único circuito recorrente, e não apenas de entradas mais ricas.
O que isso significa para entender o cérebro
Os resultados sustentam a ideia de que o cérebro pode não manter motores "diretos" e "inversos" nitidamente separados para o movimento. Em vez disso, um único circuito ricamente conectado poderia conter ambos de forma implícita, com comandos motores e previsões emergindo da mesma dinâmica subjacente. Essa perspectiva se alinha bem com visões modernas do cérebro como uma máquina preditiva, constantemente gerando e atualizando expectativas sobre o próprio corpo e o mundo. Embora o modelo ainda seja uma abstração simplificada e detalhes biológicos como atrasos nervosos e alterações sinápticas remain to be explored, o InFoRM mostra que um desenho unificado pode ser ao mesmo tempo potente e econômico, oferecendo um roteiro alternativo convincente para como nosso sistema nervoso poderia controlar o movimento.
Citação: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Palavras-chave: controle sensório-motor, modelos internos, redes neurais, aprendizado motor, processamento preditivo