Clear Sky Science · pt
Melhorando a extração de estradas em sensoriamento remoto via DS-Unet com atenção complementar e gradientes substitutos
Mapas mais nítidos do espaço
Mapas digitais modernos dependem fortemente de fotos de satélite e aéreas, mas traçar automaticamente estradas nessas imagens é surpreendentemente difícil. Sombras, árvores, trilhas de terra e variações sazonais podem confundir programas de computador, levando a trechos quebrados ou estradas falsas no mapa. Este artigo apresenta um novo método de análise de imagem, chamado DS-Unet, que busca desenhar redes viárias mais limpas e completas a partir de imagens de sensoriamento remoto, tornando mapas futuros mais confiáveis para navegação, planejamento e resposta a desastres.
Por que encontrar estradas é tão complicado
Do alto, estradas do mundo real serpenteiam por cidades, fazendas e indústrias, muitas vezes ocultas por edifícios, vegetação e iluminação variável. Sistemas tradicionais de deep learning, que já alimentam muitos serviços de mapeamento, analisam as imagens em partes. Eles são bons em identificar padrões locais, como uma faixa de asfalto, mas têm dificuldade em entender como partes distantes se conectam em uma via contínua. Como resultado, podem perder ruas estreitas em vilarejos densos, fragmentar rodovias longas ou confundir elementos visualmente similares, como trilhas de terra ou marcações de estacionamentos, com estradas reais.
Uma nova forma de combinar o que a rede enxerga
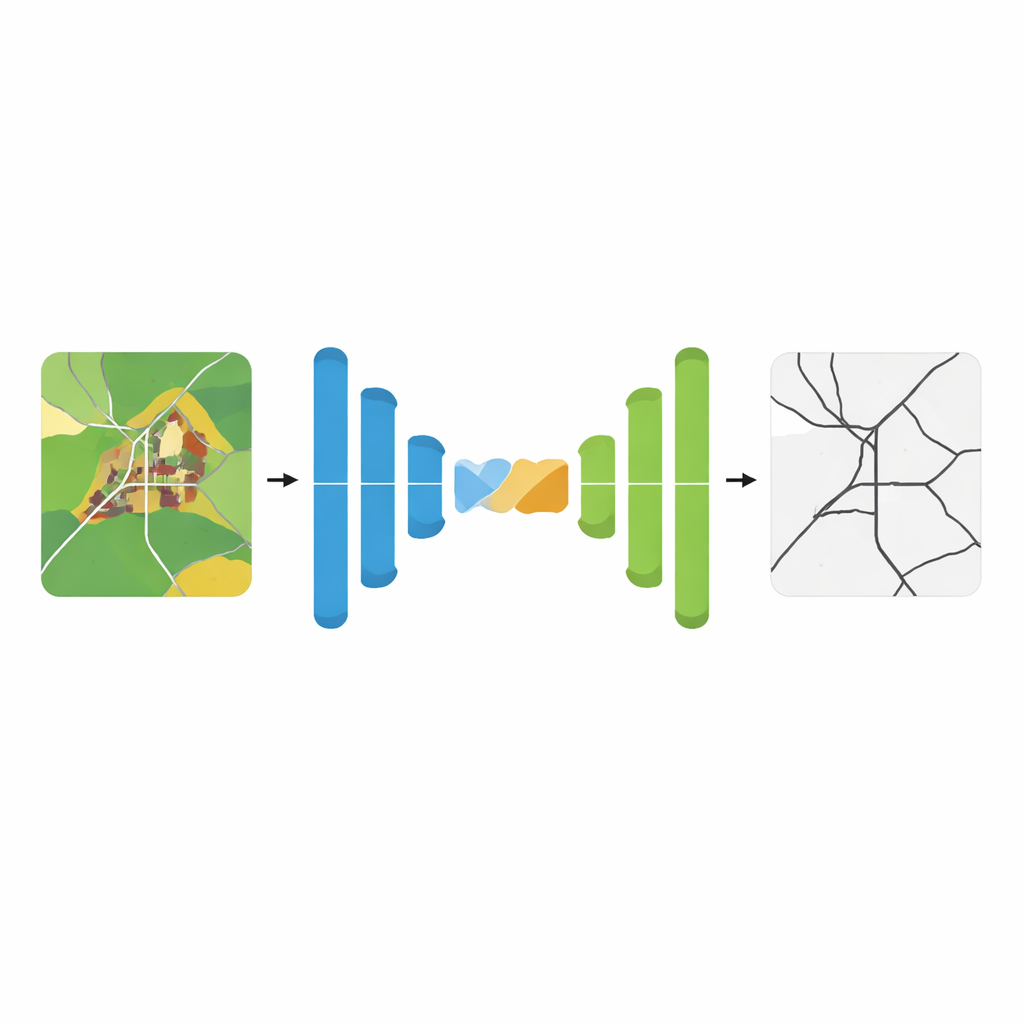
O DS-Unet se baseia em um projeto de rede neural popular que processa uma imagem por um caminho de contração (que resume detalhes) e um caminho de expansão (que reconstrói uma previsão em resolução total). Projetos clássicos conectam esses caminhos com atalhos simples que transmitem detalhes visuais iniciais. Os autores argumentam que esses atalhos misturam informação de maneira bruta, frequentemente combinando bordas úteis de estradas com padrões de fundo distrativos. O DS-Unet os substitui por um conector mais sofisticado, o Módulo de Fusão por Atenção Complementar, que procura realçar os detalhes certos enquanto também mantém a visão geral da cena.
Permitir que a rede foque e tenha visão ampla
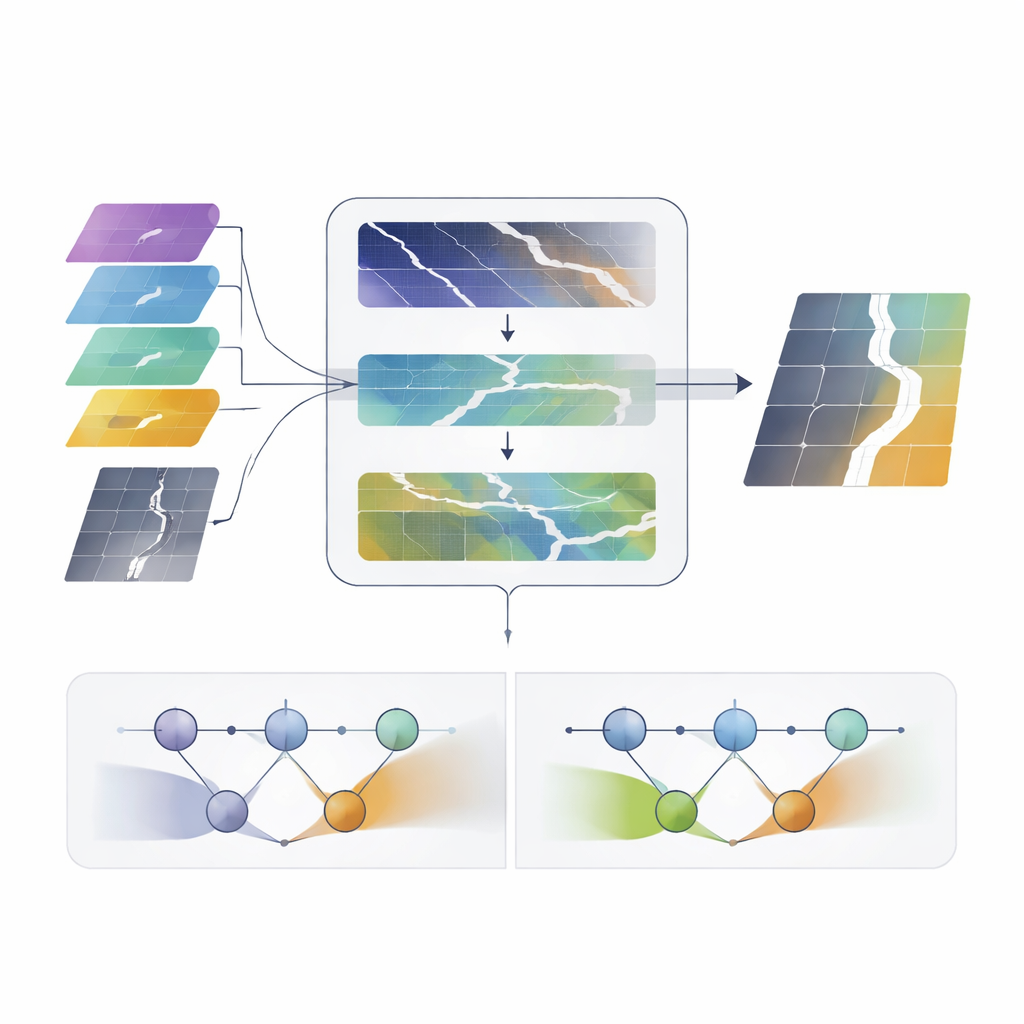
O novo módulo de fusão funciona em duas etapas que se complementam. Primeiro, uma etapa “discriminativa” foca no que faz as estradas se destacarem do entorno. Ela efetivamente subtrai padrões amplos de baixo detalhe dos mapas de características, atuando como um filtro passa-alta que afina limites e texturas de estrada enquanto suprime ruídos como campos ou telhados. Em seguida, uma etapa de “contexto global” reúne informações de toda a imagem para que segmentos distantes de estrada possam ser tratados como parte de uma única via. Ao combinar essas duas visões, o modelo é melhor em preservar ruas estreitas tipo grade em vilarejos e manter laços e curvas contínuas em zonas industriais.
Manter o processo de aprendizado vivo
Redes profundas aprendem ajustando muitos “neurônios” internos, mas uma regra de ativação comum, conhecida por sua simplicidade e velocidade, pode fazer com que alguns neurônios parem de atualizar por completo. Quando muitos ficam inativos, o treinamento torna-se instável e as previsões finais perdem detalhes finos. Para evitar isso, os autores adotam uma técnica que chamam SUGAR, que mantém a regra simples para cálculos de avanço, mas usa um gradiente artificial mais suave nos bastidores quando o modelo se atualiza. Esse artifício mantém os sinais de gradiente fluindo mesmo quando as entradas são fracas, fazendo com que mais neurônios permaneçam ativos e possam contribuir para aprender padrões sutis de estrada.
Comprovando que funciona no mundo real
Para testar o DS-Unet, a equipe usou duas coleções bem conhecidas de imagens de estradas por satélite de diferentes regiões e paisagens. Cortaram as imagens grandes em blocos manejáveis, aplicaram variações realistas de brilho, cor e orientação, e então treinaram seu sistema ao lado de 17 métodos líderes de extração de estradas e segmentação, incluindo tanto redes convolucionais clássicas quanto arquiteturas mais recentes baseadas em transformers. Em todas as principais métricas de precisão — quanto da área verdadeira da estrada é capturada, com que frequência estradas falsas são evitadas e quão bem os mapas previstos e reais se sobrepõem — o DS-Unet consistentemente ficou à frente, mantendo ainda velocidade suficiente para ser prático em mapeamento em grande escala.
O que isso significa para mapas melhores
Em termos simples, este trabalho mostra que ensinar uma rede neural a tanto eliminar a desordem de fundo quanto entender a disposição mais ampla da cena pode fornecer mapas de estradas mais limpos e conectados a partir de imagens de satélite. Em conjunto com uma regra de aprendizado mais estável que mantém as unidades internas do modelo ativamente melhorando, o DS-Unet traça ruas estreitas de vilarejos, evita confundir trilhas de terra com estradas reais e liga fragmentos de estrada dispersos em redes coerentes melhor do que sistemas existentes. À medida que agências de mapeamento e empresas de tecnologia avançam em direção a mapas totalmente automatizados e atualizados com frequência, abordagens como o DS-Unet podem desempenhar papel-chave em transformar imagens brutas em informações viárias precisas e utilizáveis no dia a dia.
Citação: Wang, J., Huang, Z., Ren, C. et al. Enhancing remote sensing road extraction via DS-Unet with complementary attention and surrogate gradients. Sci Rep 16, 9044 (2026). https://doi.org/10.1038/s41598-026-39811-x
Palavras-chave: estradas em sensoriamento remoto, mapeamento por satélite, segmentação por deep learning, redes com atenção, análise de imagens aéreas