Clear Sky Science · pt
ACFM: algoritmo de fusão ponderada por canal adaptativo para melhorar a detecção de pequenos objetos em tráfego com VANTs
Vendo Mais do Alto
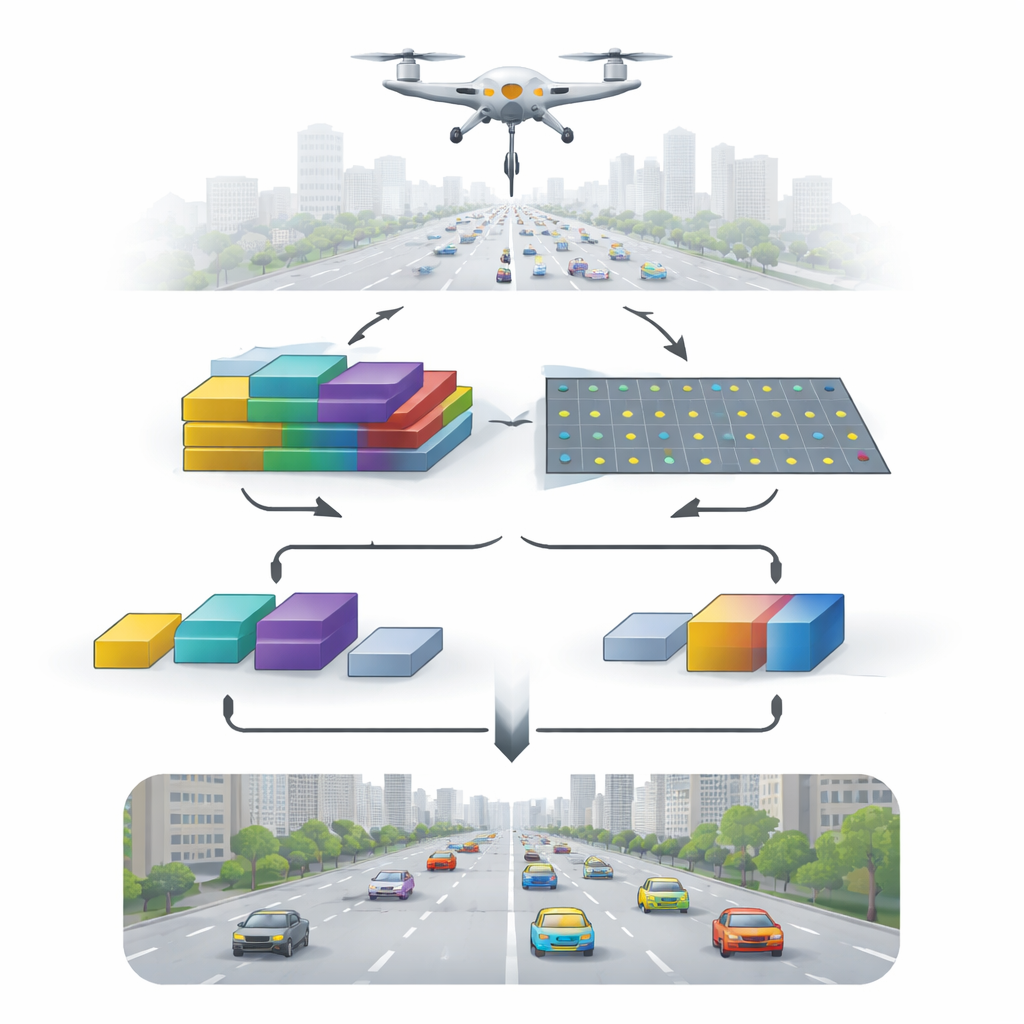
À medida que drones monitoram cada vez mais o tráfego, a segurança de multidões e zonas de desastre, enfrentam um problema simples porém persistente: vistos de cima, os alvos que nos interessam — carros, ônibus e até pessoas — frequentemente ocupam apenas alguns pixels. Essas minúsculas manchas são fáceis de passar despercebidas por algoritmos, especialmente em ruas urbanas cheias de sombras, placas e desfoque de movimento. Este artigo apresenta uma nova forma de ajudar computadores a “ver” esses pequenos objetos com mais clareza em filmagens de drones, sem tornar a detecção excessivamente lenta.
Por Que Pontinhos Importam
Câmeras de drone capturam cenas amplas a grandes altitudes, de modo que uma única imagem pode conter rodovias, prédios, árvores e dezenas de veículos. A maioria desses veículos aparece muito pequena e pode se sobrepor ou ficar oculta atrás de outros. Detectores tradicionais baseados em deep learning são excelentes para achar objetos grandes e nítidos, mas tendem a perder detalhes finos à medida que a informação atravessa camadas mais profundas da rede. O resultado é que veículos pequenos se confundem com o fundo, particularmente em cruzamentos lotados, baixa luminosidade ou filmagens levemente desfocadas. Métodos existentes de múltiplas escalas ajudam até certo ponto ao combinar informações de diferentes camadas da rede, mas geralmente dependem de regras fixas predefinidas e têm dificuldade para se adaptar quando a cena se torna especialmente complexa ou carregada.
Uma Forma Mais Inteligente de Combinar Pistas
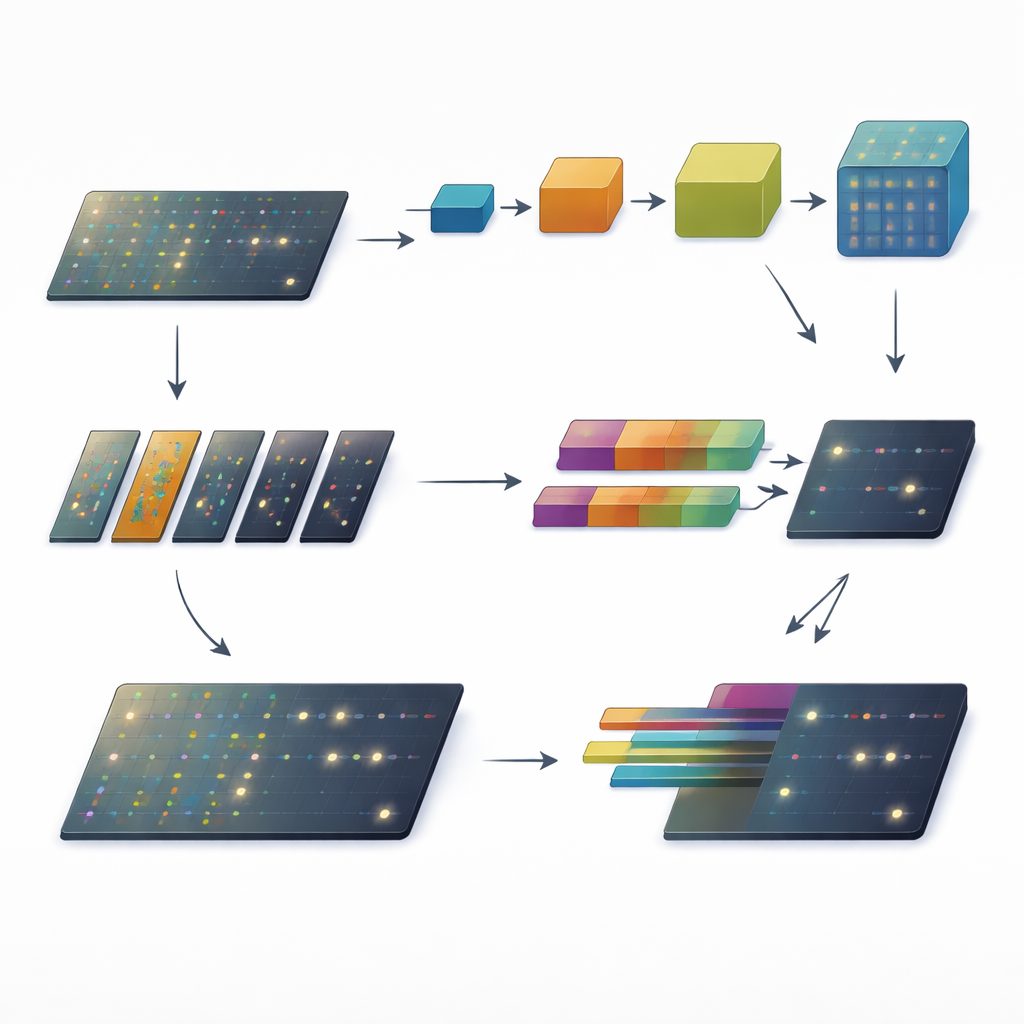
Os autores propõem um módulo de fusão ponderada por canal adaptativo, ou ACFM, projetado para ser encaixado em detectores de objetos existentes e torná-los melhores em identificar alvos pequenos em cenas de tráfego por drone. Em vez de tratar todas as informações visuais igualmente, o ACFM executa duas ramificações especializadas em paralelo e então funde seus resultados de forma dependente da cena. Uma ramificação refina como as características são tratadas através das escalas para que detalhes espaciais finos não sejam diluídos. A outra atua como um holofote, reforçando sinais realmente importantes de pequenos objetos enquanto suprime padrões de fundo que distraem. Crucialmente, a fusão entre essas ramificações não é fixa. O ACFM ajusta quanto confia em cada ramo de acordo com a imagem atual, permitindo que o sistema responda de forma diferente a uma rodovia vazia e a um cruzamento denso.
Preservando Detalhes entre Escalas
Na primeira ramificação, chamada bloco de refinamento multiescala, a rede envia as características por um par de caminhos. Um caminho simplesmente preserva a informação original, garantindo que os detalhes finos e em alta resolução sobrevivam. O outro caminho comprime e então expande a representação da imagem, incentivando o modelo a entender o contexto mais amplo de onde os pequenos veículos estão localizados na cena. Ao final, esses caminhos são mesclados para que cada pixel de saída se beneficie tanto do detalhe local nítido quanto da compreensão da área ao redor. Isso facilita para o detector traçar caixas delimitadoras mais precisas e consistentes em torno de carros e ônibus pequenos de diferentes tamanhos, mesmo quando o fundo está carregado ou parcialmente obstruído.
Reduzindo o Ruído de Fundo
A segunda ramificação foca na atenção. Ela divide os canais de característica em grupos e, para cada grupo, aprende uma “máscara” esparsa que destaca apenas as regiões mais promissoras. Áreas que se parecem com fundo — superfícies de estrada, telhados de prédios, copas de árvores — são atenuadas, enquanto sinais pequenos porém significativos, como reflexos e bordas de veículos, são amplificados. Ao combinar esses detalhes realçados de volta com as características originais de forma controlada, esse ramo de atenção esparsa agrupada produz uma visão da cena mais limpa e discriminativa. Isso reduz a probabilidade de o detector confundir padrões no asfalto ou sombras de edifícios com veículos reais.
Deixando a Cena Escolher a Mistura
A peça final do ACFM é um mecanismo de ponderação adaptativa ao nível de canal que decide, canal por canal, quanto confiar em cada ramificação. Primeiro ele sumariza o que está acontecendo em toda a imagem e então usa uma operação leve para inferir um conjunto de pesos entre zero e um. Se a cena for simples e os objetos estiverem bem separados, a rede pode apoiar-se mais no refinamento multiescala. Se a cena for densa, confusa ou barulhenta, pode deslocar mais ênfase para o ramo de atenção que suprime distrações de fundo. Esse balanceamento dinâmico substitui regras rígidas e feitas à mão por uma estratégia automática e orientada por dados, permitindo que o detector responda com flexibilidade à medida que as condições mudam de um quadro para outro.
Olhos Mais Aguçados para o Tráfego por Drone
Quando integrado a um detector popular chamado GFL e testado em três conjuntos públicos de dados de tráfego por drone, o ACFM melhorou consistentemente as métricas de detecção, especialmente em conjuntos desafiadores com muitos veículos pequenos e sobrepostos. Os ganhos em precisão vieram com pouco custo computacional adicional, o que significa que o sistema aprimorado pode ainda operar próximo ao tempo real — um requisito crítico para vigilância de tráfego prática. Para não especialistas, a conclusão é direta: preservando detalhes, suprimindo ruído e adaptando como as características são combinadas com base na cena, o ACFM ajuda drones a agir mais como observadores humanos atentos e menos como correspondentes rígidos de padrões, oferecendo uma base mais confiável para futuras aplicações de cidades inteligentes e monitoramento aéreo.
Citação: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
Palavras-chave: monitoramento de tráfego por drone, detecção de pequenos objetos, visão computacional, mecanismos de atenção, fusão de características em múltiplas escalas