Clear Sky Science · pt
Atenuação do ruído de medição em preditor de Smith modificado e controladores automáticos de offset para sistema integrador com tempo morto
Por que isso importa para a tecnologia do dia a dia
Muitos dispositivos dos quais dependemos — desde plantas químicas e sistemas de energia até automóveis e pequenos equipamentos de laboratório — devem reagir a leituras de sensores que chegam atrasadas e são poluídas por ruído. Este artigo faz uma pergunta simples, porém crucial: quando os sinais são retardados e ruidosos, que tipo de controlador automático mantém o sistema estável, preciso e suave para os equipamentos? Os autores comparam um método popular baseado em predição com uma abordagem mais recente que estima e cancela perturbações ativamente, revelando por que uma delas é muito mais confiável no mundo real, mais bagunçado.
Reações atrasadas e leituras de sensor instáveis
Em muitos processos, alterar uma entrada (como a potência de um aquecedor ou a posição de uma válvula) não afeta imediatamente a saída. Há um atraso inerente enquanto o calor se espalha, produtos químicos se misturam ou peças mecânicas se movem. Engenheiros costumam descrever esses sistemas como um “integrador mais tempo morto”: a saída continua acumulando o efeito da entrada, mas apenas após um período de espera. Ao mesmo tempo, sensores que medem temperatura, fluxo ou posição sempre contêm algum ruído aleatório. Um controlador precisa, portanto, conduzir um sistema cuja resposta é tanto retardada quanto observada através de uma lente tremida. Se isso for feito de forma inadequada, o sinal de controle pode oscilar brutalmente, desgastar atuadores e ainda assim não alcançar o valor desejado.
Preditor antigo versus removedor de offset novo
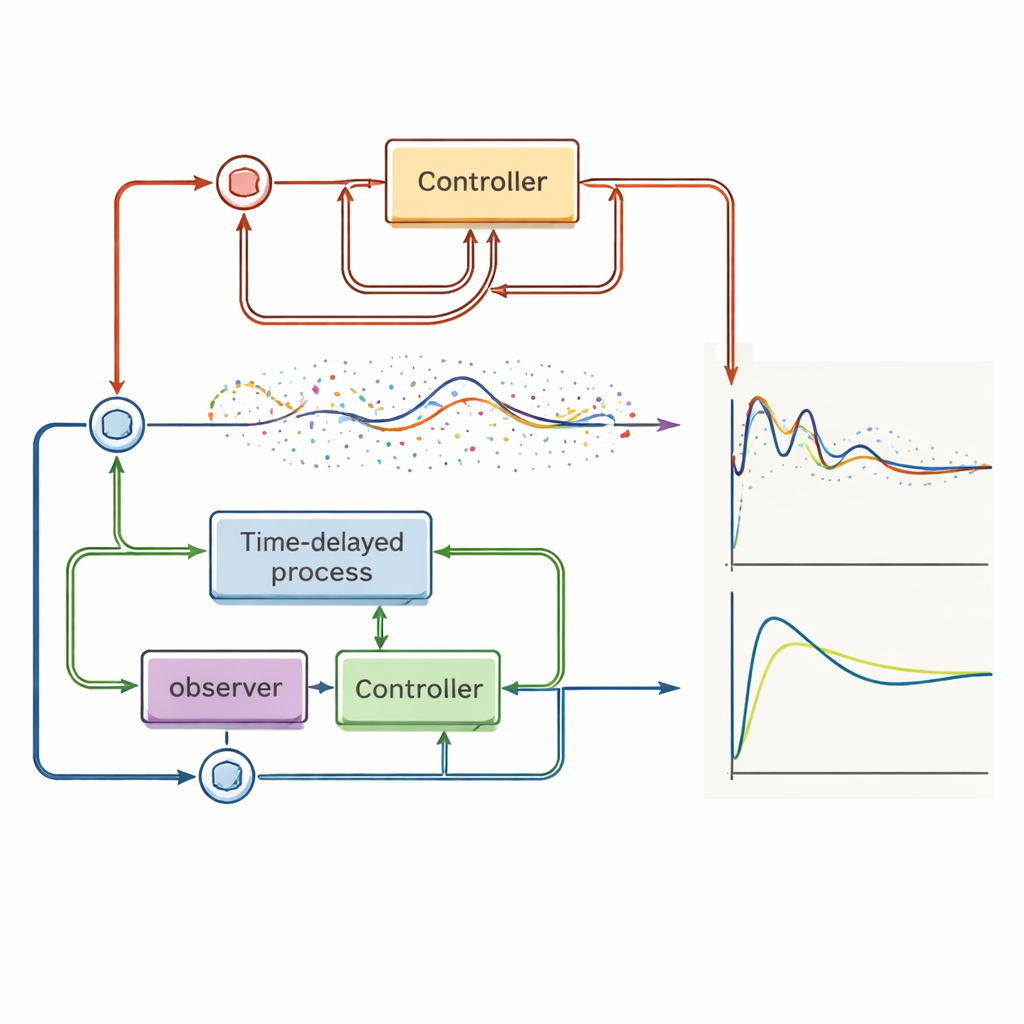
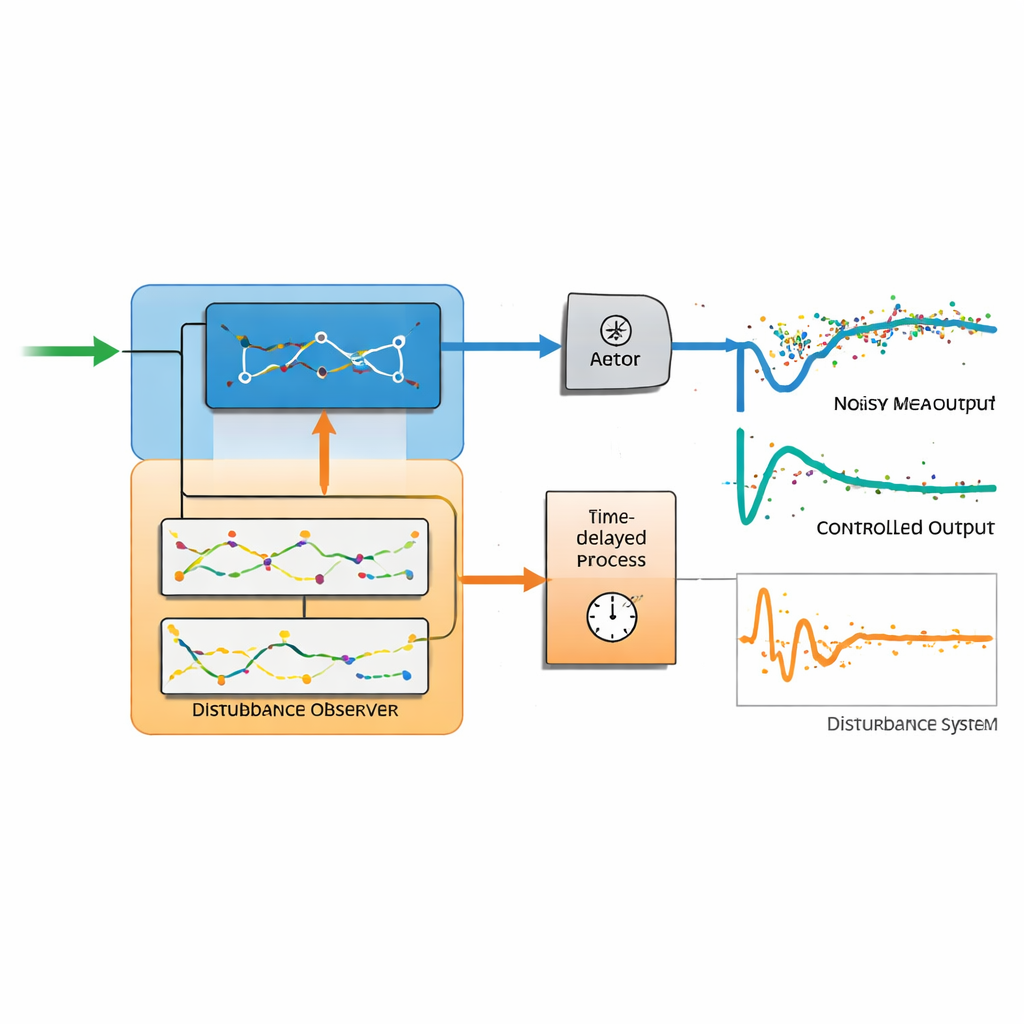
O preditor de Smith clássico e sua variante moderna, o preditor Åström–Smith, tratam o atraso construindo um modelo interno do processo e usando‑o para prever a saída futura. Em condições ideais, isso pode proporcionar respostas rápidas e precisas. O projeto concorrente examinado aqui, chamado controlador automático de offset, segue outro caminho. Ele combina um controlador estabilizador comum com um observador de perturbações — um módulo que infere as perturbações ocultas atuando na entrada e as cancela automaticamente. A sacada chave é que esse observador usa um modelo interno completo do sistema com tempo morto, junto com filtros passa‑baixo projetados cuidadosamente e, se necessário, derivadas de ordem superior da saída. Essa estrutura permite aos engenheiros ajustar a rapidez com que as perturbações são reconstruídas sem atrapalhar como o sistema acompanha um ponto de ajuste desejado.
O que acontece quando o ruído é real, não ideal
Quando os autores adicionam ruído de medição realista em simulações e experimentos, a diferença entre as duas abordagens torna‑se nítida. O controlador baseado em preditor, que depende de vários blocos integradores marginalmente estáveis, torna‑se extremamente sensível ao ruído. Mesmo para níveis de ruído tão baixos quanto cerca de um por cento do sinal, o esforço de controle explode — centenas a milhares de vezes maior do que com o controlador automático de offset — e o sinal do atuador passa a tremer violentamente. Pior, o preditor já não consegue garantir que a saída eventualmente iguale o ponto de ajuste: aparecem offsets persistentes e até instabilidade, especialmente quando os atuadores atingem seus limites de saturação. Em contraste, o controlador automático de offset mantém sinais de controle suaves, rejeita efetivamente perturbações constantes e mantém a saída próxima ao valor alvo, graças ao seu filtro e à estrutura de estimação de perturbações.
Submetendo os métodos a testes práticos
O artigo não se limita a modelos abstratos. Os autores aplicam ambos os controladores a um reator químico instável aproximado por um modelo simples dominado por atraso, e a um conjunto térmico de laboratório real construído em torno de uma lâmpada, sensor de temperatura e ventilador de resfriamento. No caso instável, o controlador automático de offset ainda funciona de forma confiável, embora seu ajuste deva ser suavizado para evitar sobre‑impulsos, enquanto o método baseado em preditor sofre com erros crescentes à medida que o ruído se intensifica. Na planta térmica, o controlador automático de offset produz respostas quase ótimas em tempo, que são suaves tanto na temperatura quanto no esforço de controle, mesmo quando o ventilador provoca mudanças repentinas. O controlador baseado em preditor, em contraste, mostra erros estacionários visíveis e comportamento notavelmente mais lento e menos confiável sempre que há ruído realista e limites de atuador presentes.
O que isso significa para controladores futuros
Do ponto de vista leigo, a conclusão é clara: um controlador que apenas prevê o futuro com base em um modelo ideal pode parecer impressionante no papel, mas pode se comportar muito mal quando ruído e limites do mundo real aparecem. O controlador automático de offset, com seu observador de perturbações embutido e modelo interno filtrado cuidadosamente, mostra‑se mais robusto, mais preciso e mais fácil de ajustar em uma ampla gama de processos com atraso. Os autores concluem que, embora um preditor de Smith modificado ainda possa ser útil em situações de nicho com pouco ruído, um projeto baseado em observador de perturbações é uma escolha padrão mais simples e confiável para sistemas de controle modernos onde sensores são imperfeitos e a estabilidade realmente importa.
Citação: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Palavras-chave: controle com atraso de tempo, observador de perturbações, ruído de medição, controlador automático de offset, preditor de Smith