Clear Sky Science · pt
Fusão Gaussian-Haar melhora DEIM para detecção da maturidade da romã
Colheitas mais inteligentes para um mundo em crescimento
Saber exatamente quando a fruta está pronta para ser colhida é uma das decisões mais importantes — e mais difíceis — na agricultura. Este estudo aborda esse problema para a romã, uma cultura de crescente importância econômica e nutricional. Em vez de depender dos olhos humanos ou de testes laboratoriais lentos, os autores apresentam um sistema compacto de inteligência artificial capaz de analisar fotos comuns tomadas em pomares reais e determinar em que estágio de desenvolvimento cada romã se encontra, de pequenos botões a fruto totalmente amadurecido. O objetivo é tornar a colheita automatizada, a previsão de produtividade e o manejo do pomar mais rápidos, precisos e práticos, mesmo em dispositivos de baixo consumo.
Por que é difícil ver o crescimento da romã
Em pomares reais, localizar romãs não é tão simples quanto parece. No início da estação, frutas pequenas e verdes quase desaparecem entre folhas densas, confundindo muitos métodos de visão computacional que se baseiam principalmente na cor. Mais tarde, frutos em amadurecimento podem ficar parcialmente escondidos pela folhagem ou projetar-se em sombras profundas por causa de iluminação desigual, fazendo com que algoritmos coloquem caixas de detecção no lugar errado ou não detectem frutas. A maioria dos sistemas anteriores também se concentra na fruta pós-colheita ou em um único ponto do ciclo de desenvolvimento, o que limita sua utilidade para planejar irrigação, adubação e controle de pragas ao longo de toda a estação. Além disso, modelos muito precisos costumam ser grandes e consumidores de energia, inviabilizando sua execução nos pequenos computadores usados por robôs de campo e dispositivos de borda.
Ensinar uma câmera a ver além da cor
Para superar esses obstáculos, os pesquisadores construíram um novo sistema de detecção que chamam de GLMF-DEIM. Primeiro, reuniram um conjunto de dados especializado com 5.855 imagens de alta qualidade de pomares em Shandong, China, capturadas de abril a outubro sob várias condições de iluminação e clima. Especialistas rotularam 11.482 botões, flores e frutos individuais, dividindo-os em cinco estágios de crescimento e três faixas de tamanho. Essa coleção rica permite que o modelo aprenda como as romãs aparecem em cada etapa do desenvolvimento, desde botões pequenos e fechados até frutos grandes e coloridos, e como elas se apresentam em diferentes horas do dia e graus de cobertura foliar.
Olhar para textura e detalhe, não apenas cor
No cerne do GLMF-DEIM está um conjunto de artifícios inteligentes que ajudam o computador a distinguir fruto de folhagem e a perceber características pequenas e sutis sem desperdiçar computação. Um módulo de entrada usa uma operação matemática semelhante a dividir o som em notas graves e agudas. Ele decompõe a imagem em regiões suaves e em bordas nítidas, após um leve suavizado que remove ruídos de fundo minúsculos. Como as cascas da romã são relativamente lisas enquanto as folhas formam um fundo texturizado e agitado, essa visão baseada em frequência facilita separá-las mesmo quando compartilham o mesmo tom de verde. Outros módulos leves adaptam como a imagem é reduzida de tamanho para que detalhes de superfície importantes para a maturidade sejam preservados, e aprendem a dar atenção especial a informações espalhadas por diferentes escalas espaciais, desde pequenos botões até grandes frutos maduros.
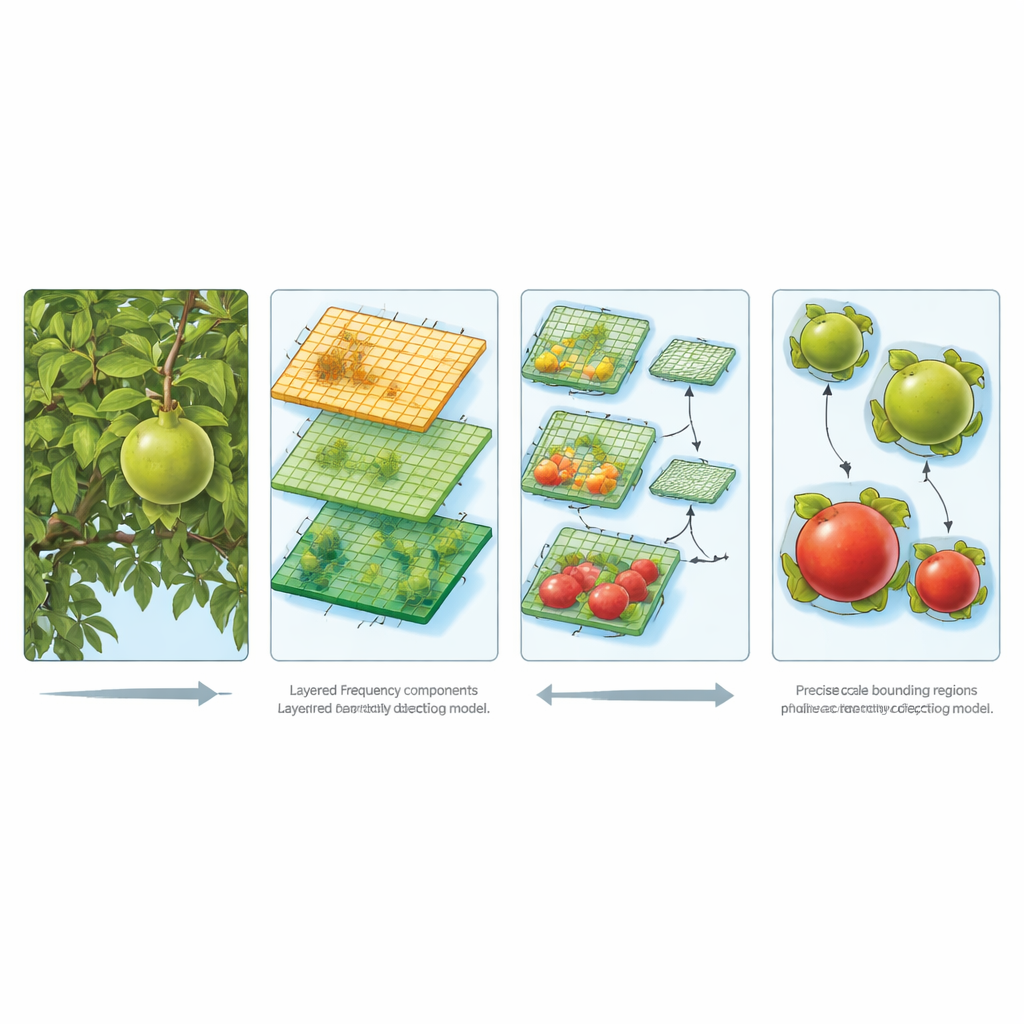
Ver toda fruta, grande ou pequena
Além de reconhecer texturas isoladas, o sistema precisa lidar com frutos de muitos tamanhos espalhados pela cena. Para isso, os autores projetaram uma rede de fusão de características que constrói uma espécie de pirâmide de representações da imagem. Em níveis mais altos, o modelo captura formas amplas; em níveis mais baixos, preserva bordas e padrões finos. A informação flui tanto para cima quanto para baixo nessa pirâmide, de modo que cada camada de detecção compreenda contexto e detalhe local. A cabeça de detecção então usa uma arquitetura moderna de “transformer” — uma forma de modelar relações entre muitos pontos de uma imagem ao mesmo tempo — combinada com uma estratégia de treinamento refinada que fornece exemplos densamente variados e uma função de perda que pune tanto erros excessivamente confiantes quanto acertos de baixa confiança. Em conjunto, essas escolhas ajudam o sistema a convergir rapidamente e a permanecer robusto em cenas difíceis com frutos sobrepostos e fundos confusos.
Melhor precisão com menos poder computacional
Em testes comparativos com os principais sistemas de detecção de objetos, a nova abordagem se destaca. Ela identifica corretamente romãs maduras com cerca de 93% de precisão em uma configuração de avaliação padrão e mantém desempenho forte mesmo sob regras de pontuação mais rigorosas. Mostra ganhos especialmente notáveis para alvos pequenos e difíceis de enxergar, mantendo-se excelente em frutos grandes. Ao mesmo tempo, usa muito menos cálculos e parâmetros do que modelos pesados, tornando-a adequada para implantação em robôs de campo, drones ou estações de monitoramento de baixo custo. Em termos práticos, isso significa que um dispositivo equipado com câmera poderia percorrer um pomar de romã, acompanhar de forma confiável o progresso dos frutos de cada árvore e ajudar os agricultores a decidir quando e onde colher ou intervir — tudo sem precisar de um supercomputador no celeiro.
Citação: Wang, Y., Liu, S., Hao, P. et al. Gaussian-Haar transform fusion enhances DEIM for pomegranate maturity detection. Sci Rep 16, 8246 (2026). https://doi.org/10.1038/s41598-026-39620-2
Palavras-chave: detecção de romã, maturidade de frutas, agricultura inteligente, visão computacional, modelos de aprendizado profundo