Clear Sky Science · pt
Controle direto sequencial preditivo de velocidade de PMSM
Controle mais inteligente para motores elétricos do dia a dia
Motores elétricos alimentam discretamente linhas de fábrica, bombas, robôs e até alguns eletrodomésticos. Fazer com que esses motores operem com eficiência e suavidade economiza energia, reduz ruído e desgaste, e melhora a confiabilidade. Este artigo explora uma nova forma de controlar um tipo popular de motor para que ele reaja rapidamente a mudanças sem ficar instável ou gerar “ruído” elétrico excessivo. Os autores concentram‑se em uma estratégia que promete ajuste mais simples para os engenheiros, mantendo controle de velocidade rápido e preciso.
Por que os controles de motor atuais são difíceis de ajustar
Motores síncronos de ímã permanente são amplamente usados porque são compactos, eficientes e permitem controle de velocidade preciso. Esquemas de controle tradicionais dependem de vários laços aninhados e de um conjunto de parâmetros que os engenheiros precisam ajustar por tentativa e erro. Abordagens mais recentes baseadas em controle preditivo buscam escolher a melhor ação para o motor frações de segundo à frente, melhorando o tempo de reação e permitindo tratar múltiplos objetivos (como velocidade precisa e baixa corrente) ao mesmo tempo. No entanto, esses controladores preditivos tipicamente combinam todos os objetivos em uma grande expressão matemática que depende de vários “fatores de ponderação”. Escolher esses pesos é notoriamente difícil: uma boa escolha pode gerar desempenho excelente, enquanto uma escolha ruim pode deixar o sistema lento ou mesmo instável.
Uma maneira passo a passo de tomar decisões
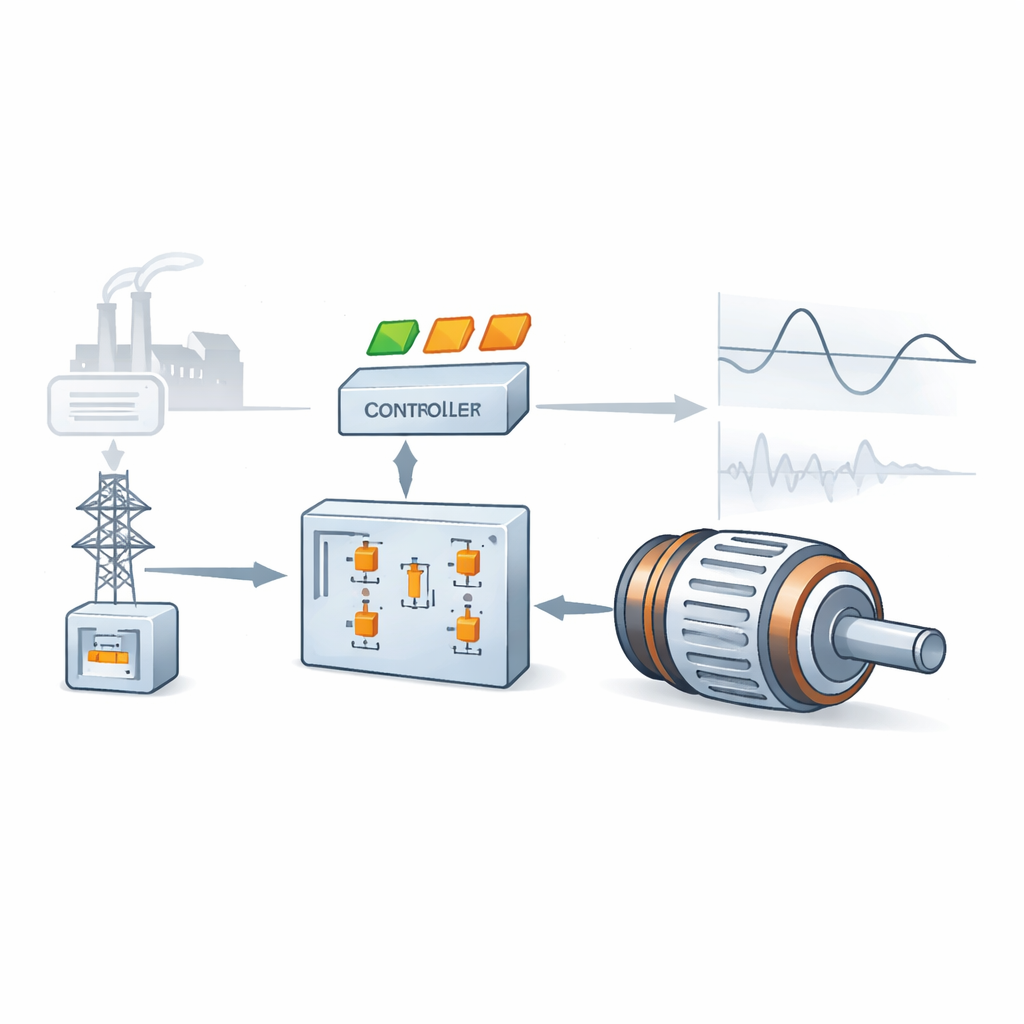
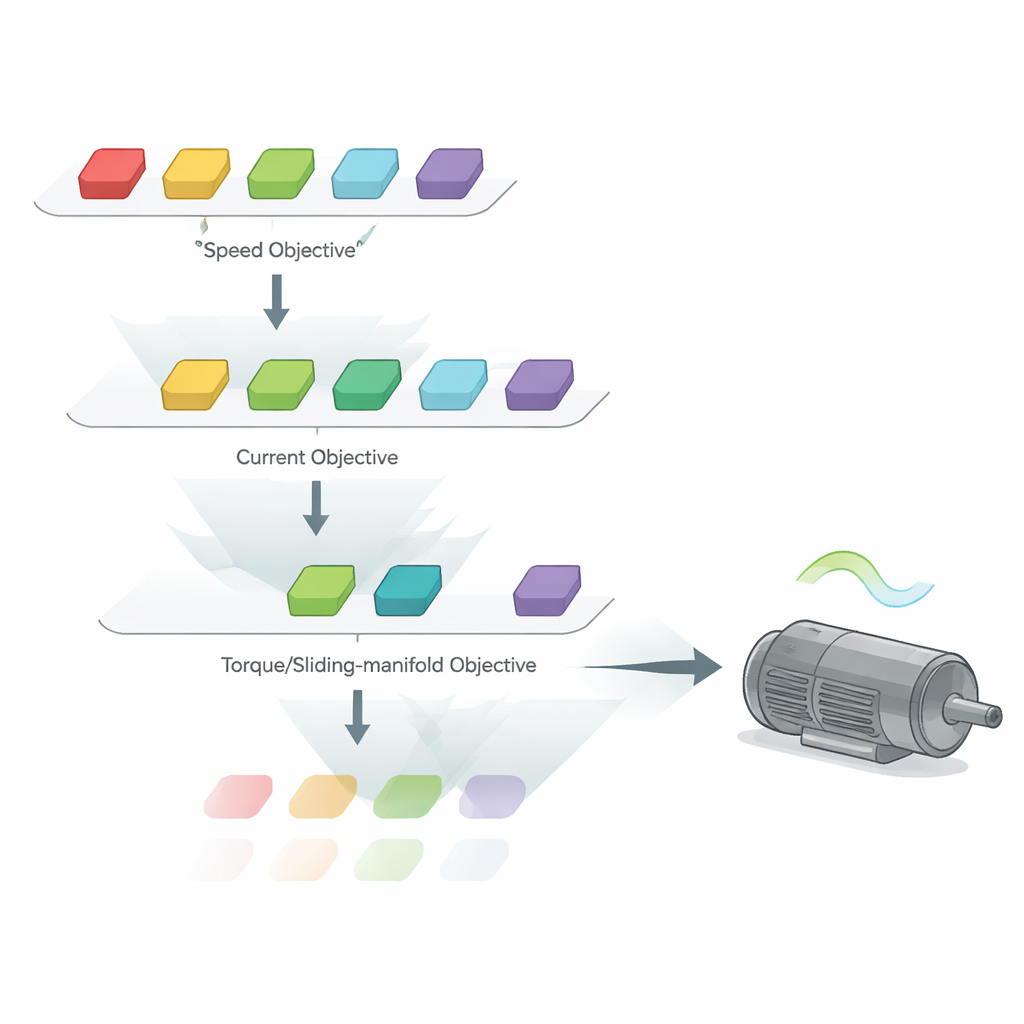
Em vez de agrupar todos os objetivos em uma fórmula complicada, os autores estudam uma abordagem “sequencial”. Aqui, o controlador ainda prevê como o motor se comportará para cada possível posição de chaveamento na eletrônica de potência, mas avalia objetivos separados e mais simples em sequência. Primeiro, elimina as opções de chaveamento que resultariam em comportamento de velocidade pobre. Em seguida, entre as opções restantes, mantém apenas aquelas que fazem uso eficiente da corrente. Finalmente, seleciona a opção que melhor molda o torque do motor, usando uma regra deslizante especial que vincula o erro de velocidade e o erro de torque para que a velocidade converja mais rapidamente. Como cada etapa foca em um único objetivo, não há necessidade de equilibrar vários fatores de ponderação; em vez disso, o controlador usa um processo lógico de eliminação. Um observador acompanhante estima o torque de carga desconhecido no eixo para que as previsões permaneçam precisas mesmo quando o motor é perturbado.
Melhorando a estabilidade com um projeto aprimorado
Quando os autores testaram inicialmente esse método sequencial, descobriram que, embora respondesse rapidamente a mudanças de velocidade, podia tornar‑se instável e produzir grandes ondulações na corrente do motor, especialmente quando tentavam forçá‑lo a reagir mais rápido. Para corrigir isso, propuseram uma versão aprimorada que adiciona um toque inteligente à primeira etapa de decisão: ela não apenas observa a velocidade prevista, mas também penaliza suavemente certos componentes de corrente, e escala essa penalidade com a velocidade solicitada. Em baixas velocidades, o controlador foca mais em manter as correntes sob controle; em velocidades maiores, permite ação mais agressiva para manter o desempenho. Essa mudança possibilita usar uma regra deslizante mais agressiva para o torque sem provocar instabilidade. Em simulações detalhadas por computador, o método aprimorado alcançou tempo de subida semelhante ao de um controlador preditivo convencional bem ajustado e produziu níveis semelhantes de distorção elétrica, tudo com menos parâmetros de ajuste.
Testando o método em laboratório
Em seguida, a equipe implementou tanto o controlador sequencial original quanto o aprimorado em um conjunto motriz real de 1,1 quilowatt usando uma plataforma de prototipagem rápida. Compararam‑nos com um controlador preditivo padrão sob condições realistas, incluindo rampas rápidas de velocidade, aplicação súbita de carga e até reversões de sentido. O controlador sequencial original conseguiu regular a velocidade, mas apresentou perda ocasional de estabilidade e fortes ondulações de corrente, particularmente em velocidades mais altas. Em contraste, a versão aprimorada operou de forma estável em toda a faixa testada. Ajustando um único parâmetro-chave que molda a regra deslizante, os pesquisadores puderam trocar entre maior fidelidade de velocidade e formas de onda de corrente mais suaves. Configurações intermediárias proporcionaram um equilíbrio prático: os erros de velocidade foram reduzidos de forma significativa em comparação com configurações conservadoras, enquanto o aumento na distorção de corrente permaneceu aceitável.
O que isso significa para acionamentos no mundo real
Para não especialistas, a mensagem principal é que os autores demonstraram uma forma mais simples, mas ainda poderosa, de controlar motores elétricos de alto desempenho. A estratégia sequencial aprimorada reduz grande parte do trabalho de adivinhação envolvido no ajuste de controladores preditivos tradicionais, preservando reações rápidas a mudanças de velocidade e perturbações. O método não é perfeito — as formas de onda de corrente ainda são um tanto mais ruidosas que o ideal, especialmente em configurações muito exigentes — mas representa um passo importante rumo a acionamentos de motor mais robustos e fáceis de comissionar. Trabalhos futuros se concentrarão em reduzir essas distorções de corrente e analisar mais a estabilidade, com o objetivo de tornar esse tipo de controle sequencial inteligente adequado para sistemas industriais maiores e mais rigidamente regulados.
Citação: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Palavras-chave: motor síncrono de ímã permanente, controle preditivo de modelo, controle de velocidade do motor, controle sequencial, conversores eletrônicos de potência