Clear Sky Science · pt
Pesquisa sobre método inteligente de reconhecimento de peças mecânicas com alta similaridade de características em ambiente industrial
Por que identificar peças parecidas é importante
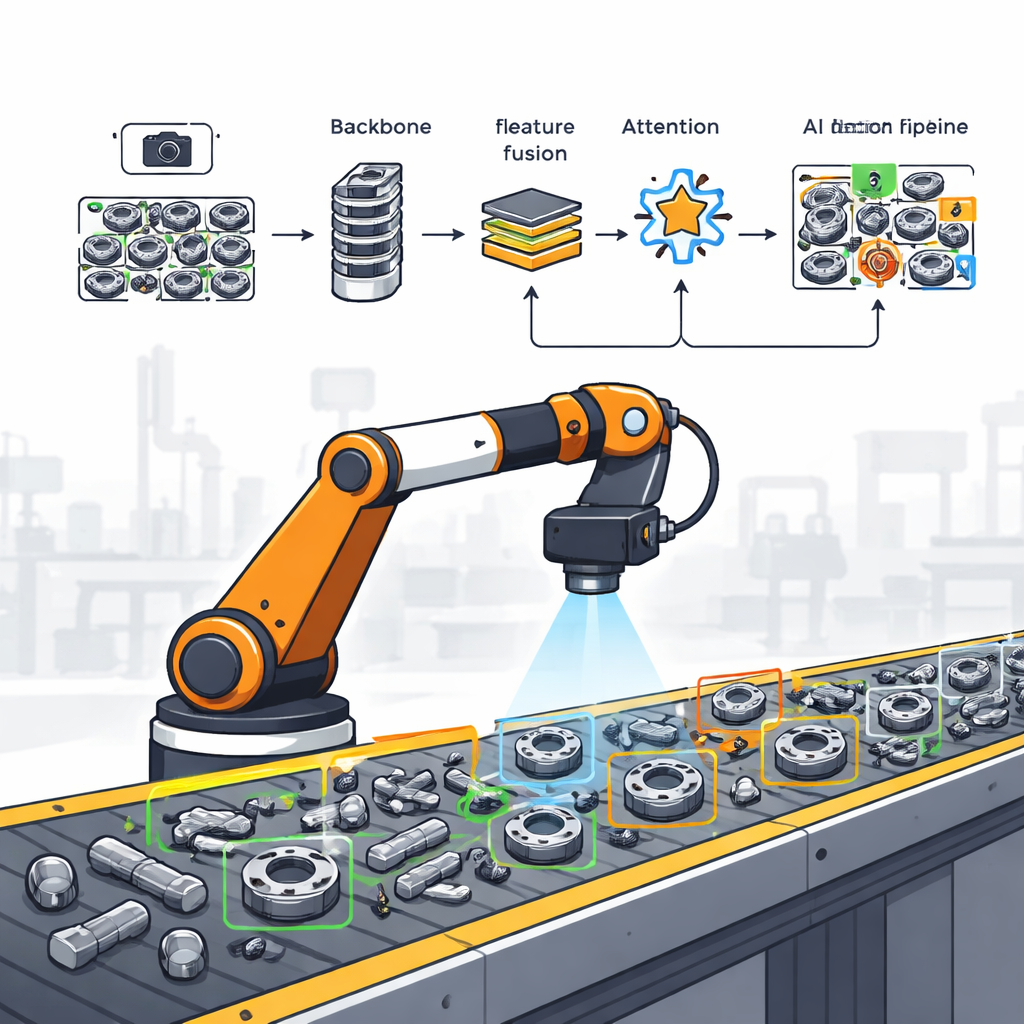
Fábricas modernas dependem de robôs para localizar, pegar e montar milhares de pequenas peças metálicas. Muitas dessas peças — engrenagens, rolamentos, coroas, porcas e parafusos — parecem confusamente semelhantes, especialmente sob iluminação adversa ou quando se sobrepõem em uma esteira. Se um robô confunde uma peça com outra, o resultado pode ser engarrafamentos, defeitos ou até danos a máquinas. Este estudo aborda uma pergunta aparentemente simples com grandes consequências industriais: como um sistema de visão compacto e rápido pode distinguir de forma confiável peças quase idênticas em condições reais de oficina?
Desafios da visão em fábricas reais
No chão de fábrica, as câmeras raramente têm as vistas limpas usadas em vídeos de demonstração. A iluminação é desigual, causando reflexos fortes em metais brilhantes e sombras profundas em outras regiões. Peças são despejadas em cestos ou espalhadas em correias, frequentemente parcialmente ocultando‑se umas às outras. Para piorar, muitos componentes metálicos compartilham formas, cores e texturas semelhantes, deixando poucas pistas visuais óbvias. Softwares tradicionais que fazem correspondência por template ou extraem características manuais sofrem muito nessas condições: são lentos, frágeis diante de variações de luz e frequentemente falham quando as peças se sobrepõem ou giram em ângulos inesperados.
Baseando‑se em detectores rápidos de uma só passada
Nos últimos anos, uma família de modelos de inteligência artificial chamada YOLO (do inglês “You Only Look Once”) tornou‑se popular para detectar objetos em imagens em uma única e rápida passagem. O YOLOv8, uma das versões mais recentes, já equilibra bem precisão e velocidade e pode rodar em tempo real. Entretanto, quando peças diferentes são quase idênticas, mesmo o YOLOv8 pode deixar passar pistas sutis ou gerar caixas imprecisas. Tentativas anteriores de reduzir modelos YOLO para dispositivos pequenos costumavam cortar parâmetros, mas também enfraqueciam a capacidade de representar detalhes finos — precisamente o que é necessário para distinguir peças mecânicas semelhantes.
Uma rede de detecção mais enxuta e mais precisa
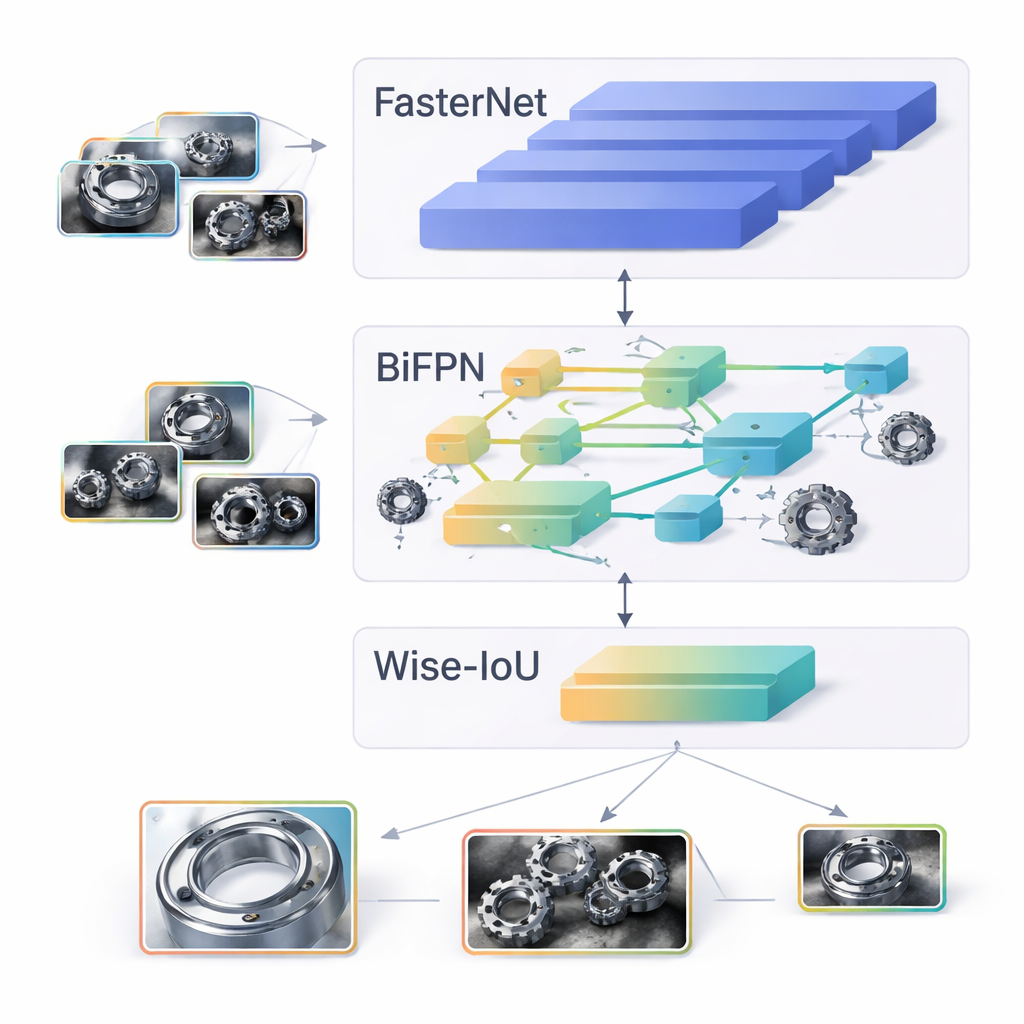
Os autores propõem uma versão aprimorada do menor modelo YOLOv8, chamada YOLOv8n, adaptada especificamente para peças industriais confusas e para hardware com potência de cálculo limitada. Primeiro, eles substituem o núcleo padrão da rede por um projeto mais novo chamado FasterNet, que utiliza um truque de convolução “parcial” para operar apenas nas regiões mais úteis da imagem em cada etapa. Isso reduz trabalho repetido em memória sem perder informações visuais chave. Em segundo lugar, redesenham o “pescoço” intermediário da rede para usar uma pirâmide de recursos bidirecional (BiFPN), que permite o fluxo de informações tanto de visões globais e grosseiras para detalhes finos quanto de detalhes finos de volta para cima, de modo que peças pequenas e ocluídas se beneficiem do contexto e vice‑versa.
Ensinando a rede a ignorar pistas ruins
Além da estrutura da rede, a forma como ela aprende a ajustar seus parâmetros — guiada por uma função de perda — afeta fortemente aquilo a que dá atenção. Métodos de treinamento padrão tratam todos os exemplos mais ou menos igualmente, o que significa que caixas de treinamento de baixa qualidade (mal alinhadas ou ambíguas) podem enganar o modelo. Os autores substituem a regra usual de correspondência de caixas por um método chamado Wise‑IoU. Em termos simples, essa abordagem avalia cada exemplo de treinamento não apenas pelo grau de sobreposição, mas também por quanto ele é um “outlier”, e então reduz discretamente a influência desses exemplos pouco confiáveis. Com o tempo, o sistema aprende principalmente com peças bem rotuladas e claras, levando a caixas de detecção mais ajustadas e mais confiáveis, especialmente quando as peças se sobrepõem ou aparecem sob iluminação difícil.
Testando o sistema
Para avaliar seu projeto, a equipe construiu sua própria coleção de imagens de seis peças mecânicas comuns, cada uma capturada 1.250 vezes sob diferentes níveis de luz e com variados graus de bloqueio mútuo. Eles compararam seu modelo aprimorado com o YOLOv8n padrão e diversos outros detectores leves. O novo sistema alcançou maior qualidade geral de detecção enquanto usava menos de dois terços da computação e reduzia o número de parâmetros em cerca de 42%. Em particular, elevou uma pontuação chave chamada mean average precision em um limiar usual em 1,5 ponto percentual, mantendo eficiência suficiente para uso em tempo real em hardware modesto.
O que isso significa para fábricas inteligentes
Em termos práticos, o estudo mostra que robôs de fábrica podem ficar tanto mais inteligentes quanto mais enxutos. Com o núcleo de rede redesenhado, fusão de recursos mais inteligente e uma regra de aprendizado mais seletiva, um modelo de IA pequeno pode distinguir de forma mais confiável entre engrenagens, rolamentos e outras peças parecidas em cenas reais e bagunçadas, mesmo quando a iluminação é fraca e as peças se sobrepõem. Essa combinação de maior precisão e menor carga computacional facilita a implantação de visão robusta em dispositivos de borda de baixo custo, abrindo caminho para linhas de produção totalmente automatizadas e mais flexíveis sem precisar de servidores massivos ou ambientes perfeitamente controlados.
Citação: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Palavras-chave: detecção de objetos industriais, peças mecânicas, deep learning leve, YOLOv8, automação fabril