Clear Sky Science · pt
Estratégia de reconstrução de dados de trajetória de veículos para reconhecimento por vídeo baseada em um método de dois passos de filtragem por interpolação
Por que limpar os dados de tráfego digital realmente importa
Cada vez que uma câmera de tráfego observa carros passando por um cruzamento, ela gera um fluxo oculto de dados que descreve para onde cada veículo vai, com que velocidade se move e como acelera ou freia. Essas informações são valiosas para estradas mais seguras, semáforos mais inteligentes e futuros carros autônomos. Mas, na prática, esses dados são confusos: veículos ficam ocultos atrás de caminhões, faróis ofuscam em dias de chuva e os sistemas de visão computacional cometem erros. Este estudo aborda uma questão muito prática: como transformar esses dados de vídeo falhos em um registro confiável de como os veículos realmente se movem?
Quando as câmeras interpretam mal o movimento dos carros
O rastreamento baseado em vídeo é atraente porque é barato, não intrusivo e cobre grandes áreas. Ainda assim, a saída bruta está repleta de dois problemas principais. O primeiro são erros óbvios, como um carro que parece saltar para trás, parar instantaneamente vindo da rodovia ou apresentar rajadas de aceleração impossíveis. Esses erros geralmente vêm de oclusão, borrão de movimento ou o software de rastreio perder momentaneamente o veículo. O segundo problema é a oscilação aleatória—pequenos tremores rápidos na posição reportada. Quando velocidades e acelerações são calculadas a partir dessas posições, os tremores se ampliam, fazendo com que uma condução normal pareça errática. Se não forem corrigidos, esses problemas podem distorcer modelos de tráfego em mais de 40%, o que por sua vez pode induzir a erro estudos de segurança e sistemas de condução automatizada.
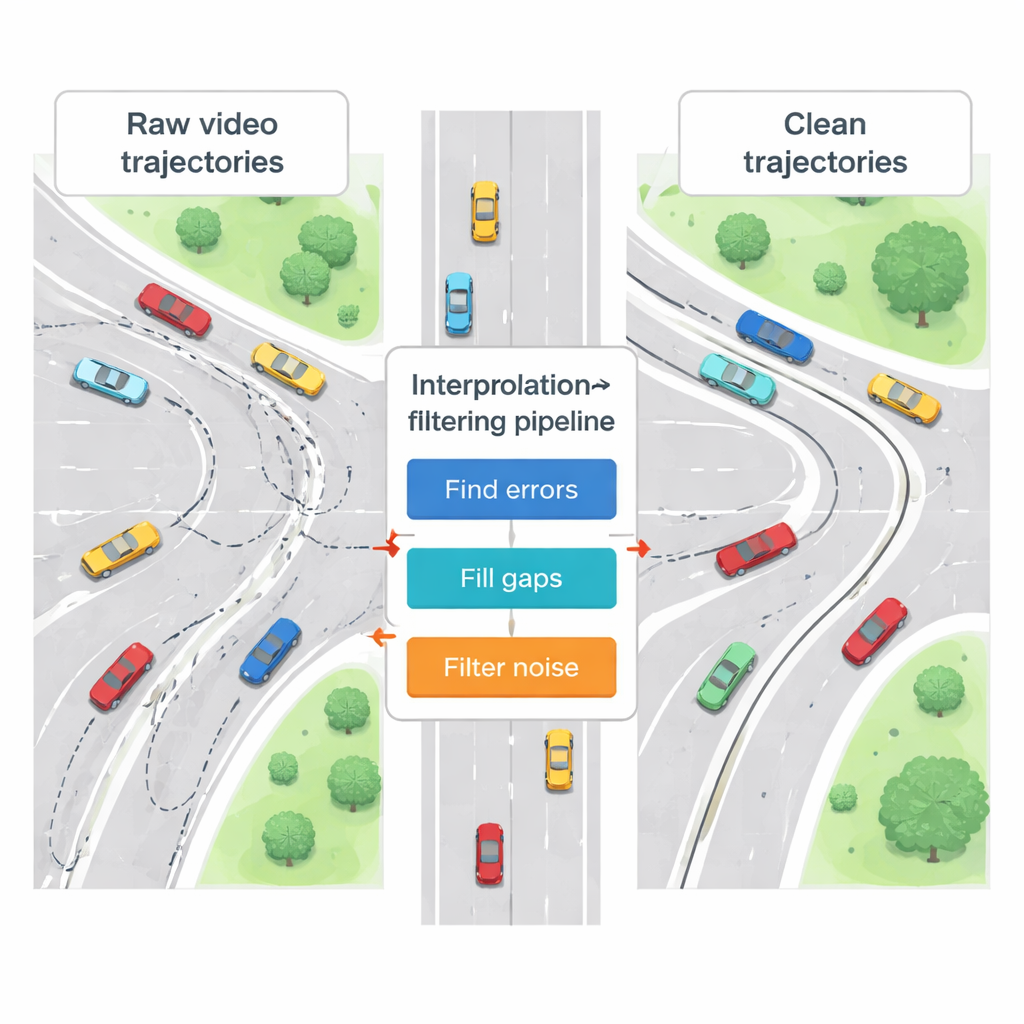
Um plano de limpeza em dois passos
Para reparar esse dano, os autores propõem uma estratégia de reconstrução em dois passos que funciona como um mecânico digital cuidadoso. O primeiro passo foca em erros óbvios: ele varre o registro de cada veículo em busca de velocidades e acelerações que rompem limites físicos simples, como jerk extremamente alto (mudanças muito súbitas na aceleração) ou aceleração além do que um carro e motorista real tolerariam. Uma vez identificados esses pontos atípicos, eles são substituídos usando ferramentas matemáticas chamadas interpolação, que estimam valores ausentes a partir de pontos vizinhos mais confiáveis. O estudo compara várias variantes de interpolação e conclui que uma abordagem chamada interpolação de Hermite preserva melhor a forma natural da trajetória do que um método mais tradicional de Lagrange, especialmente quando o movimento é complexo.
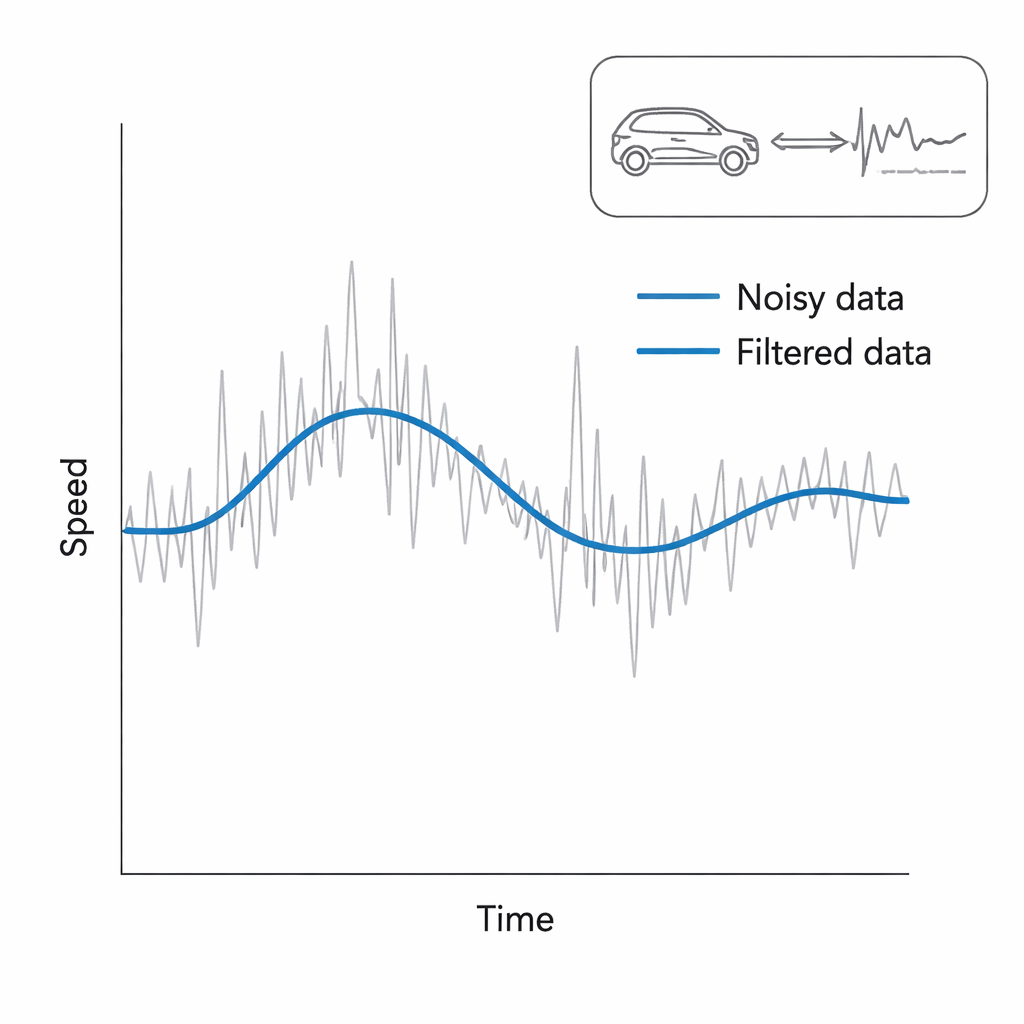
Suavizando a jornada digital
O segundo passo trata do problema mais sutil do ruído. Mesmo depois de corrigidos os erros grosseiros, os vestígios remanescentes ainda podem parecer levemente trêmulos. Aqui os pesquisadores testam duas formas de suavizar os dados: um método refinado de média móvel que dá mais peso a pontos recentes, e uma técnica estatística conhecida como filtro de Kalman, que atualiza continuamente sua melhor estimativa da posição e velocidade reais de um carro à medida que novas medições chegam. Ambas as técnicas reduzem a oscilação, mas o filtro de Kalman faz um trabalho melhor em seguir mudanças reais na condução—por exemplo, uma frenagem suave ou uma troca de faixa—sem torná-las indistintas. O resultado é uma descrição mais suave e realista de como cada veículo realmente se comportou ao longo do tempo.
Colocando o método à prova
A equipe aplica sua estrutura a vídeo real capturado em um movimentado cruzamento urbano em Zhengzhou, China, usando software moderno de detecção e rastreio de objetos para extrair trajetórias de veículos. Em seguida, eles submetem dezenas de trajetórias a seu processo em dois passos e avaliam o sucesso usando medidas físicas simples: quão amplamente a aceleração flutua e com que frequência o jerk excede um nível considerado irrealista para carros de passeio. Eles também comparam as trajetórias de vídeo limpadas com dados de referência registrados diretamente pelos instrumentos do painel de um carro. Em muitos padrões de condução—cruzeiro constante, frenagens bruscas, mudanças de faixa—a estratégia combinada de interpolação e filtragem reduz a variabilidade da aceleração em cerca de 85% e praticamente elimina picos de jerk implausíveis, ao mesmo tempo em que se aproxima mais dos registros instrumentais do que vários métodos concorrentes.
O que isso significa para o deslocamento cotidiano
Em termos simples, este artigo mostra como transformar imagens imperfeitas de câmeras de tráfego comuns em dados nos quais engenheiros e veículos automatizados podem realmente confiar. Ao primeiro reparar falhas óbvias e depois suavizar cuidadosamente o ruído, o método proposto produz rastros digitais realistas de como os carros se movem, sem exigir hardware exótico ou grande poder computacional. Essa imagem mais limpa pode ser usada para melhorar o temporização de semáforos, simulações mais precisas de congestionamento e algoritmos de direção autônoma mais seguros que dependem do entendimento do comportamento de condução no mundo real. Embora o estudo se concentre em uma cidade e ainda não cubra todas as condições climáticas ou de estrada, ele traça um caminho claro e prático para usar redes de vídeo existentes como sensores confiáveis para a próxima geração de sistemas de transporte inteligente.
Citação: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Palavras-chave: trajetória de veículo, dados de vídeo de tráfego, remoção de ruído de dados, transporte inteligente, condução autônoma