Clear Sky Science · pt
Controle neural adaptativo baseado em ESO para um quadrotor contra distúrbios de vento e carga
Manter Drones Estáveis em um Mundo Real Desordenado
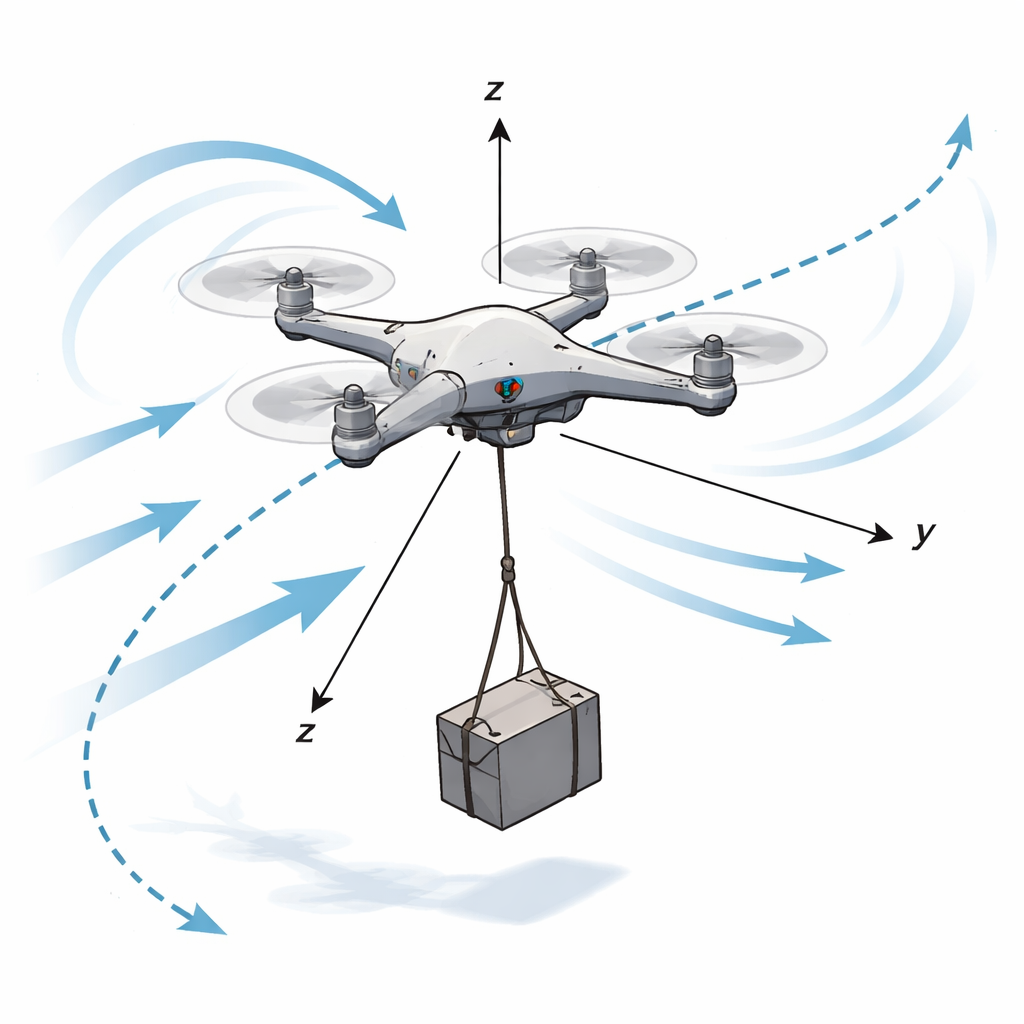
Pequenos drones de quatro rotores são cada vez mais usados em tarefas como inspeção de pontes, monitoramento de plantações ou transporte de pequenos pacotes. Mas, no mundo real, esses robôs voadores enfrentam rajadas de vento e cargas oscilantes suspensas abaixo deles, ambos capazes de desviá‑los facilmente do trajeto. Este artigo apresenta uma nova forma de manter esses drones voando suavemente ao longo de trajetórias planejadas, mesmo quando o ar está turbulento e uma carga oscilante os puxa.
Por que Vento e Cargas Suspensas São Tão Problemáticos
Um drone quadrotor é intrinsecamente difícil de controlar. Ele é leve, responde rapidamente a pequenas variações dos motores, e seus movimentos em diferentes direções são fortemente acoplados. Quando ventos fortes ou rapidamente variáveis atingem o drone, eles o empurram de forma imprevisível. Acrescentar uma carga suspensa por cabo, como um suporte de câmera ou uma garrafa de líquido, piora a situação: a carga pode oscilar como um pêndulo, devolvendo forças adicionais ao drone. Controladores tradicionais, como o amplamente usado PID ou esquemas mais avançados de sliding‑mode e backstepping, funcionam bem apenas quando os engenheiros conhecem a física do drone com bastante precisão e quando os distúrbios são moderados. Se o modelo matemático estiver impreciso, ou se as forças do vento e da carga mudarem de maneiras complexas, esses métodos podem gerar respostas lentas, overshoot ou oscilações visíveis durante o voo.
Um Cão de Guarda Inteligente para Distúrbios Ocultos
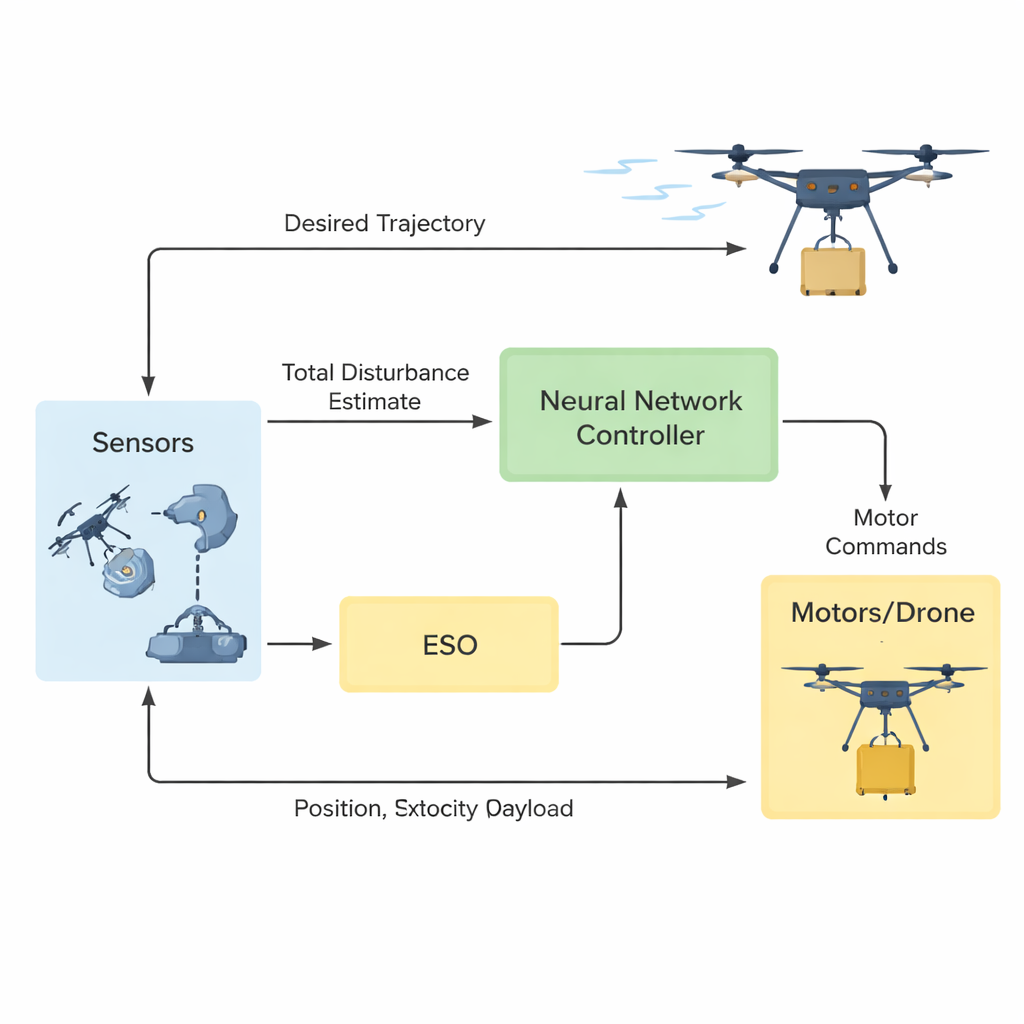
Para enfrentar isso, os autores partem de um conceito chamado rejeição ativa de distúrbios. Em vez de tentar modelar cada detalhe do vento e da carga oscilante, eles tratam todas as influências desconhecidas de uma só vez como um único distúrbio “aglutinado”. Um observador de estado estendido especialmente projetado age como um cão de guarda matemático, inferindo constantemente esse distúrbio total a partir do movimento do drone. Notavelmente, o observador deles é ajustado com apenas um parâmetro principal, o que simplifica muito a configuração em comparação com muitos projetos existentes. A teoria mostra que, com ajuste adequado, a estimativa do observador sobre o distúrbio converge rapidamente e permanece estritamente limitada, o que significa que pode ser confiada como uma correção preditiva em tempo real, e não apenas como uma aproximação grosseira.
Deixar uma Rede Neural Aprender as Partes Difíceis
Mesmo com boas estimativas de distúrbio, o controlador ainda precisa saber como os motores do drone traduzem comandos em movimento real — uma relação que depende de massa, geometria e outros detalhes físicos que podem mudar ao longo do tempo. Em vez de depender de um modelo identificado meticulosamente, os autores introduzem uma rede neural de funções de base radial que aprende essa relação diretamente a partir dos sinais de voo. O controlador só precisa saber onde o drone está, para onde ele deve ir, e a segunda derivada da trajetória desejada (quão rapidamente o ponto alvo acelera). Uma lei adaptativa atualiza continuamente os pesos internos da rede neural para reduzir os erros de rastreamento. Usando análise baseada em Lyapunov, os autores provam que, sob esse esquema adaptativo, os erros de rastreamento permanecem uniformemente limitados e podem ser reduzidos arbitrariamente, enquanto as atualizações de peso permanecem estáveis.
Testando o Método
A equipe valida sua abordagem por meio de simulações computacionais e experimentos no mundo real. Nas simulações, o drone é solicitado a seguir trajetórias espirais tridimensionais desafiadoras enquanto é atingido por rajadas de vento aleatórias e forças de carga que mudam ao longo do tempo. O novo controlador é comparado com três outros métodos avançados: rejeição ativa de distúrbio linear, controle por sliding‑mode, controle terminal sliding‑mode sem modelo, e, em um teste mais difícil, controle adaptativo de ordem fracionária. Em múltiplos cenários, o método proposto alcança trajetórias mais suaves e erros quadráticos médios de posição menores, especialmente após a introdução dos distúrbios. Em testes físicos, os pesquisadores pilotam um quadrotor em ambiente interno enquanto dois ventiladores industriais sopram ar sobre ele e uma garrafa d’água de 200 gramas fica pendurada abaixo. Câmeras de captura de movimento registram a posição do drone. Mesmo sob vento contínuo e puxões manuais na carga, o drone mantém seu ponto alvo dentro de poucos centímetros e os comandos dos motores permanecem bem comportados, sugerindo que o método é prático para hardware real.
O Que Isso Significa para o Uso Cotidiano de Drones
Para leigos, a principal conclusão é que este trabalho oferece uma forma de tornar drones mais confiáveis em condições adversas sem exigir conhecimento perfeito de sua física interna. Ao combinar um observador de distúrbio simples porém poderoso com um controlador baseado em aprendizado, o sistema pode se adaptar em tempo real a rajadas de vento e cargas oscilantes, mantendo o drone na rota com esforço mínimo de ajuste. Esse tipo de controle robusto e com pouco dependência de modelo pode facilitar a implantação de drones em tarefas rotineiras em cidades, fazendas e fábricas, e as mesmas ideias podem, eventualmente, ser estendidas a equipes de drones e a projetos tolerantes a falhas que mantenham o voo seguro mesmo quando alguns componentes falham.
Citação: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Palavras-chave: controle de quadrotor, estabilidade de drone, distúrbio de vento, controlador por rede neural, rastreamento de carga