Clear Sky Science · pt
O branqueamento PCA melhora a tolerância à iluminação no reconhecimento visual de lugares com assinaturas de Fourier
Robôs encontrando o caminho em ambientes internos
Imagine um robô se deslocando por uma casa ou escritório que tem luz solar forte em um dia e lâmpadas fracas no seguinte. Para saber onde está, o robô compara o que sua câmera vê agora com fotos armazenadas anteriormente. Mas quando a iluminação muda drasticamente, os lugares podem ficar quase irreconhecíveis. Este artigo explora uma abordagem enxuta, baseada em matemática, para robôs reconhecerem lugares a partir de imagens panorâmicas, e mostra como um truque estatístico chamado branqueamento PCA torna esse método muito mais tolerante a variações de iluminação.
Ver o mundo como ondas, não pixels
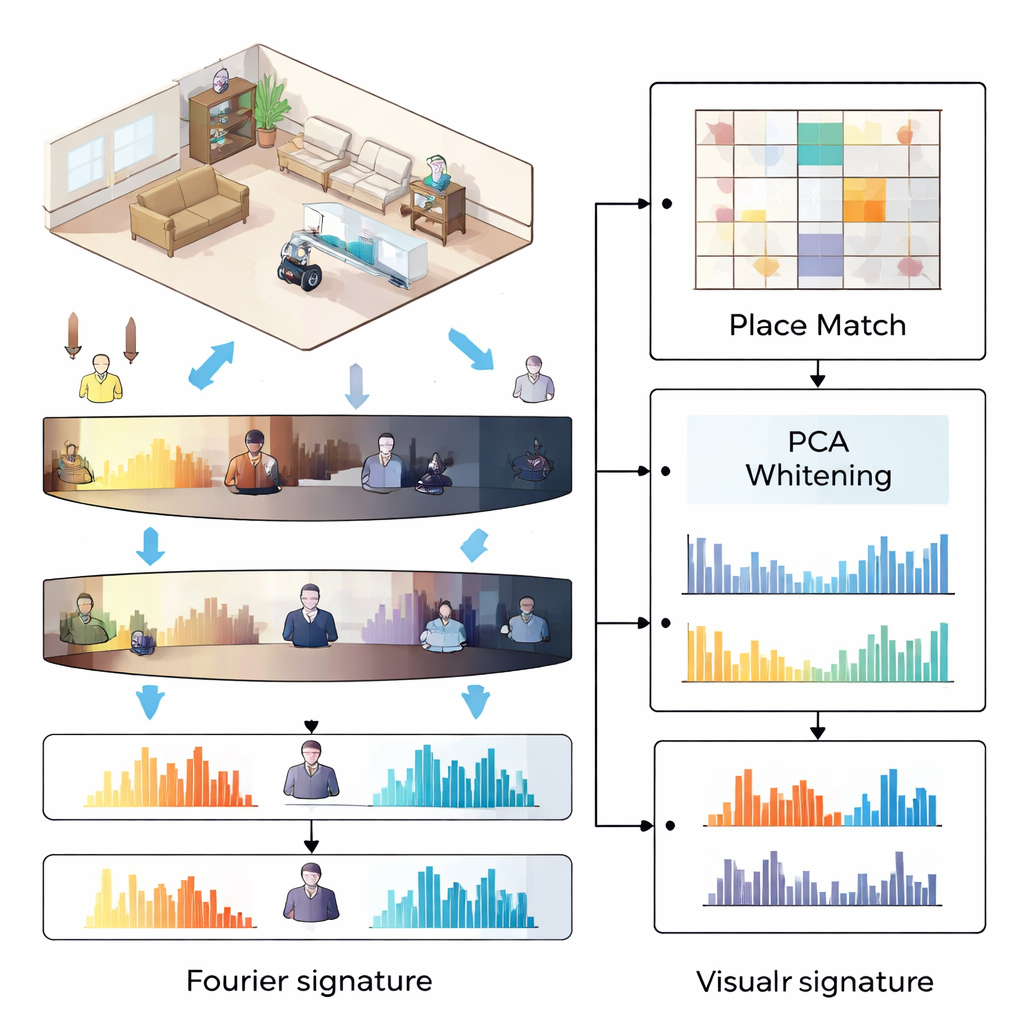
A maioria dos sistemas modernos de reconhecimento visual de lugares usa muitos detalhes pequenos numa imagem — bordas, cantos e texturas — e então os combina em uma “impressão digital” compacta. Em contraste, este trabalho baseia-se em assinaturas de Fourier, que tratam uma imagem panorâmica não como uma grade de pixels, mas como uma mistura de ondas de diferentes frequências. A câmera captura uma visão de 360 graus; essa panorâmica é dividida em faixas horizontais, e cada faixa é convertida em um espectro de frequência unidimensional. Apenas as amplitudes das frequências mais baixas são mantidas e empilhadas em um descritor. Como o método descarta informações sobre onde as características aparecem ao longo do círculo, o descritor muda pouco quando o robô simplesmente gira, tornando-o naturalmente robusto à rotação.
Por que a iluminação prejudica assinaturas simples
Mesmo sendo compactas e rápidas de calcular, as assinaturas de Fourier ainda têm dificuldade quando a iluminação varia muito entre gravações do mesmo local. Imagens naturais tendem a ter muito mais energia em baixas frequências do que em altas, e esse desequilíbrio é afetado pela iluminação. Como resultado, algumas partes do descritor dominam a medida de similaridade, e muitas entradas ficam fortemente correlacionadas entre si porque linhas vizinhas na panorâmica se parecem. Sem correção, a decisão do sistema sobre se duas imagens mostram o mesmo lugar é guiada por um pequeno subconjunto redundante de valores, tornando-o frágil sob condições de iluminação diferentes.
Purificando o sinal com branqueamento PCA
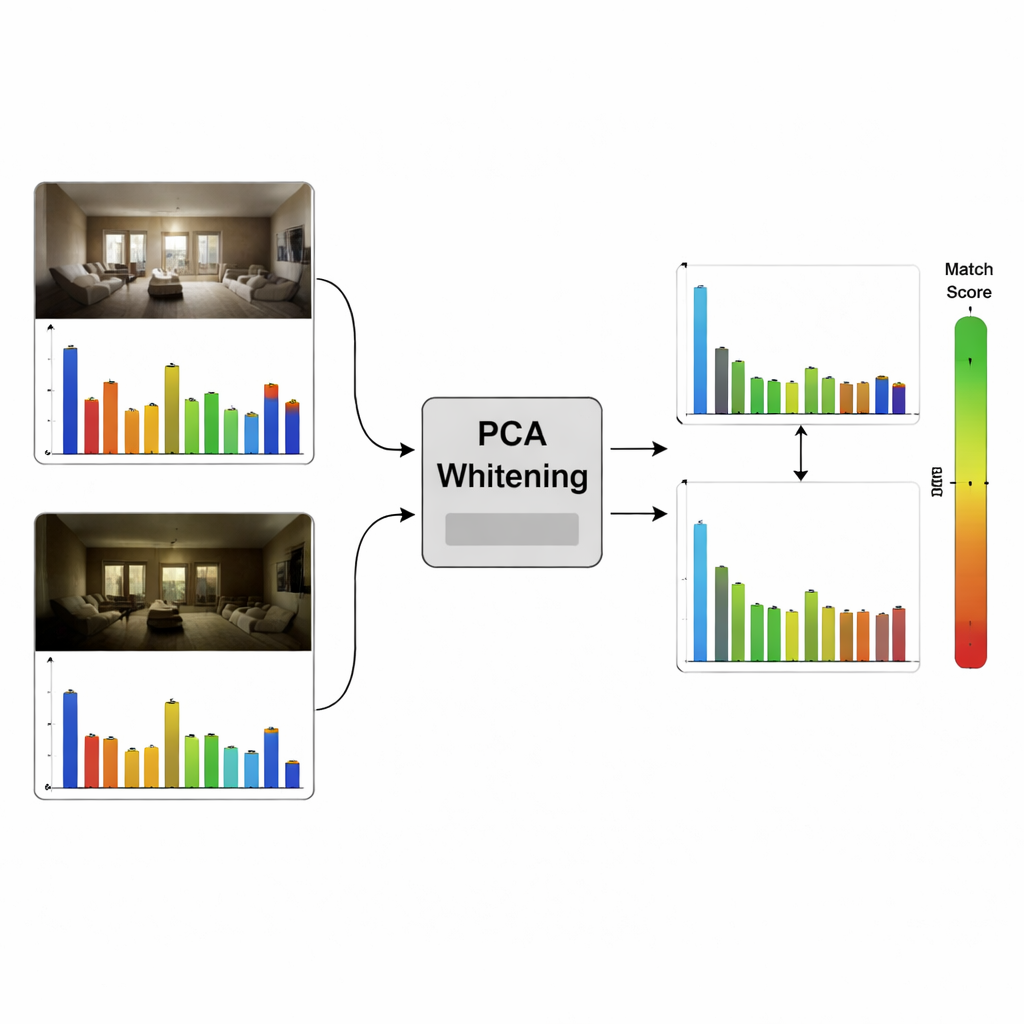
O autor propõe adicionar o branqueamento PCA como uma etapa de pós-processamento aos descritores de Fourier. Usando uma coleção de panorâmicas de treinamento de sete ambientes internos, o sistema aprende como as entradas do descritor tendem a variar e se correlacionar. O branqueamento PCA então recentraliza o descritor, o rotaciona para direções de variação independente e reescala cada direção para que todas tenham influência igual. Isso remove correlações redundantes e equilibra a contribuição das diferentes frequências. Como as entradas transformadas são ordenadas por importância, o descritor também pode ser reduzido com segurança simplesmente cortando a cauda. Experimentos em três ambientes não vistos com múltiplas variantes de iluminação mostram que o branqueamento aumenta consistentemente a probabilidade de o lugar correto aparecer entre os principais candidatos recuperados, especialmente no caso praticamente importante de retornar apenas uma pequena lista de correspondências prováveis.
Leve, mas competitivo com aprendizado profundo
Para avaliar como essa abordagem enxuta se compara às tendências atuais, o artigo a confronta com o AnyLoc, um método recente de reconhecimento visual de lugares baseado em uma grande rede transformadora de visão. O AnyLoc também usa compressão baseada em PCA, mas parte de características de alta dimensão produzidas por aprendizado profundo. No conjunto de dados panorâmico interno, as assinaturas de Fourier branqueadas igualam ou até superam o AnyLoc quando o sistema pode propor até cerca de dez imagens candidatas, o que é um ponto de operação realista para muitos robôs. Crucialmente, o método baseado em Fourier é muito mais barato de executar: depende de transformadas rápidas de Fourier e operações matriciais simples na CPU, enquanto o AnyLoc precisa de uma GPU potente e muito mais tempo por imagem.
O que isso significa para robôs do dia a dia
Para um leitor leigo, a mensagem central é que o uso inteligente de matemática clássica ainda pode rivalizar com inteligência artificial pesada em certas tarefas. Ao transformar imagens panorâmicas em descritores balanceados e decorrelacionados, o branqueamento PCA torna um método simples de reconhecimento de lugares baseado em frequência muito mais resistente a mudanças de iluminação. Robôs que usam essa abordagem podem se localizar com confiabilidade em casas e escritórios sob uma ampla gama de condições de iluminação, usando recursos computacionais modestos. Isso torna a navegação visual robusta mais acessível para robôs menores e mais baratos que um dia podem compartilhar nossos espaços cotidianos.
Citação: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Palavras-chave: reconhecimento visual de lugares, robôs móveis, imagens panorâmicas, assinaturas de Fourier, branqueamento PCA