Clear Sky Science · pt
Pure pursuit aprimorado com controle dinâmico de esterçamento para robôs móveis autônomos e aplicação à navegação segura em plantas químicas
Robôs que Permanecem na Rota
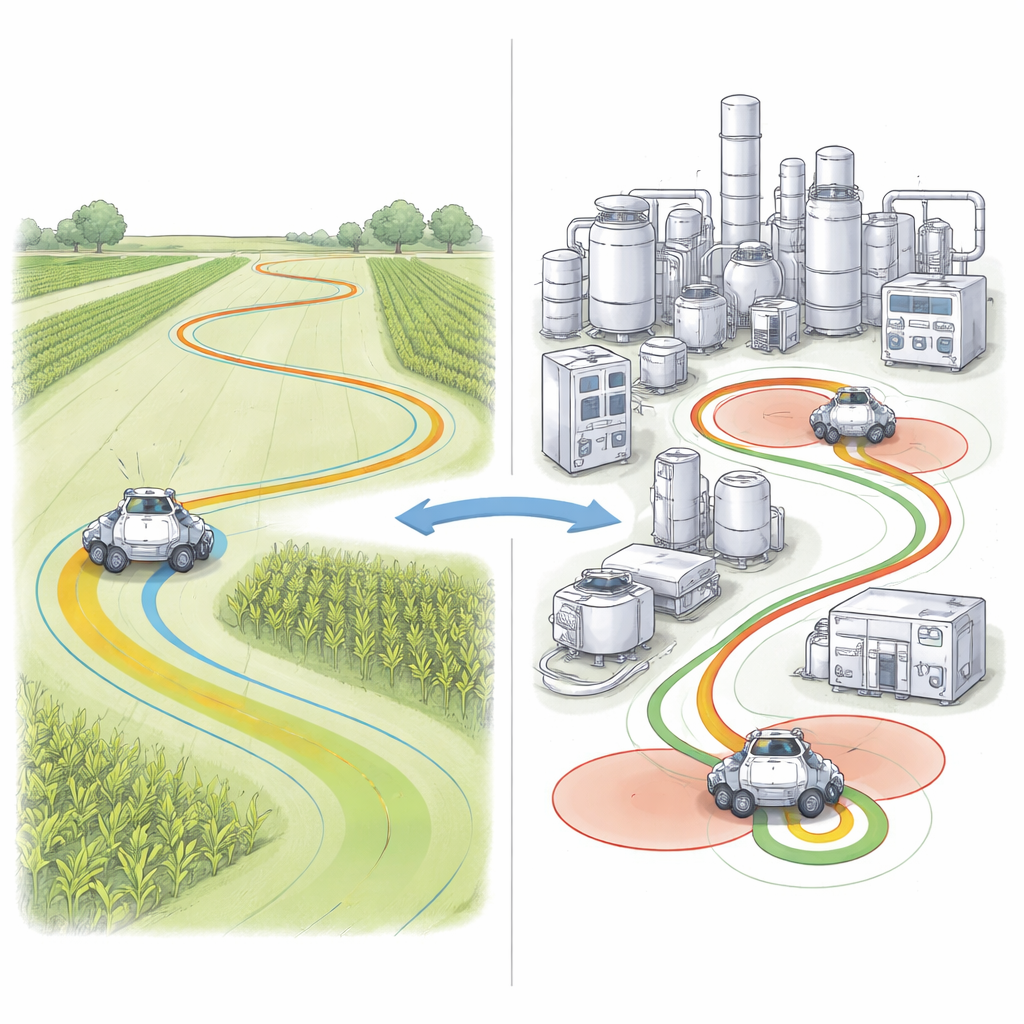
À medida que os robôs saem de galpões industriais limpos e chegam a campos agrícolas e plantas químicas, eles precisam seguir trajetórias estreitas com grande precisão. Uma pequena oscilação pode esmagar plantações, bater em tubulações ou rolar para uma área com gases inflamáveis. Este artigo descreve um novo modo para robôs com rodas esterçarem e controlarem sua velocidade de forma a permanecerem próximos da rota planejada, tanto em espaços amplos quanto em áreas industriais apertadas.
Por que Guiar um Robô é Difícil
Muitos robôs móveis autônomos hoje usam uma regra simples chamada “pure pursuit” para seguir um caminho. O robô olha uma curta distância à frente ao longo da rota, aponta na direção desse ponto e repete esse processo rapidamente. Na prática, os engenheiros precisam decidir quão à frente o robô “olha” e quão rápido ele se move. Se a distância de lookahead for muito curta, o robô reage de forma nervosa e pode zigzaguear de um lado para o outro. Se for muito longa, ele reage lentamente e corta curvas, especialmente em curvas fechadas ou em velocidades maiores. Ao ar livre, surge outra complicação: a posição do robô é estimada combinando sinais de satélite, sensores de movimento e dados de rotação das rodas, cada um com seus próprios erros e atrasos.
Uma Maneira mais Inteligente de Esterçar e Ajustar Velocidade
Os autores propõem um método aprimorado chamado Pure Pursuit com Controle Dinâmico de Esterçamento (PP-DSC). Em vez de manter a distância de lookahead e a velocidade fixas, o robô ajusta ambos em tempo real com base em quão acentuada é a curva. Quando o ângulo de esterçamento é pequeno e o caminho está quase reto, o robô usa um lookahead maior e maior velocidade para um deslocamento suave e eficiente. À medida que o ângulo de esterçamento aumenta nas curvas, a distância de lookahead diminui e a velocidade reduz automaticamente, dando mais tempo de resposta e reduzindo o deslizamento lateral. Esse comportamento foi implementado em um robô de quatro rodas, tipo carro, que utiliza um moderno framework de software robótico junto com posicionamento por satélite de alta precisão, um sensor inercial e codificadores nas rodas para estimar seu movimento.

Testes em Campos e Plantas Químicas Virtuais
Para avaliar o desempenho do PP-DSC, a equipe realizou experimentos ao ar livre em três trajetórias básicas: uma linha reta, um laço e um oito, em velocidades de 1 a 5 metros por segundo. Compararam o novo método com a abordagem padrão de pure pursuit. O controlador aprimorado manteve o robô muito mais próximo da trajetória pretendida em todos os casos. Em linhas retas, o erro lateral médio caiu para cerca de cinco centímetros, e em trajetórias curvas o erro manteve-se abaixo de oito centímetros. Em contraste, o método tradicional podia derivar dezenas de centímetros e mostrava picos maiores ao entrar ou sair de curvas, especialmente em velocidades mais altas.
Adicionando Segurança em Zonas de Risco
Os pesquisadores também investigaram como esse robô poderia se comportar dentro de uma planta química, onde poderia inspecionar reatores quentes ou transportar amostras. Em vez de construir um testbed industrial completo, utilizaram um modelo computacional detalhado de uma planta biodiesel que incluía posições de equipamentos e zonas com maior risco de incêndio e explosão. Estenderam seu controlador com um fator de segurança que reduz automaticamente a velocidade do robô quando ele entra nessas zonas de risco, com base em um índice padrão de incêndio e explosão usado em segurança de processo. As simulações mostraram que essa versão com consciência de segurança do PP-DSC aumentou o erro de seguimento apenas ligeiramente—menos de um por cento em média—enquanto garantia que o robô reduzisse a velocidade ao redor de equipamentos perigosos.
Escolhendo a Ferramenta Certa para Cada Tarefa
Uma conclusão interessante é que nenhuma estratégia de esterçamento é a melhor em todas as situações. Em campos abertos com curvas suaves, o método dinâmico claramente superou a abordagem tradicional, mantendo a trajetória do robô precisa e suave mesmo em velocidades maiores. Na geometria apertada de uma planta química, porém, o pure pursuit simples com lookahead fixo às vezes teve desempenho melhor, especialmente em laços fechados e rotas em “oito” que se cruzam, onde o lookahead dinâmico poderia, acidentalmente, deslocar o robô para o ramal errado do caminho. Os autores concluem que os robôs devem alternar entre estratégias dependendo da forma da trajetória: usar o controlador aprimorado e integrado à segurança para curvas moderadas e trajetos sensíveis a riscos, e recorrer ao esquema de lookahead fixo para percursos muito apertados ou com laços. Para não especialistas, a mensagem-chave é que a navegação robótica segura e confiável em plantas e campos do mundo real não depende apenas de bons mapas e sensores—como o robô escolhe onde olhar e quão rápido ir é igualmente importante.
Citação: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Palavras-chave: robôs móveis autônomos, seguimento de trajetória, controle de esterçamento, navegação GNSS-RTK, segurança em plantas químicas