Clear Sky Science · pt
Detecção leve de alvos e rastreamento múltiplo para inspeção por VANTs em minas a céu aberto
Olhos mais inteligentes no céu
Minas a céu aberto são lugares vastos e severos onde caminhões pesados, escavadeiras e pessoas se movimentam constantemente. Manter tudo seguro e funcionando normalmente costuma exigir muitos trabalhadores no solo e equipamentos de posicionamento caros, e ainda assim pequenas falhas e intrusos podem passar despercebidos. Este artigo explora como drones inteligentes e leves podem patrulhar essas minas de cima, detectando automaticamente equipamentos, pessoas e problemas em tempo real, ao mesmo tempo em que operam dentro dos limites estreitos de computação dos eletrônicos embarcados.
Por que as minas precisam de vigilantes melhores
Minas modernas já dependem de ferramentas como posicionamento por satélite e balizas de rádio especiais para rastrear caminhões e máquinas. Mas esses sistemas “ativos” têm pontos cegos: sinais podem ser bloqueados por paredes íngremes, poeira ou interferência, e só funcionam em veículos e pessoas que carregam os dispositivos adequados. Eles também não mostram como uma falha realmente se parece. Drones, por outro lado, podem voar sobre terrenos difíceis, capturar imagens e vídeos ricos e seguir alvos não cooperativos, como veículos invasores. O desafio é que algoritmos de visão potentes normalmente exigem computadores pesados, enquanto drones têm limitação de peso, energia e capacidade de processamento. Os autores se propõem a projetar um sistema de detecção e rastreamento que seja preciso e suficientemente leve para rodar diretamente em um drone.
Ensinando drones a ver alvos pequenos e ocultos
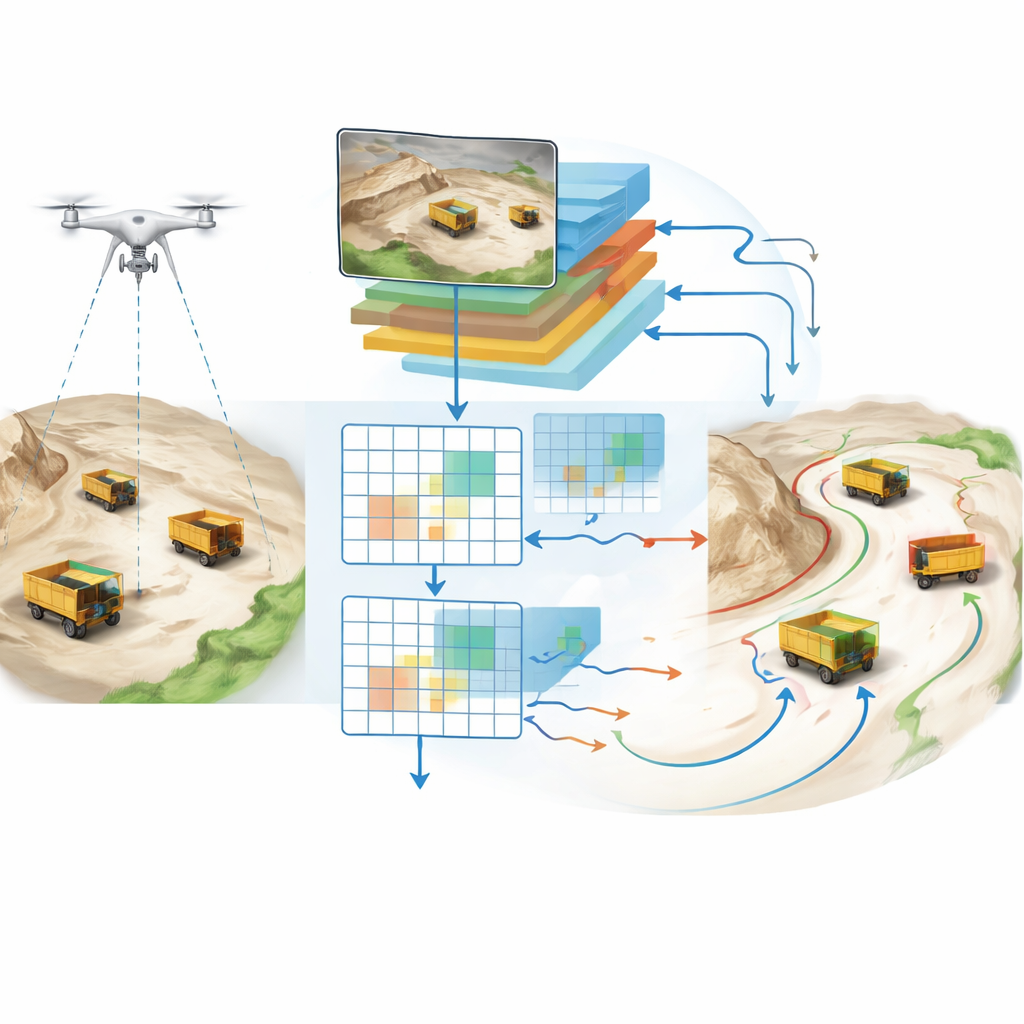
No cerne do trabalho está uma versão aprimorada de um modelo de visão popular chamado YOLO, afinada especificamente para minas a céu aberto. Os pesquisadores remodelam a “espinha” do modelo para que ele consiga acompanhar os contornos irregulares de caminhões, escavadeiras e pilhas de rocha, em vez de depender de filtros rígidos e em grade. Eles também redesenham a parte da rede que combina informações de escalas de imagem grosseiras e finas, para que máquinas pequenas e distantes e outras maiores e próximas sejam capturadas em conjunto sem confusão. Sobre isso, um novo módulo de decisão leve foca a atenção nos detalhes mais informativos da cena, ajudando o sistema a distinguir pequenos pontos de falha e máquinas parcialmente ocultas do fundo confuso.
Fazendo modelos potentes caberem em um drone
Mesmo com essas melhorias, um modelo de visão pode facilmente ficar grande demais para o hardware de um drone. Para resolver isso, a equipe aplica uma estratégia cuidadosa de poda que analisa quais conexões internas mais contribuem para o desempenho e então remove o restante. Esse processo reduz o número de parâmetros e a quantidade de computação ao preservar os caminhos mais fortes na rede. Em um nível de poda ótimo, o sistema mantém alta precisão de detecção enquanto reduz tamanho do modelo, operações e tempo de resposta o suficiente para rodar em um processador embarcado compacto, consumindo menos energia e estendendo o tempo de voo. Testes em um conjunto de dados personalizado de mina e em um benchmark público para drones mostram que o modelo podado supera várias alternativas conhecidas, especialmente para alvos pequenos e parcialmente ocultos.
De instantâneos a rastros suaves
Detectar objetos em uma imagem é apenas metade da história; as minas também precisam saber como cada caminhão ou pessoa se movimenta ao longo do tempo. Para isso, os autores aprimoram uma abordagem existente de rastreamento multiobjetos para lidar melhor com cenas lotadas, veículos parecidos e mudanças súbitas de movimento. Eles criam uma medida de similaridade combinada que considera onde o alvo está, sua aparência e até se parece carregado ou vazio. Também corrigem as previsões de movimento para levar em conta acelerações variáveis, como quando um caminhão faz uma curva ou sobe uma rampa. Juntos, esses passos reduzem trocas de identidade — quando um veículo é confundido com outro — e mantêm os rastros suaves e confiáveis, tudo isso permanecendo rápido o suficiente para uso em tempo real em hardware de nível de drone.
Rumo a patrulhas de mina não tripuladas e permanentes
Finalmente, os autores inserem seus módulos de visão e rastreamento dentro de um sistema de inspeção multinível que pode coordenar vários drones, transmitir dados via 5G e enlaces ad-hoc e fornecer resultados ao controle em terra. Em experimentos em minas reais, essa configuração melhora acentuadamente a precisão e a estabilidade do monitoramento de equipamentos em comparação com métodos tradicionais. Para não especialistas, a conclusão principal é que o estudo mostra um caminho prático para ter pequenos robôs voadores eficientes vigiando continuamente grandes instalações industriais, detectando pequenas falhas, visitantes não registrados e situações de risco antes que se agravem — sem precisar de computadores volumosos ou de redes densas de balizas em cada veículo.
Citação: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Palavras-chave: inspeção por drone, mineração a céu aberto, detecção de objetos, rastreamento multiobjetos, modelos de IA leves