Clear Sky Science · pt
Uma interface cérebro-máquina intracortical baseada na atividade do premotor ventral de macacos
Ensinando o Cérebro a Mover um Cursor
Imagine guiar um cursor de computador ou um braço robótico usando apenas seus pensamentos, mesmo que seus músculos não consigam mais se mover. Interfaces cérebro–máquina (ICMs) buscam tornar isso possível traduzindo a atividade cerebral em comandos para dispositivos externos. A maioria dos sistemas até agora tem explorado uma área principal de movimento do cérebro, mas o que acontece se essa região estiver danificada, como em acidente vascular cerebral ou esclerose lateral amiotrófica (ELA)? Este estudo pergunta se outra área próxima, geralmente associada ao planejamento de ações manuais e à observação de movimentos alheios, também pode conduzir de forma confiável uma ICM.
Uma Nova Área Cerebral Entra na Equipe
ICMs clássicas leem principalmente sinais do córtex motor primário, a faixa de tecido cerebral que controla diretamente movimentos voluntários, e de uma região vizinha de planejamento chamada córtex premotor dorsal. Os pesquisadores voltaram sua atenção para outro vizinho: o córtex premotor ventral, especificamente uma zona chamada F5c. Em macacos, F5c é rica em células que disparam quando o animal alcança e agarra objetos e até quando simplesmente observa ações em uma tela. Essa mistura de respostas a movimento e observação sugeriu que F5c poderia ser adequada para controlar um cursor ou um “avatar” robótico sem exigir o movimento do corpo.
Macacos, Microeletrodos e Alvos em Movimento
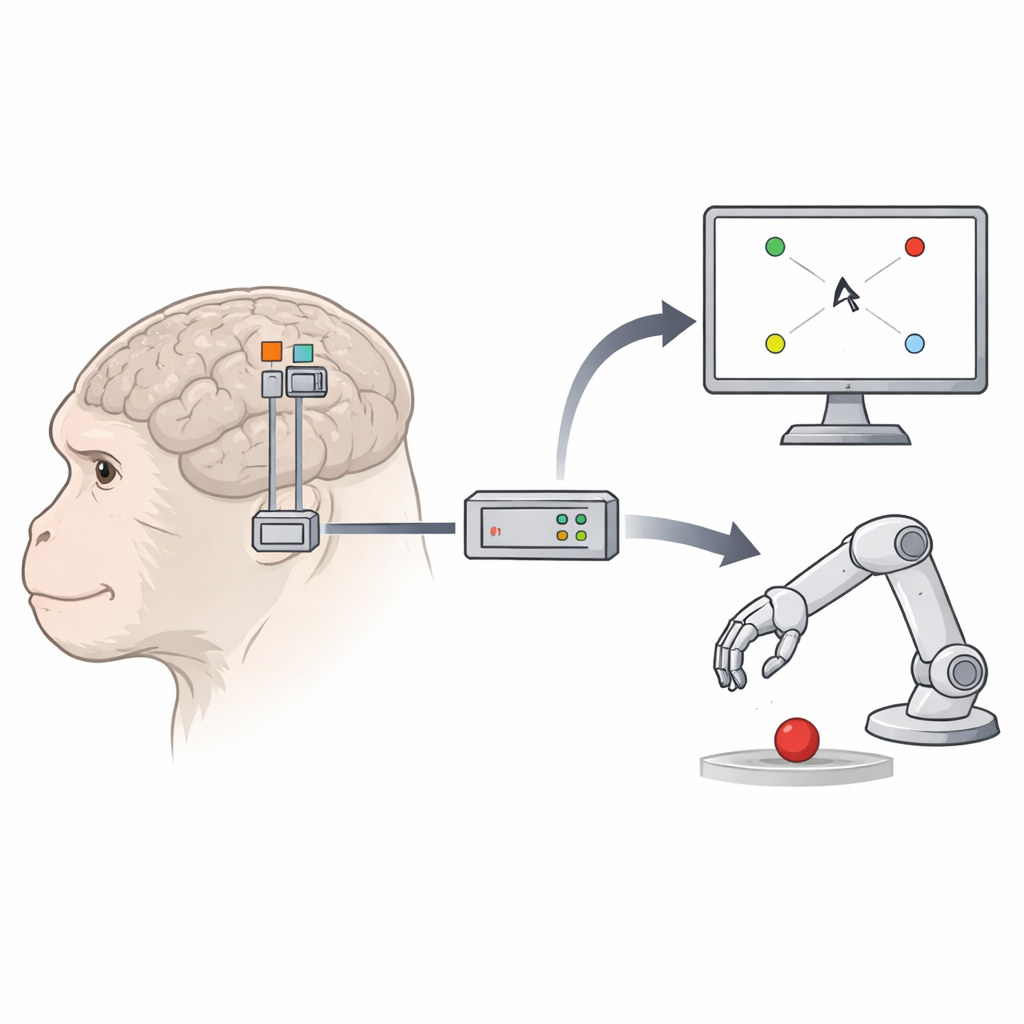
Dois macacos rhesus foram implantados com delicadas grades de 96 eletrodos em três pontos: córtex motor primário, córtex premotor dorsal e F5c. Em sessões diárias, os animais realizaram várias tarefas visualmente simples, mas comportamentalmente exigentes. Em uma tarefa, eles tocavam o centro de uma tela e então alcançavam um de oito alvos periféricos, enquanto um pequeno cursor na tela se movia do centro para o mesmo alvo. Em uma segunda tarefa, mantinham a mão imóvel e simplesmente assistiam o cursor ir até os alvos. Em uma terceira configuração, mais realística, o cursor foi substituído por um braço robótico 3D avatar alcançando alvos em uma cena virtual. Ao longo dessas tarefas, a equipe pôde comparar quão bem cada área cerebral conduzia os movimentos do cursor ou do avatar.
Como Sinais Cerebrais Viraram Movimento Suave
Durante uma fase de treinamento, o cursor ou avatar seguia trajetórias geradas por computador, suavemente curvas, enquanto os macacos ou se moviam ou observavam. Ao mesmo tempo, os eletrodos registravam explosões rápidas de atividade cerebral. Os pesquisadores então treinaram um decodificador — uma ferramenta matemática que aprende a mapear padrões de disparo neural para as velocidades do cursor ou avatar na tela. Para capturar apenas os canais mais informativos, eles escolheram eletrodos cuja atividade acompanhava a direção e a velocidade do movimento. Usaram um método que isola padrões cerebrais mais estreitamente ligados ao comportamento e o aprimoraram com uma etapa não linear, permitindo ao sistema captar relacionamentos mais complexos entre atividade neural e movimento. Na fase de decodificação, o computador deixou de dirigir o cursor ou avatar; em vez disso, o decodificador usou sinais cerebrais ao vivo, atualizados a cada 50 milissegundos, para guiar o movimento na tela. O decodificador era periodicamente re-treinado em segundo plano para poder se adaptar conforme as respostas neurais mudavam ao longo do tempo.

Quão Bem a Área “Nova” Desempenhou?
A questão chave era se F5c poderia igualar ou chegar perto do desempenho das áreas de controle tradicionais. Em ambos os macacos, a decodificação baseada em F5c inicialmente ficou atrás ao mover o cursor, especialmente quando os animais apenas observavam e não moviam a própria mão. Mas à medida que as sessões progrediam — e conforme mais eletrodos forneceram sinais confiáveis relacionados ao movimento — F5c alcançou as demais. Em várias condições, seu desempenho igualou o do córtex motor primário e até o superou em sessões posteriores para controle passivo do cursor. Ao controlar o avatar robótico, o sucesso geral foi menor em todas as áreas, mas F5c ainda apoiou um controle significativo, especialmente quando combinado com um algoritmo assistivo leve que guiava sutilmente o avatar em direção ao alvo. Importante, neurônios nas três regiões mostraram padrões semelhantes de sintonia direcional e atividade populacional durante a fase de treinamento dirigida por computador e na fase de controle ativo, com apenas um subconjunto mudando suas direções preferenciais conforme os macacos aprenderam a conduzir a ICM.
O Que Isso Significa para a Neurotecnologia Futura
Para um público não especialista, a conclusão crucial é que a área premotora ventral F5c — antes vista principalmente como planejadora e observadora de ações — também pode servir como um núcleo de controle prático para interfaces cérebro–máquina. Quando há sinais relacionados ao movimento suficientes, decodificadores treinados com atividade de F5c podem guiar um cursor de tela ou um robô assistivo quase tão bem quanto os baseados na área clássica de movimento. Isso sugere que futuras ICMs clínicas podem não precisar depender de uma única região cortical. Para pessoas cujo córtex motor primário está lesionado, regiões de planejamento vizinhas como o córtex premotor ventral podem fornecer um caminho alternativo para recuperar o controle sobre ferramentas digitais, dispositivos protéticos ou auxílios de mobilidade.
Citação: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Palavras-chave: interface cérebro-máquina, córtex motor, córtex premotor, decodificação neural, controle de prótese