Clear Sky Science · pt
Um sistema fuzzy tipo 3 baseado em estrutura virtual para detecção, compensação e controle preditivo de falhas em sensores e atuadores em sistemas não lineares
Manter máquinas nos trilhos quando peças falham
Tecnologias modernas — desde braços robóticos em fábricas até plantas químicas regulando acidez — dependem de sensores e atuadores que mantêm tudo funcionando discretamente. Mas quando essas peças derivam, enroscam ou falham, um sistema pode se tornar inseguro muito antes de alguém perceber. Este artigo apresenta uma nova forma de permitir que máquinas percebam e corrijam esses problemas por conta própria, mesmo quando os engenheiros não dispõem de um modelo matemático preciso do comportamento interno do sistema.
Por que problemas ocultos são tão difíceis de detectar
Em muitos cenários reais, o comportamento de um sistema é fortemente não linear: pequenas mudanças na entrada podem provocar variações grandes e inesperadas na saída. Métodos de controle tradicionais assumem que os projetistas conhecem as equações que regem esse comportamento e que sensores e atuadores funcionam conforme o esperado. Na prática, componentes envelhecem, ficam ruidosos ou são substituídos por hardware levemente diferente. Controladores tolerantes a falhas convencionais ou incorporam margens de segurança fixas (métodos passivos) ou dependem de modelos precisos para detectar e acomodar falhas (métodos ativos). Ambas as abordagens têm dificuldades quando o sistema muda ao longo do tempo ou quando seu funcionamento interno não é totalmente conhecido. Os autores argumentam que a indústria precisa de controladores que aprendam com dados em tempo real, reconheçam quando sensores ou atuadores se comportam mal e corrijam essas falhas em tempo real sem exigir um projeto detalhado do sistema.
Um controlador que aprende tratando o sistema como caixa-preta
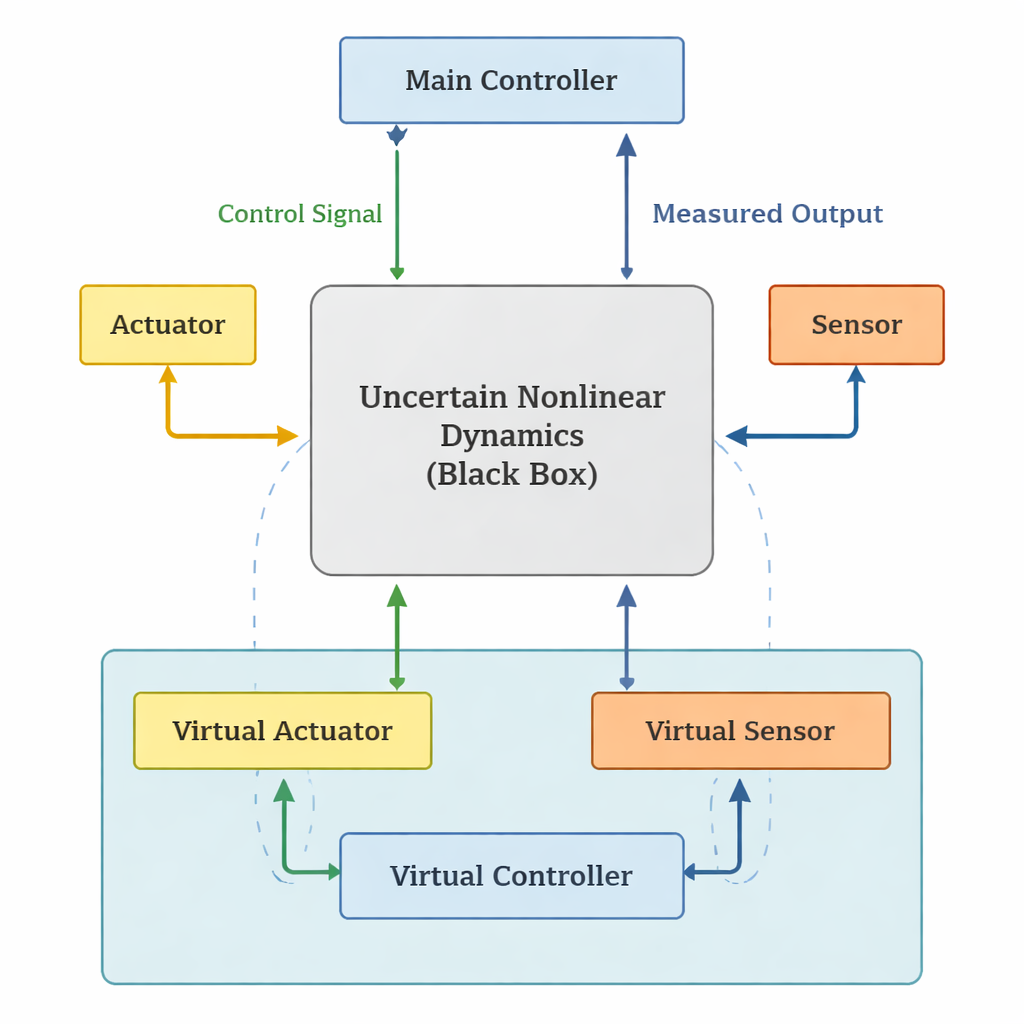
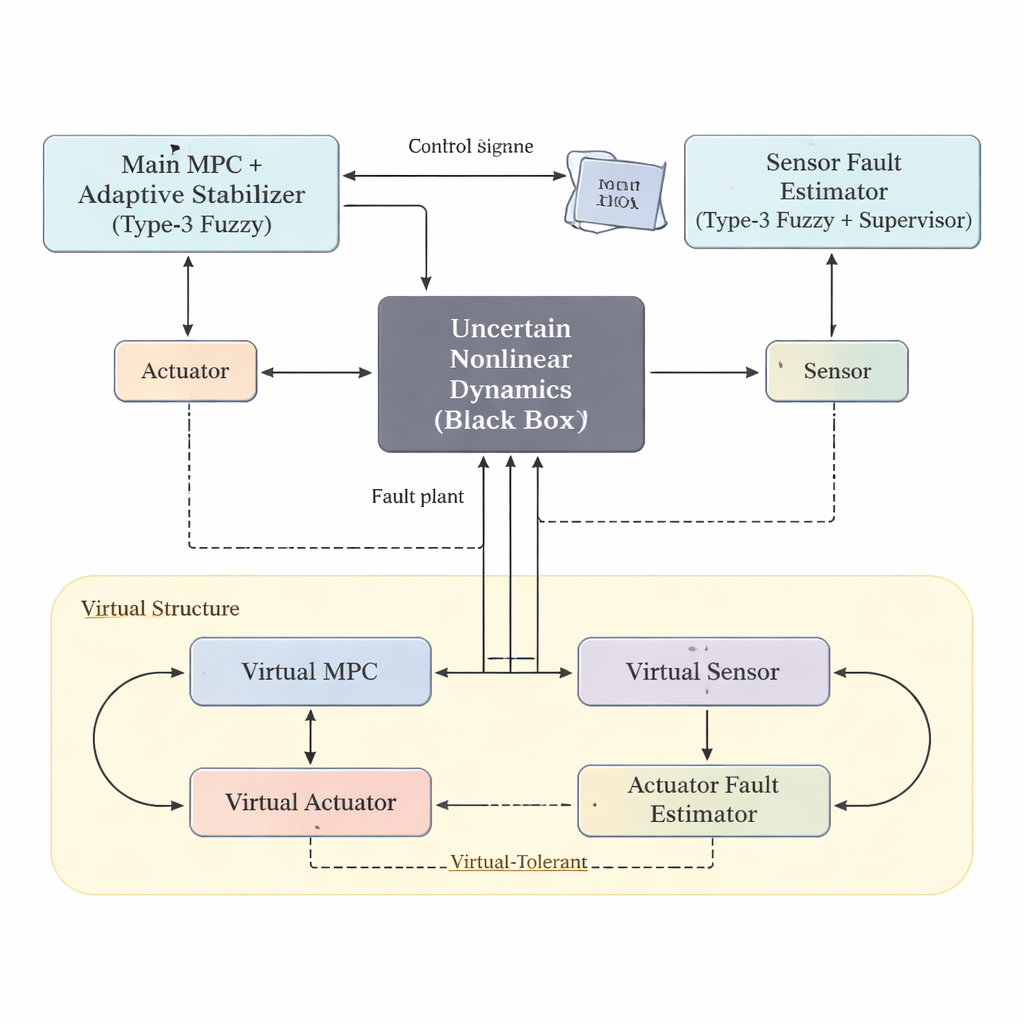
O quadro proposto vê a planta puramente como uma caixa-preta: observa apenas os sinais de controle enviados e as saídas medidas pelos sensores. Em seu núcleo está um sistema de lógica fuzzy tipo 3, uma forma avançada de modelagem fuzzy projetada para lidar com forte incerteza e ruído de medição. Esse sistema fuzzy aprende online uma descrição compacta entrada–saída da dinâmica desconhecida, enquanto um controlador preditivo baseado em modelo (MPC) usa esse modelo aprendido para planejar movimentos de controle futuros ao longo de um horizonte curto. Uma unidade adaptativa de estabilização roda em paralelo, garantindo que, mesmo que o modelo seja imperfeito ou os parâmetros derivem, o realimentação combinada mantenha os erros de rastreamento limitados e eventualmente levados em direção a zero.
Vigiando os vigilantes: detectando falhas em sensores e atuadores
O framework divide o tratamento de falhas em duas partes coordenadas. Primeiro, uma unidade de falha de sensor usa dois estimadores fuzzy tipo 3 adicionais mais um bloco supervisor para inferir quanto a leitura de um sensor se desviou de seu valor de regime esperado. A partir disso, gera um sinal corretivo que efetivamente “contracurva” a medição defeituosa para que o controlador principal continue a ver uma saída confiável. Em segundo lugar, o método constrói uma estrutura virtual que espelha o sistema real: inclui um sensor virtual, um atuador virtual, seu próprio identificador fuzzy e um MPC virtual. Como o laço virtual não sofre a degradação do atuador real, as diferenças entre os caminhos de controle virtual e real revelam o quanto o atuador verdadeiro está falhando. Uma fórmula simples transforma essa lacuna em um nível de falha estimado, que é então compensado no sinal de controle principal.
Provando estabilidade e testando em robôs e tanques químicos
Para mostrar que a abordagem não é apenas intuitiva, mas também matematicamente sólida, os autores constroem uma função de Lyapunov — uma espécie de medida de energia — que inclui erros de rastreamento, erros de modelagem e os parâmetros fuzzy ajustáveis. Eles derivam leis de atualização para os termos adaptativos de modo que essa energia sempre diminua, demonstrando que os erros encolhem ao longo do tempo mesmo com perturbações e falhas. Simulações então testam o método em dois exemplos muito diferentes: um braço robótico de um único elo e um processo de neutralização de pH em um tanque químico. Em ambos os casos, as dinâmicas verdadeiras são tratadas como totalmente desconhecidas, os parâmetros variam e falhas em sensores e atuadores são injetadas durante a operação. O controlador mantém um rastreamento preciso, aprende rapidamente a magnitude das falhas e mantém medidas de risco e erro baixas, superando controladores fuzzy mais simples e outros esquemas avançados tolerantes a falhas da literatura.
O que isso significa para sistemas reais
Para não especialistas, a mensagem principal é que esse método dá aos sistemas complexos uma espécie de autoconsciência embutida. Em vez de depender de um modelo perfeito ou de retunagem manual por engenheiros, o controlador aprende continuamente com os dados que observa, percebe quando sensores ou atuadores começam a mentir ou enfraquecer e corrige automaticamente suas ações para manter o desempenho estável. Como precisa apenas de dados de entrada e saída, pode, em princípio, ser aplicado a muitas máquinas diferentes sem redesenhar tudo do zero. Embora os resultados sejam baseados em simulações e questões de implementação em hardware ainda precisem ser exploradas, o trabalho aponta para robôs mais resilientes, processos industriais e outros sistemas autônomos que permanecem confiáveis mesmo quando seus componentes e ambientes estão longe do ideal.
Citação: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Palavras-chave: controle tolerante a falhas, lógica fuzzy, controle preditivo baseado em modelo, falhas em sensores e atuadores, sistemas não lineares