Clear Sky Science · pt
UncerTrans: transformador temporal ciente da incerteza para previsão antecipada de ações
Por que ver ações cedo pode nos manter seguros
Imagine um robô doméstico que consiga dizer, a partir do primeiro movimento de pulso, se alguém está prestes a despejar água quente com segurança em uma caneca ou acidentalmente derrubar a chaleira. Em fábricas, hospitais e casas inteligentes, máquinas cada vez mais dividem espaço com pessoas, e reagir apenas depois que um acidente começa é tarde demais. Este artigo apresenta o UncerTrans, um novo sistema de IA que não apenas prevê o que uma pessoa provavelmente fará com base no início de uma ação, mas também informa o quão certo está de sua própria estimativa — uma capacidade vital quando a segurança humana está em jogo.
De observar a prever ações humanas
A maioria dos sistemas atuais de visão computacional reconhece o que alguém está fazendo apenas quando a ação está quase terminada: eles classificam um clipe de vídeo completo como “cortando vegetais” ou “pegando uma xícara”. Isso é útil para análises posteriores, mas não para prevenir queimaduras, colisões ou quedas. A previsão antecipada de ações enfrenta um problema mais difícil: decidir qual ação completa está por vir ao ver apenas 10–20% dela. O desafio é que muitas ações parecem semelhantes no início — alcançar a chaleira pode significar servir uma bebida ou derrubá-la — então um sistema precisa operar com pouca informação e ainda evitar erros perigosos.
Ensinando a máquina a focar nos momentos certos
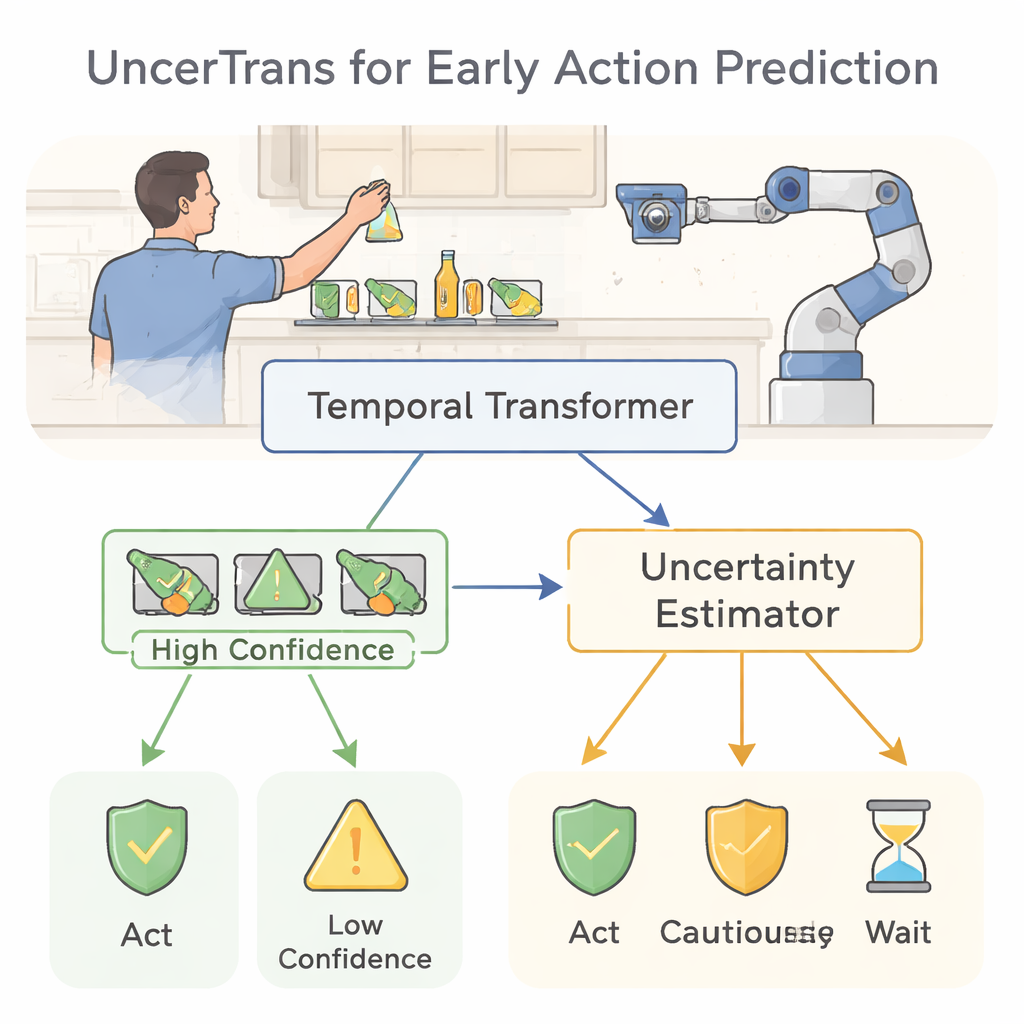
O UncerTrans aborda isso usando um transformador temporal, uma arquitetura de rede neural moderna originalmente desenvolvida para linguagem. Em vez de ler palavras em uma frase, ele observa pequenos trechos de vídeo ao longo do tempo. O modelo divide uma sequência inicial de ação em alguns segmentos e usa um mecanismo de atenção para decidir quais momentos importam mais. Quadros recentes recebem peso extra, ecoando nossa intuição de que o movimento mais recente geralmente revela a intenção mais clara. Esse projeto permite ao sistema captar tanto detalhes finos, como o movimento dos dedos, quanto padrões mais amplos, como a trajetória do braço, mesmo quando vê apenas uma fração da ação completa.
Fazer a máquina admitir quando está insegura
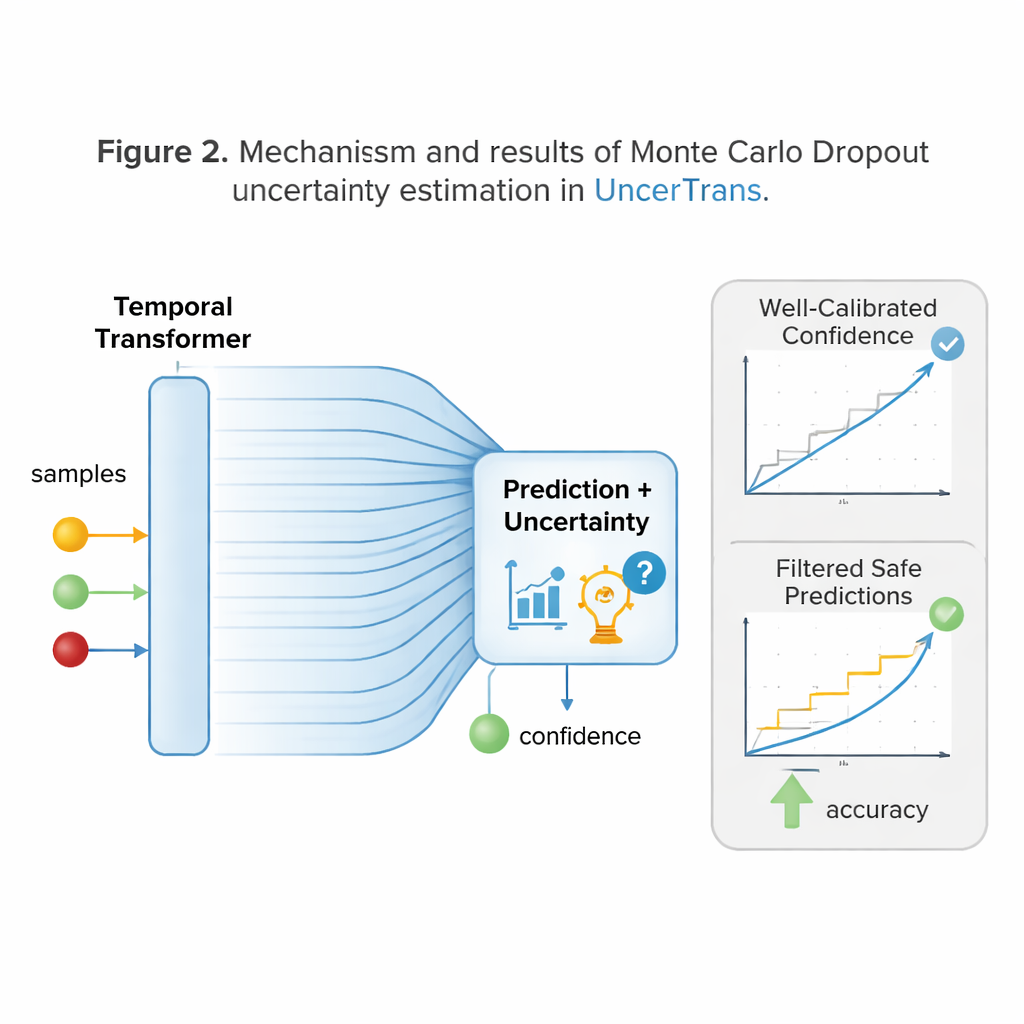
Uma inovação chave do UncerTrans é que ele não para em uma única resposta definitiva. Em vez disso, executa a mesma entrada pela rede várias vezes com pequenas variações usando uma técnica chamada dropout Monte Carlo. Cada execução desliga conexões internas diferentes de forma aleatória, produzindo uma previsão ligeiramente diferente. Ao observar quanto essas previsões discordam, o sistema pode estimar sua própria incerteza: previsões fortemente agrupadas sinalizam alta confiança, enquanto previsões dispersas indicam dúvida. O UncerTrans ainda separa a incerteza causada por experiência de treinamento limitada do ruído no próprio vídeo, e ajusta quantas execuções de teste realiza dinamicamente — usando mais quando as primeiras amostras parecem ambíguas e menos quando já concordam.
Transformando confiança em decisões mais seguras
Saber quando você pode estar errado só é útil se isso mudar seu comportamento. O UncerTrans converte suas estimativas de confiança em escolhas práticas. Para previsões com baixa incerteza, o sistema pode agir de forma decisiva — por exemplo, disparar um alerta ou mover um braço robótico para fora do caminho. Quando a incerteza é moderada, ele pode optar por comportamentos mais conservadores e seguros, como reduzir a velocidade do robô ou pedir mais informações. Se a incerteza for muito alta, pode recusar-se a decidir e simplesmente continuar observando. Testes em um grande conjunto de vídeos em primeira pessoa na cozinha mostram que o UncerTrans prevê ações futuras com mais precisão do que várias alternativas fortes, especialmente quando apenas os primeiros 10% de uma ação estão visíveis. Notavelmente, ao descartar apenas os 30% dos casos mais incertos, a precisão das previsões restantes sobe para cerca de 84%, demonstrando o valor real do filtro ciente da incerteza.
O que isso significa para o trabalho em equipe cotidiano entre humanos e robôs
Para um não-especialista, a mensagem é direta: o UncerTrans é um passo em direção a máquinas que não apenas adivinham nosso próximo movimento a partir de pistas limitadas, mas também sabem quando essas suposições são confiáveis. Ao combinar um modelo de visão sensível ao tempo com um “medidor de confiança” interno, o sistema pode reagir mais rápido e de forma mais segura em ambientes reais e desordenados, como cozinhas, fábricas e estabelecimentos de cuidado. Embora o método ainda carregue custos computacionais e exija refinamentos adicionais, oferece um roteiro promissor para futuros robôs e sistemas de monitoramento que antecipam perigos cedo, respondem com cautela quando incertos e, em última instância, se integram de forma mais segura aos espaços humanos.
Citação: Zhai, X., Liu, Y. UncerTrans: uncertainty-aware temporal transformer for early action prediction. Sci Rep 16, 7068 (2026). https://doi.org/10.1038/s41598-026-38107-4
Palavras-chave: previsão antecipada de ações, colaboração humano-robô, incerteza em IA, modelos de visão com transformers, sistemas inteligentes seguros