Clear Sky Science · pt
Pesquisa sobre método de posicionamento na triagem de encomendas em logística desordenada
Por que uma triagem de encomendas mais inteligente importa
Cada pedido online que você faz desencadeia um balé oculto de caixas em enormes centros logísticos. Antes que um pacote possa seguir rapidamente até sua porta, ele precisa ser encontrado, levantado, medido, escaneado e roteado—frequentemente a partir de uma pilha caótica de embalagens misturadas. Hoje, grande parte desse primeiro passo de “desempacotar o caos” ainda depende de trabalhadores humanos realizando tarefas repetitivas e exaustivas. Este artigo apresenta um novo método baseado em visão que ajuda robôs a localizar de forma confiável onde agarrar cada encomenda em um emaranhado, aproximando‑se um passo de uma triagem totalmente automatizada, mais rápida e menos trabalhosa.
De pilhas bagunçadas a dados amigáveis ao robô
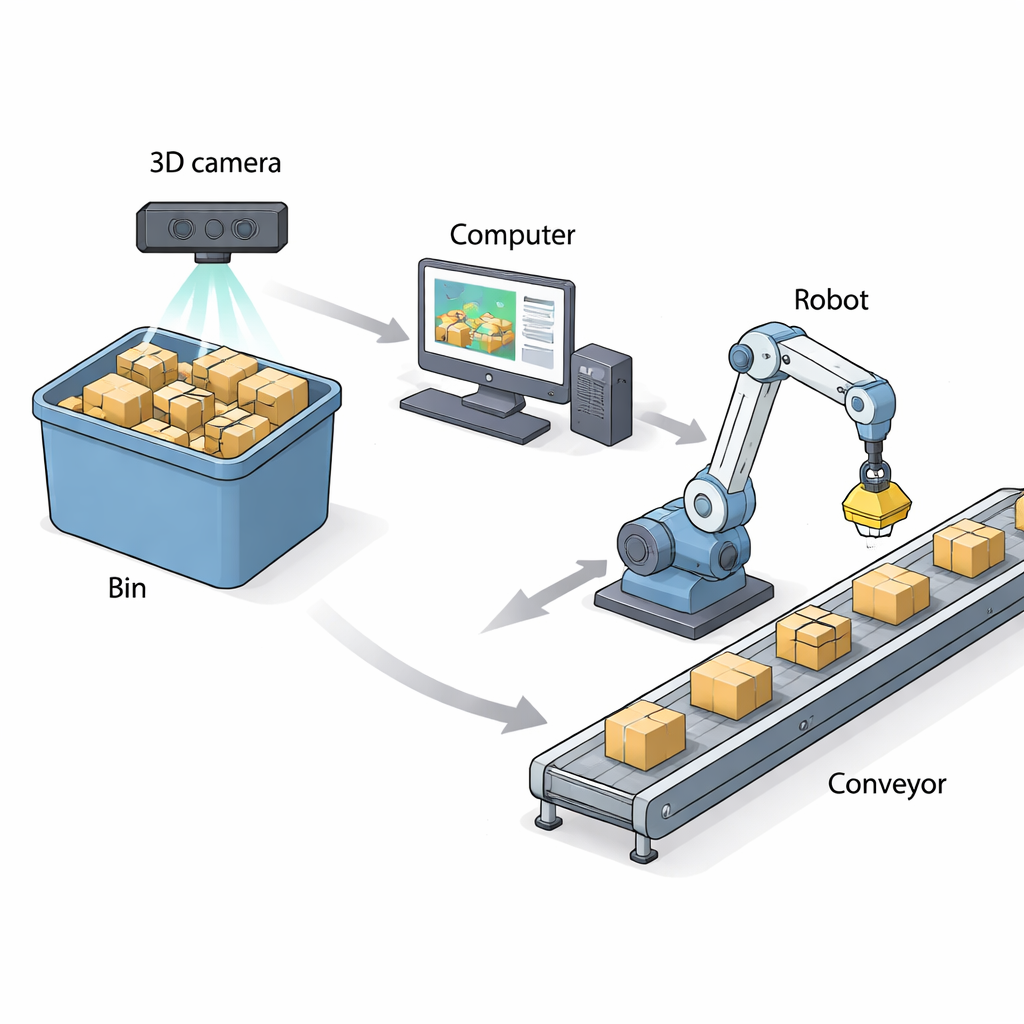
Os pesquisadores concentram‑se no que chamam de encomendas de logística “desordenada”: caixas do dia a dia e envelopes acolchoados jogados em contêineres sem ordem, às vezes amassados ou deformados pelo empilhamento. Para substituir os trabalhadores humanos nesse ambiente bagunçado, um robô primeiro precisa saber exatamente onde alcançar e como orientar sua garra na superfície do pacote alvo. A equipe constrói um sistema em torno de uma câmera 3D que captura tanto uma imagem colorida quanto um mapa de profundidade da camada superior de pacotes. Uma rede moderna de reconhecimento (baseada em YOLOv8) identifica pacotes individuais na imagem colorida, enquanto o mapa de profundidade revela sua forma tridimensional. Essa combinação permite ao computador escolher o melhor pacote para agarrar a seguir—um que não esteja muito ocluído e suficientemente afastado das bordas do contêiner—antes de calcular um ponto de preensão preciso.
Encontrando um ponto de preensão estável com três pontos e uma sombra
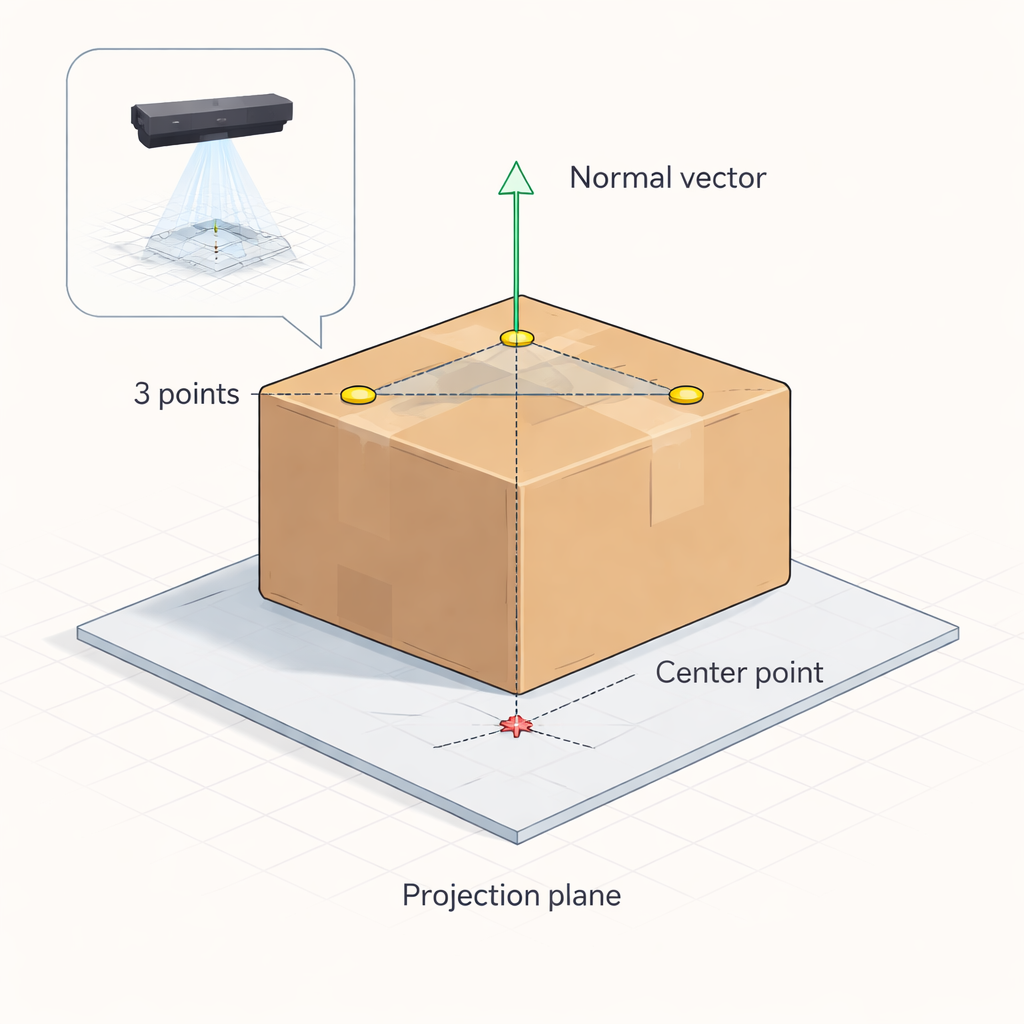
No cerne do método está um truque geométrico que os autores chamam de algoritmo de centralização por orientação–projeção de três pontos. Uma vez escolhido o pacote alvo, o sistema seleciona aleatoriamente três pontos em sua superfície superior a partir dos dados de profundidade. Esses três pontos definem um plano, assim como três pinos sobre uma mesa definem sua inclinação. A partir desse plano, o algoritmo calcula uma direção “normal”—uma linha reta saindo perpendicularmente à superfície do pacote. Paralelamente, o sistema usa os quatro cantos superiores do pacote na imagem para inferir o centro geométrico de sua projeção, semelhante a encontrar o centro da sombra de um retângulo. A combinação da orientação do plano com essa posição central resulta em uma localização de preensão 3D precisa e na inclinação da superfície superior do pacote, que pode então orientar a ventosa ou a garra do robô.
Tratando pacotes amassados e salientes
Pacotes reais não são blocos perfeitos: envelopes bolha cedeem, sacos macios ficam salientes e caixas de papelão podem deformar sob carga. Uma suposição simples de superfície plana falharia nesses casos. Para resolver isso, os autores estendem sua matemática para distinguir três situações: pacotes quase planos, tampas convexas (salientes) e superfícies côncavas (afundadas). Comparando os valores de profundidade mais altos e mais baixos na superfície de um pacote, o sistema decide primeiro se ele está significativamente deformado. Se estiver, analisa como a superfície deformada intersecciona um plano de referência imaginário e ajusta uma elipse aproximada a essa interseção. A partir disso, resolve um plano “ideal” que melhor representa uma superfície de preensão estável—mesmo que o topo real esteja afundado ou saliente—e então projeta o ponto de preensão chave de volta para esse plano.
Colocando o algoritmo à prova
Para verificar se a matemática funciona na prática, a equipe construiu um banco de testes com um robô industrial de seis eixos, uma câmera 3D e um dispositivo personalizado de laser e sonda. Primeiro, marcaram o verdadeiro centro geométrico da superfície superior de cada pacote de teste e usaram dois feixes de laser para localizar essa posição física no espaço. Em seguida, deixaram seu algoritmo de visão calcular sua própria estimativa do mesmo centro e comandaram o robô para mover uma segunda sonda até o ponto calculado. Medindo o pequeno deslocamento entre as duas pontas de sonda, puderam calcular o erro de posicionamento. Testes com modelos de caixa rígida de madeira e materiais de embalagem realistas—cartões corrugados, envelopes bolha e sacos plásticos, em tamanhos de até 250×250 mm—mostraram um erro máximo de posicionamento de cerca de 1,7 milímetro e erros médios próximos de 1 milímetro por eixo. O cálculo completo para cada pacote levou cerca de 17,5 milissegundos, rápido o suficiente para linhas de triagem de alto rendimento.
O que isso significa para os armazéns do futuro
Em termos simples, o estudo demonstra que um robô equipado com uma câmera 3D e este algoritmo de três pontos baseado em projeção pode determinar de forma confiável onde e como agarrar pacotes de um contêiner bagunçado com precisão de nível milimétrico. Embora deformações fortes em pacotes muito macios ainda reduzam um pouco a precisão, o método permanece robusto o suficiente para condições realistas de armazém. À medida que os volumes de encomendas continuam a subir e as faltas de mão de obra persistem, tais algoritmos podem permitir trabalhos mais seguros e menos monótonos ao transferir as tarefas mais pesadas e repetitivas das pessoas para as máquinas—enquanto ajudam a manter em funcionamento o crescente mundo do comércio eletrônico.
Citação: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Palavras-chave: visão 3D, triagem de encomendas, apreensão robótica, automação logística, localização de objetos